 |
Главная |


Лабораторная работа № 2: Прерывания и их применение. Использование таймеров
|
из
5.00
|
Цель работы:ознакомится с использованием прерывания,возможностями,которые они предоставляют;применять таймеры для выполнения действий в определенные временные интервалы.
Прерывания – механизм, который позволяет аппаратному обеспечению сообщать о наступлении важных событий в своей работе. В момент, когда происходит прерывание, процессор переключается с выполнения основной программы на выполнение соответствующего обработчика прерываний. Как только выполнение обработчика завершено, продолжается выполнение основной программы с места, в котором она была прервана.
Для использования прерываний необходимо вначале настроить регистр, который называется Nested Vector Interrupt Controller (NVIC), всторенный контроллер вектора прерываний. Данный регистр является стандартной частью архитектуры ARM и встречается на всех процессорах, независимо от производителя. NVIC разработан таким образом, что задержка прерывания минимальна. NVIC поддерживает встроенные прерывания с 16-ю уровнями приоритета.
Микроконтроллер STM32F407VG содержит 14 таймеров.
Производитель разделяет все таймеры на три типа:
1) с расширенными возможностями Advanced-control timers (TIM1 и TIM8);
2) общего назначения General-purpose timers (TIM2, TIM3, TIM4, TIM5);
3) базовые Basic timers.
Каждый таймер может иметь до 4 линий захвата/сравнения (именно они используются в режиме генерации ШИМ).
Код программы обеспечивает переключение светодиода с интегрированного к порту GPIO через параметры времени, заданные TIM1.
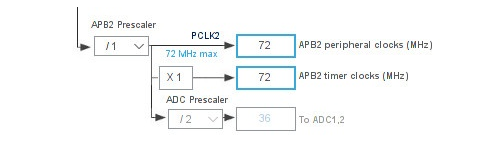
Сконфигурируем в CubeMX источник тактирования в модуле Mode. Зададим Clock Source ⇨ Internal Clock —это значит, что генератор тактирования внутренний — частота задается на плате от шины APB2.

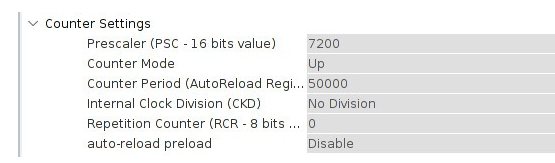
Конфигурируем таймер в CubeMX:
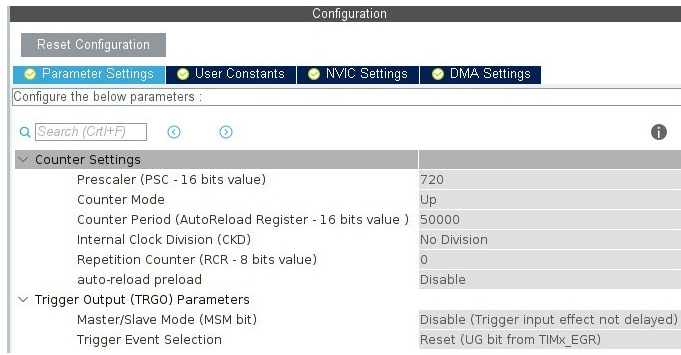
Up — счётчик будет считать «вверх», от нуля до значения переполнения.
Down — счётчик будет считать «вниз», от значения переполнения до нуля.
Counter Period — Счётчик будет считать до 50000. При частоте 100кГц он досчитает до 50000 за 500мс., нужно вычитать «1» из числа. Поэтому зададим 49999.
В CubeMX зададим прерывание.

TIM1 update interrupt — прерывание при переполнении, когда счётчик переполнится, он обновится (update).
Перед while(1) в режиме прерывания запустим таймер 1:
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim1);
/* USER CODE END 2 */
\мигаем светодиодом\
/* USER CODE BEGIN 0 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM1) //check if the interrupt comes from TIM1
{
HAL_GPIO_TogglePin(led14_GPIO_Port, led14_Pin); \инициализировали мигание светодиода с пина14
Сконфигурируем тактирование микроконтроллера источником внешнего сигнала ETR2.
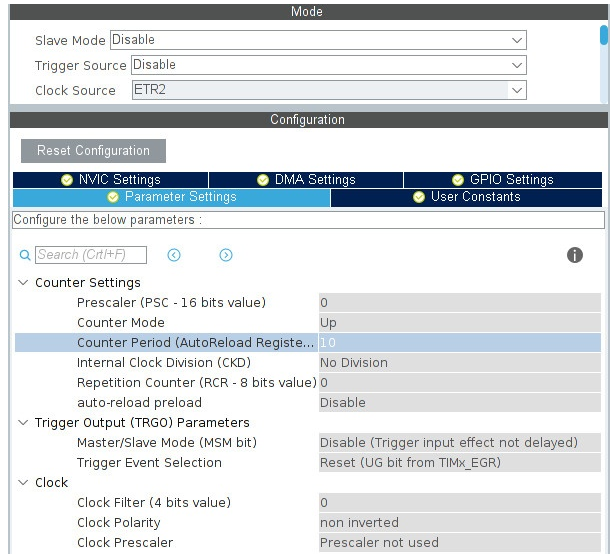
Зададим переполнение равным 10.
External clock source mode 2 читается как ETR2.
В данном режиме таймер тактируется, когда импульс с низкого уровня становится высоким на выводе TIM1_ETR (PA1).
Фильтр входящего сигнала Clock Filter, устраняет дребезг в линии аппаратно.
Параметр Clock Polarity — не инвертировать, поэтому таймер тактируется в момент перехода с высокого уровня на низкий.
В CubeMX параметр Clock Prescaler — пред делитель частоты входящего сигнала
Применим к входному сигналу фильтр №6.
fSAMPLING=fDTS/4, N=6.
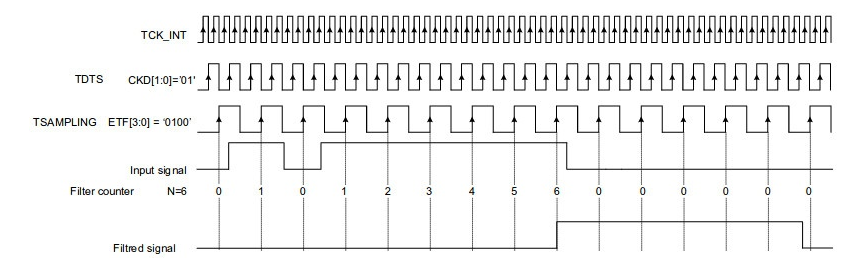
TCK_INT
Опорной частотой для синтеза служит системная частота таймера (шина APB2).
TDTS
Вспомогательный тактовый сигнал
TSAMPLING
Частота синтеза меньше системной частоты таймера.
На вход таймера сигнал придет с порта GPIO РА3 он настроен на выход. Время задержки поставим 50 мс.
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim1);
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_GPIO_WritePin(pa5_GPIO_Port, pa5_Pin, GPIO_PIN_RESET);
HAL_Delay(50);
HAL_GPIO_WritePin(p5_GPIO_Port, pa5_Pin, GPIO_PIN_SET);
HAL_Delay(50);
Соединяем порт PA5 с портом светодиода PA14 (TIM1_ETR) и компилируем программу.
Таймер имеет четыре канала, которые могут взаимодействовать как с GPIO портами так и с выводами МК, связанными с таймерами.
Первый канал в режиме выхода — Output Compare. Прерывание будет происходить в момент переключения.
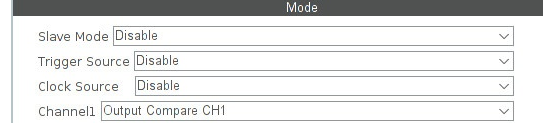
В строке Chanel1 укажем режим Output Compare СН1.
Пред делитель установим 7200, а в строке Counter Period поставим 50000. Через 5 с будет происходить переполнение.
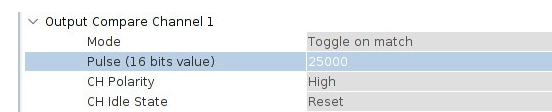
В CubeMX в строке Mode поставим Toggle on match — в момент сравнения, на выводе микроконтроллера PA8 (TIM1_CH1) происходит переключение.
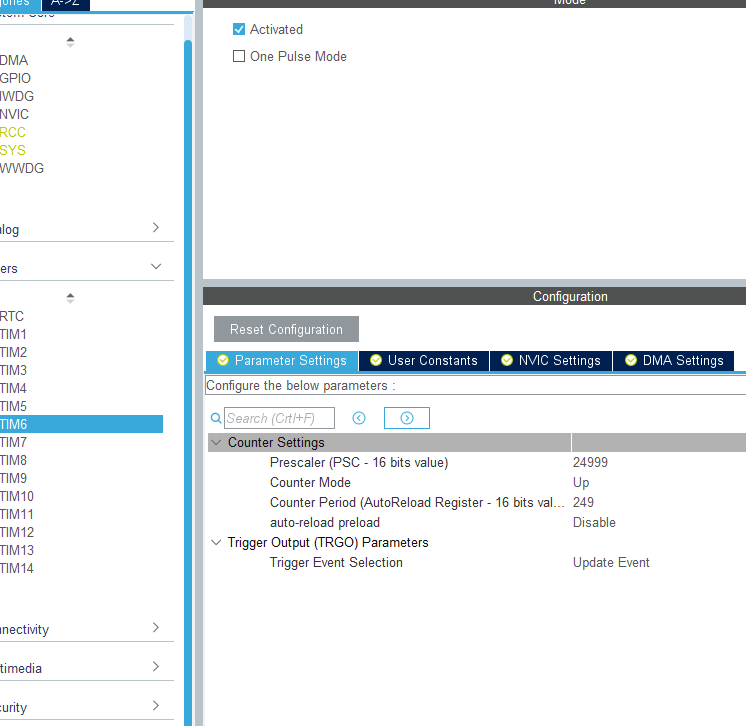
Сконфигурируем контроллер по счетчику TIM6:
Пример программы
Код программы выполняет работу с прерываниями и с таймерами. Светодиод, который подключен к порту ввода/вывода GPIO, переключается через определенные интервалы времени.
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usb_host.h"
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_I2S3_Init(void);
static void MX_SPI1_Init(void);
static void MX_TIM1_Init(void);
void MX_USB_HOST_Process(void);
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim->Instance == TIM1)
{
HAL_GPIO_TogglePin(LD4_GPIO_Port, LD4_Pin);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_I2S;
PeriphClkInitStruct.PLLI2S.PLLI2SN = 192;
PeriphClkInitStruct.PLLI2S.PLLI2SR = 2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
void TIM6_DAC_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_DAC_IRQn 0 */
/* USER CODE END TIM6_DAC_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_DAC_IRQn 1 */
switch(count){
case 0:
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
count++;
break;
case 1:
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_SET);
count++;
break;
case 2:
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_SET);
count++;
break;
case 3:
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_SET);
count++;
break;
default:
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
count = 1;
break;
}
//HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);
/* USER CODE END TIM6_DAC_IRQn 1 */
}
Порядок работы
1. На основе примера написать свой код в среде разработки и скомпилировать его.
2. Ознакомиться с работой программы.
3. Создать новый проект в среде CubeMX и Keil.
4. Скомпилировать код на плату и проверить работу на отладочной плате Discavery.
|
из
5.00
|
Обсуждение в статье: Лабораторная работа № 2: Прерывания и их применение. Использование таймеров |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы