 |
Главная |


Пропорциональные исполнительные механизмы
|
из
5.00
|
Такими являются механизмы с резисторными или индуктивными устройствами обратной связи типа ПР, ИМ, КДУ, МЭО, МЭМ, МЭК и др.
В электрических схемах исполнительных механизмов типа ПР-1М используется двухфазный асинхронный двигатель, блок управляющих контактов, конечные выключатели SQ 1, SQ 2 и резисторное устройство обратной связи, рисунок 6.2, а. При замыкании контакта К1 напряжение на одну из обмоток двигателя подается непосредственно от сети, а на другую – через конденсатор С (емкость конденсатора обеспечивает сдвиг 900 между фазами тока в обмотках). Двигатель вращается в одном направлении. При замыкании контакта К2 двигатель реверсируется. Контакты SQ 1 и SQ 2 включаются последовательно с соответствующими контактами К1 и К2, обеспечивая разрыв цепи питания двигателя при подходе регулирующего органа к крайним положениям.
Ниже приведены технические данные исполнительных механизмов:
| ПР-1М | ИМ | |
| Мощность, Гном, Вт……………………………………….. | 60 | 25 |
| Частота вращения, n, об/мин……………………………… | 1500 | 3000 |
| Данные редуктора (передаточное отношение i)………….. | 6 пар сменных шестерен | |
| Перестановочный момент М, Н м………………………… | 3,2 – 10 | 20 |
| Время одного оборота Тс, с………………………………… | 20 – 240 | 120 |
| Сопротивление резисторного датчика Rос обратной связи, Ом……………………………………………………….. | 185 | 120 |
| Напряжение U, В…………………………………………… | 24 | 12 |
| Угол поворота вала φ, град………………………………… | 0 - 180 | 5 - 120 |
У исполнительных механизмов типа КДУ (колонки дистанционного управления) используют трехфазный асинхронный короткозамкнутый двигатель с редуктором, реверсивный магнитный пускатель с ключом управления КУ и дистанционным указателем положения ДУП. В КДУ-1 используют резисторный, а в КДУ-2 - индуктивный указатели положения.
Принципиальная схема КДУ приведена на рисунке 6.2, б. Ключом управления КУ включают цепи трехфазного реверсивного магнитного пускателя, обеспечивая требуемое направление вращения исполнительного двигателя (вперед, назад). Движок резистивного датчика указателя ДУП связан с рабочим валом. Резистор указателя ДУП с сопротивлением R образует мостовую измерительную схему, в диагональ которой включен миллиамперметр, проградуированный в процентах от максимального угла поворота рабочего вала. Для ограничения угла поворота в колонке используют концевые выключатели SQ 1 – SQ 4. Выключатели SQ 1 и SQ 3 служат для предупреждающей сигнализации. При приближении к крайнему положению размыкается SQ 1 и зажигается сигнальная лампа. Если ключ управления не выключен, то исполнительный механизм продолжает работать до отключения SQ 2. теперь движение исполнительного механизма возможно при противоположном положении ключа КУ с использованием в цепи управления выключателей SQ 2 и SQ 4. В КДУ предусмотрен штурвал ручного поворота рабочего вала.

а – типа ПР-1М; б – типа КДУ
Рисунок 6.2 – Схемы исполнительных механизмов
Электрический исполнительный механизм постоянной скорости типа МЭО однооборотный и предназначен для перемещения регулирующего органа в системах релейного регулирования и дистанционного управления.
Принципиальная электрическая схема исполнительного механизма типа МЭО приводится на рисунке 6.3. На клеммы 1 – 2 выведены концы обмотки возбуждения электродвигателя ОВ, последовательно с которой включен конденсатор С. Обмотка управления ОУ выведена на клеммы 3 – 4. параллельно с обмоткой управления включена обмотка электромагнита ЭМ тормозного механизма.
Преобразователи предельной информации по своему назначению бывают концевыми и предельных моментов. Первые выключают электродвигатели при достижении исполнительным устройством заданного положения, вторые – при превышении заданного предельного момента в системе «электродвигатель - редуктор». Основой этих устройств являются различного рода контактные и бесконтактные переключатели; из них наиболее распространены контактные микропереключатели. Переключатель (В1 – В4) имеет один размыкающий и один замыкающий контакты с независимыми цепями.
Микропереключатели конструктивно объединены в один узел, унифицированный для различных исполнительных механизмов; таким узлом является блок типа БДИ-6. На передней его стенке находится шкала местного указателя положения со стрелкой и флажки для указания пределов настройки конечных положений.
Дифференциально – трансформаторный датчик состоит из корпуса, внутри которого помещены две одинаковые катушки. Внутри катушек находится сердечник, перемещение которого вызывает перераспределение падений напряжений на катушках датчика. Датчики положения используются для подачи сигналов на дистанционные указатели положения регулирующего органа и в качестве отрицательной обратной связи на вход регулятора.

Рисунок 6.3 – Электрическая схема исполнительного механизма типа МЭО
В механизмах МЭО могут устанавливаться и другие модификации датчиков положения: реостатный БДР или токовый БСПТ. В БДР встроены четыре реостата на 120 Ом с токосъемниками и контактными кольцами, в БСПТ – блоки магнитных датчиков и усилителей.
Рассмотрим блок сигнализации положения реостатный БСПР-12. Блок предназначен для установки в электрические исполнительные механизмы с целью преобразования положения выходного органа механизма в электрический сигнал, сигнализации и блокирования в крайних положениях или промежуточных положениях выходного органа. Для визуального наблюдения положения выходного органа блок может иметь шкалу со стрелкой.
Блок состоит из следующих основных составных частей: блока микропереключателей в составе 4-х микропереключателей и блока датчика, рисунок 6.4.
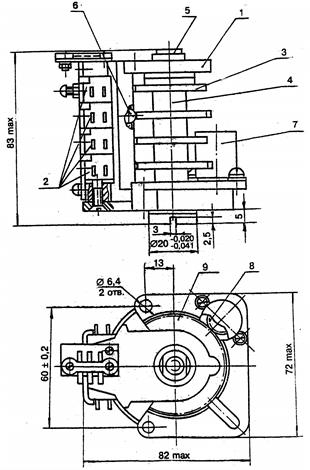
1- корпус; 2 – микропереключатели; 3 – кулачок; 4 – вал; 5 – гайка; 6 - шарик;
7 – резистор; 8, 9 – шестерни;
Рисунок 6.4 – Блок без шкалы
Блок микропереключателей состоит из корпуса 1 с установленными на нем микропереключателями 2.
Микропереключатели предназначены для ограничения перемещения и сигнализации положения выходного вала механизма. Микропереключатели расположены компактно и образуют собственно блок концевых выключателей БКВ. Каждый микропереключатель имеет размыкающийся и замыкающийся контакты с раздельными выводами на контакты штепсельного разъема механизма.
Четыре кулачка закреплены на валу 4 с помощью гайки 5.
При повороте вала кулачка через шарики 6, упор, пружину нажимают на толкатели микропереключателей и вызывают их срабатывание.
Блок датчика предназначен для преобразования углового перемещения выходного механизма в пропорциональный электрический сигнал.
Блок датчика состоит из закрепленного на корпусе 1 резистора 7, соединенного с валом 4 посредством зубчатой передачи, состоящей из шестерен 8 и 9.
При повороте вала 4 на полный рабочий ход валик резистора проходит полный диапазон.
Блок может быть изготовлен в одном из двух исполнений: с указателем положения выходного вала, состоящим из шкалы 10 и стрелки 11, рисунок 6.5 и 6.6 или без указателя положения рисунок 6.4. Шкала крепится к корпусу блока винтами 12.
Схема электрическая принципиальная блока приведена на рисунке 6.7.
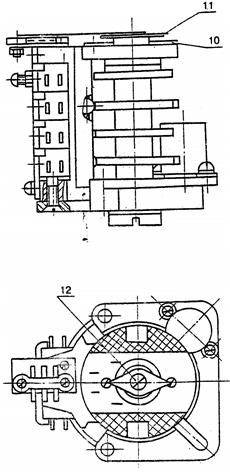
10 – шкала; 11 – стрелка; 12 - винт
Рисунок 6.5 – Блок со шкалой

Рисунок 6.6 – Блок со шкалой на диапазон регулирования 1800

Рисунок 6.7 – Схема электрическая принципиальная БСПР-12
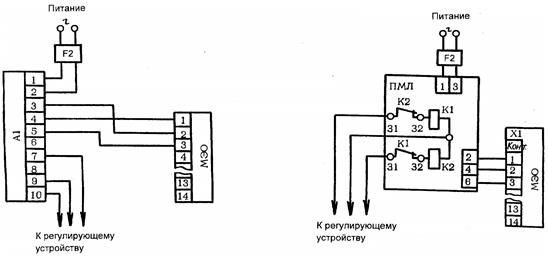
Рисунок 6.8 – Схема управления исполнительным механизмом типа МЭО
На рисунке 6.8 и приведены схемы соединений регулирующих приборов с пускателями и исполнительными механизмами.
Если регулируемая величина отклоняется от заданного значения за пределы зоны нечувствительности регулирующего прибора, на выходе электронного блока прибора появляется сигнал, в результате чего пускатель срабатывает и включает электродвигатель исполнительного механизма, который начинает перемещать регулирующий орган в сторону восстановления заданного значения регулируемой величины. В этот момент, когда воздействие устройства обратной связи уравновесит воздействие внешнего сигнала, поступающего от преобразователей, катушки пускателей обесточатся и электродвигатель остановится. Периодические включения электродвигателя будут происходить до тех пор, пока значение регулируемой величины не станет равным заданному.
Чтобы уменьшить угол выбега исполнительного механизма, после отключения электродвигателя от сети параллельно одной из фаз обмотки двигателя через нормально замкнутые блок-контакты магнитного пускателя включается электрический тормоз ЭМ. Тормоз имеет электромагнитный привод в виде соленоида, включаемого параллельно с обмоткой управления двигателя. При обесточенном электромагните с помощью рабочей пружины обеспечивается необходимое усилие торможения. При появлении силового напряжения на управляющей обмотке электродвигателя появляется ток и в обмотке соленоида. Якорь втягивается и отводит тормозную колодку от вала электродвигателя. При исчезновении напряжения на управляющей обмотке соленоид обесточивается, и вал электродвигателя тормозится с помощью пружины и тормозной колодки.
Исполнительные механизмы МЭО выпускаются в различных модификациях, отличающихся номинальным крутящим моментом на выходном валу (первая цифра), номинальным временем полного хода выходного вала исполнительного механизма в секундах (вторая цифра), номинальным полным ходом выходного вала в оборотах (третья цифра).
Примеры обозначений исполнительных механизмов МЭО:
| МЭО-16/25-0,25 | МЭО-250/25-0,25 |
| МЭО-16/63-0,25 | МЭО-250/63-0,25 |
| МЭО-40/10-0,25 | МЭО-400/160-0,63 |
| МЭО-100/10-0,25 | МЭО-630/25-0,25 |
| МЭО-100/25-0,25 | МЭО-630/63-0,25 |
Примеры обозначений выпускаемых исполнительных механизмов типа МЭОБ и МЭОК:
| МЭОБ-25/100-1 | МЭОК-25/100-1 |
| МЭОБ-25/100-2 | МЭОК-25/100-2 |
| МЭОБ-25/100-3 | МЭОК-25/100-3 |
| МЭОБ-63/100-1 | МЭОК-63/100-1 |
| МЭОБ-63/100-2 | МЭОК-63/100-2 |
| МЭОБ-63/100-3 | МЭОК-63/100-3 |
Последняя цифра означает тот или иной вариант использования блока сервомотора.
|
из
5.00
|
Обсуждение в статье: Пропорциональные исполнительные механизмы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы