 |
Главная |


Тиристрорные контакторы
|
из
5.00
|
На рисунке 7.3 представлена принципиальная электрическая схема однофазного тиристорного контактора переменного тока. Для пуска контактора необходимо включить в сеть катушку КМ. Через контакты этого реле на резисторы R1, R2 и диоды VD1 и VD2 будут поданы сигналы в цепи управления тиристоров VS1 и VS2. При положительной полуволне синусоидального напряжения (плюс на клемме 2) на анод тиристора VS1 будет подан положительный потенциал, а на анод тиристора VS2 – отрицательный потенциал. При этом откроется тиристор VS1 и в нагрузке Zнагр появится ток положительной полуволны (тиристор VS2 остается закрытым). Затем последует отрицательная полуволна переменного напряжения (плюс на клемме 1 и минус на клемме 2), при которой закроется тиристор VS1 и откроется тиристор VS2, через который пройдет ток нагрузки отрицательной полуволны. Для того, чтобы отключить нагрузку Zнагр, следует выключить катушку реле КМ, при этом прекратится подача сигналов на управляющие электроды тиристоров и они окажутся запертыми.
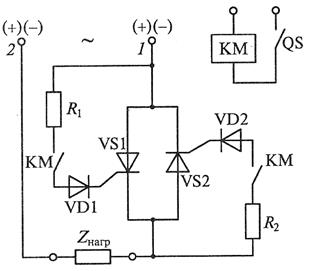
Рисунок 7.3 Принципиальная электрическая схема тиристорного контактора
Промышленность выпускает тиристорные контакторы на номинальное напряжение 380 В типа ТКЕО-250/380 на номинальный ток 250 А и типа ТКЕП-100/380 на ток 100 А. Изготовляют также тиристорные пускатели серии ПТ на напряжение 380 В и номинальный ток 16 и 40 А.
На рисунке 7.4 представлена нереверсивная схема управления электродвигателем постоянного тока независимого возбуждения ИМ. Управление величиной тока в цепи якоря электродвигателя осуществляется тиристором Т.
Обмотка возбуждения электродвигателя ОВ включена непосредственно в сеть постоянного тока и напряжение Uв. Значение тока через тиристор регулируют по принципу фазового управления тиристором. Сущность этого способа управления основана на изменении времени момента отпирания тиристора. С этой целью в схеме применена фазосдвигающая цепочка r1C, где r1 – резистор переменного сопротивления. Значение управляющего сигнала Uу и его фазовый сдвиг относительно напряжения U1 зависят от сопротивления резистора r1. При полностью введенном сопротивлении r1 значительная часть напряжения U2 падает на переменном резисторе, так что падение напряжения на конденсаторе Uс = Uу оказывается недостаточным для создания напряжения управления, требуемого для отпирания тиристора. С уменьшением сопротивления r напряжение Uу возрастает и достигает значения, достаточного для отпирания тиристора при положительной полуволне напряжения U2. однако управляющее напряжение Uу оказывается сдвинутым по фазе относительно напряжения U2, так что отпирание тиристора происходит в конце положительной полуволны напряжения U2. поэтому действующее значение тока Iа в цепи якоря электродвигателя ИМ невелико и якорь электродвигателя вращается с небольшой частотой.
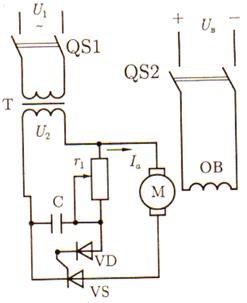
Рисунок 7.4 – Управление электродвигателем постоянного тока тиристором
При дальнейшем уменьшении сопротивления электродвигателя r1 фаза напряжения на управляющем электроде тиристора Uу меняется таким образом, что отпирание тиристора происходит в более ранний момент времени, когда положительная полуволна напряжения U2 проходит свой максимум или же еще не достигла этого значения. При этом действующее значение тока якоря Iа электродвигателя возрастает, что ведет к увеличению электромагнитного момента, а следовательно, и частоты вращения электродвигателя.
Назначение диода в цепи управления тиристора состоит в том, чтобы исключить попадание отрицательного потенциала на управляющий электрод.
Тиристорные пускатели
Тиристорное коммутирующее устройство: пускатель бесконтактный реверсивный ПБР-2М предназначен для бесконтактного управления электрическим исполнительным механизмом по ГОСТ 7192 с однофазным конденсаторным электродвигателем и имеет две модификации: ПБР-2М и ПБР-2М1. Пускатель ПБР-2М – для механизмов, имеющих электромагнитный тормоз, ПБР-2М1 – для механизмов, имеющих механический тормоз.
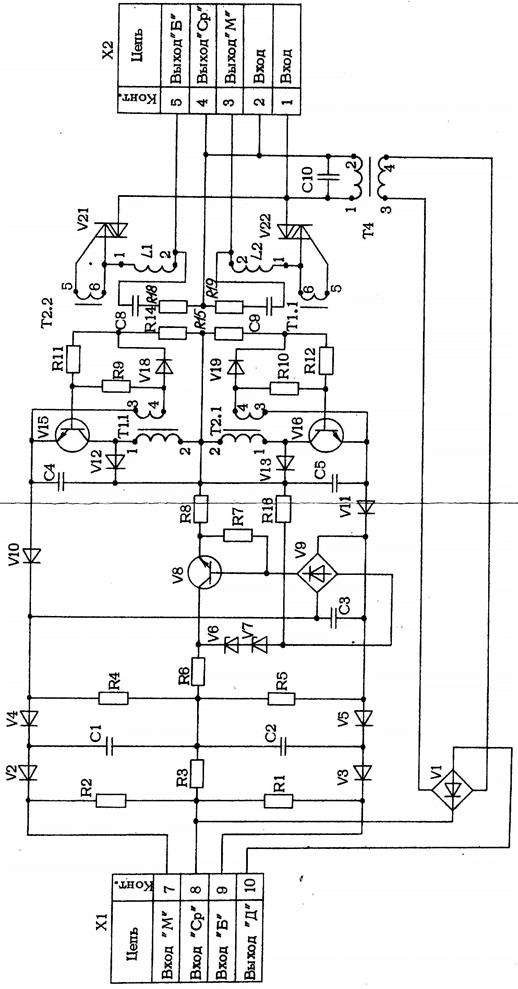
Схема пускателя приведена на рисунке 7.5 и состоит из схемы управления бесконтактными ключами, силовой схемы, коммутирующей напряжение питания механизма, источника питания для дистанционного управления пускателем.
В схеме управления резисторы R1, R2 задают входное сопротивление пускателя при малом уровне входного сигнала. Резистор R3 ограничивает бросок входного тока при подаче сигнала управления на вход пускателя. Конденсаторы С1, С2 и диоды V2, V3 сглаживают пульсацию управляющего сигнала. Транзистор V8, резисторы R4, R5 и выпрямительный мост V9 исключает включение блокинг-генератора при подаче сигнала управления на оба входа.
Стабилитроны V6, V7 предназначены для защиты транзистора V8 от пробоя при перегрузке пускателя по входному сигналу.
Блокинг-генераторы, формирующие импульсы управления триаками, состоят из транзисторов V15, V16, диодов V10 – V13, V18, V19; трансформаторов Т1,Т2; конденсаторов С4, С5; резисторов R8 – R16.
В силовой схеме триаки V21, V22 коммутируют напряжение, от которого осуществляется электрическое питание механизма, а конденсаторы С8, С9 и резисторы R18, R19 улучшают условия коммутации. Дроссели L1, L2 ограничивают величину ударного тока при аварийных перегрузках триаков.
Источник питания цепи дистанционного управления состоит из трансформатора Т4 и выпрямительного моста V1. Вывод источника с отрицательным потенциалом соединен с клеммой 10 (выход «Д»), а с положительным – с клеммой 8 (выход «Ср»).
Входной сигнал управления пускателем – постоянное напряжение (24±6) В – подается на клеммы 8 – 7 или 8 – 9. На клемму 8 (вход «Ср») подается положительный потенциал, на клеммы 7 (вход «М») или 9 (вход «Б») – отрицательный потенциал сигнала управления.
Обозначения «М» (меньше) и «Б» (больше) приняты условно.
В исходном состоянии (входные сигналы отсутствуют) напряжение питания на схеме управления нет, триаки закрыты.
При подаче управляющего сигнала на клеммы 8 – 7 (8 - 9) заряжаются конденсаторыС1 (С2) и С3.
Напряжение с конденсатора С3 через выпрямительный мост V9 подается на вход эмиттерного повторителя, выполненного на транзисторе V8.
Напряжение с выхода эмиттерного повторителя подается на блокинг-генераторы, выполненные на транзисторах V15, V16 и трансформаторах Т1, Т2. Блокинг-генераторы формируют импульсы, отпирающие триаки V21, V22. питающее напряжение с клеммы 1 через открытые триаки V21, V22 подается на вход пускателя клемму 5.
Замыкание клемм 7 – 8 и 8 – 9 производится выходными ключами регулирующих приборов, либо блоком ручного управления.

Задающие элементы
К задающим элементам относятся устройства ввода задания (задатчики скорости, силы тока и т.д.) и задатчики интенсивности. По виду сигналов задающие элементы делятся на аналоговые и цифровые.
В электрических программных и следящих регуляторах носители программ, как правило, выполняют в виде функциональных потенциометров.
По способу реализации заданной функции потенциометры подразделяют на профильные; ступенчатые (частный случай профильных); с некруглым винтовым каркасом; с переменным шагом намотки; с секциями, выполненными из провода различного сечения; с дополнительными постоянными резисторами, шунтирующие обмотку, имеющую отводы, рисунок 7.7.
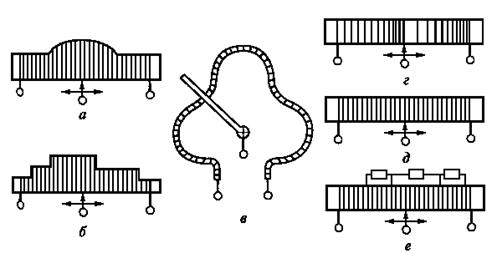
а – профильный; б – ступенчатый; в – с некруглым каркасом; г – с переменным шагом намотки; д – с секциями, выполненными из провода различного сечения; е – с шунтирующими резисторами
Рисунок 7.7 Функциональные потенциометры
Для автоматических устройств с малым диапазоном регулирования параметров (например, скорости или частоты вращения) используется один потенциометр, рисунок 7.8, большим – два, рисунок 7.9.
|
|
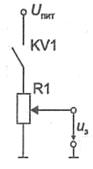
Рисунок 7.8 – Потенциометрический задатчик скорости
Потенциометр R1 служит для грубого задания скорости, R2 – для точного. Для повышения точности задания скорости, задающие элементы питаются стабилизированным напряжением ±Uпит. Как правило, Uпит = ±10 В.
|
|
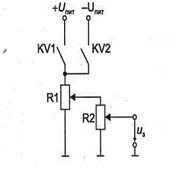
Рисунок 7.9 – Потенциометрический задатчик скорости с точным заданием
Вместо потенциометров со скользящим контактом в системах автоматического управления используется бесконтактные задатчики скорости. Основой их являются бесконтактные сельсины и вращающиеся трансформаторы, выходное напряжение которых пропорционально углу поворота вала на требуемый угол.
В качестве цифровых задатчиков используются многопозиционные переключатели. Они представляют собой десятипозиционные (или более)переключатели сегментного типа с барабанным толкателем. На цилиндрической поверхности барабана нанесены номера сегментных ламелей, с которыми поочередно замыкается общий круговой вывод переключателя при переводе барабана из одного механически фиксируемого положения в другое. Многопозиционные плоские переключатели позволяют при наборе обычного десятичного числа получать на выходе то же число, но в двоичном либо двоично-десятичном коде.
В качестве бесконтактного цифрового задатчика используется фотоэлектрический преобразователь перемещения, число импульсов, на выходе которого пропорционально углу поворота вала на требуемый угол.
Задатчики интенсивности служат для получения линейного (в большинстве случаев) закона изменения во времени задающего сигнала, в частности сигнала задания скорости. Функциональная схема аналогового задатчика интенсивности представлена на рисунке 7,10 и состоит из компаратора А1 и интегратора А2, охваченных обратной связью, При ступенчатом изменении входного сигнала u1, компаратор А1 входит в состояние насыщения с напряжением u2, а интегратор А2 начинает интегрировать напряжение u2. Интегрирование продолжается до момента равенства напряжений u1 и u3, С этого момента входное напряжение u3 интегратора А2 устанавливается на уровне u1. Скорость изменения во времени напряжения u3 на выходе задатчика интенсивности.

где U2max – напряжение насыщения компаратора А1.
|
|
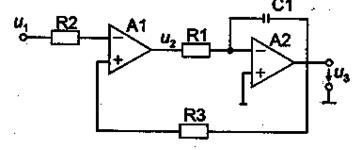
Рисунок 7.10 – Функциональная схема задатчика интенсивности
Контрольные вопросы:
1. Преимущества бесконтактных коммутирующих устройств по сравнению с контактными.
2. Проанализируйте работу схемы, представленную на рисунке 7.3.
3. Поясните более подробно работу схемы на рисунке 7.4
4. Проанализируйте работу схемы, представленную на рисунке 7.5.
5. Расскажите классификацию задающих устройств.

Раздел 4 Цифровые системы автоматического управления
Глава 8 ЭВМ и микропроцессоры в САУ
Включение ЭВМ в САУ
В современных САУ для реализации сложных алгоритмов управления применяют как аналоговые, так и цифровые ЭВМ. Аналоговые вычислительные устройства используют, например, для сложения и вычитания воздействий в контурах управления, вычитания производных и интегралов, построения перестраиваемых моделей ОУ в адаптивных системах, т.е. там, где реализуются основные достоинства аналоговой техники: большое быстродействие, возможность работы в реальном масштабе времени и непосредственного сопряжения с измерительными и исполнительными устройствами, относительная простота, высокая экономическая эффективность. Но недостаточные точность и помехоустойчивость аналоговых устройств, неудобство и ограниченные возможности программирования, а также все возрастающая сложность подлежащих реализации алгоритмов обуславливают применение цифровых ЭВМ.
При использовании цифровой вычислительной техники в САУ необходимо преобразовывать аналоговые сигналы в цифровые при вводе их в цифровую вычислительную машину (ЦВМ) и цифровые сигналы в аналоговые при их выводе. Для этого используют соответственно аналого-цифровые (АЦП) и цифровые (ЦАП) преобразователи, рисунок 8.1.
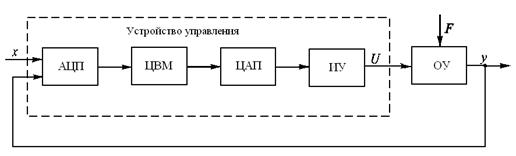
ИУ – исполнительное устройство; ОУ – объект управления; U – управляющее воздействие; F – возмущающее воздействие
Рисунок 8.1 Упрощенная структурная схема цифровой САУ
В САУ используют как специализированные цифровые вычислительные устройства, так и серийные ЦВМ. Специализированные вычислительные устройства управления, иначе называют цифровыми регуляторами, разрабатываются специально для конкретных САУ, т.е. использование их рационально в тех случаях, когда программы управления постоянны и перепрограммирование не требуется. В настоящее время для этих целей все шире применяют встроенные микропроцессоры, сочетающие в себе большие алгоритмические возможности с высокой экономической эффективностью (например, при построении систем числового программного управления станками и промышленными роботами-манипуляторами).
Для многоточечного управления сложными ОУ используют серийно выпускаемые управляющие микро- и мини-ЭВМ (УВМ).
Основными особенностями малых ЭВМ, предназначенных для применения в САУ, являются:
упрощенная система команд;
ограниченный объем оперативной памяти (примерно 64 Кбайт);
сокращенная длина машинных слов (обычно 2 байта);
упрощенный интерфейс;
наличие дополнительных устройств для автоматического схемного контроля работы всех блоков и резервирование особо важных блоков в целях повышения надежности работы ЭВМ.
В настоящее время в САУ вместо отдельных ЭВМ используют управляющие вычислительные комплексы (УВК), представляющие собой унифицированную систему технических и программных средств эксплуатационного обеспечения и стандартов. УВК используются в автоматизированных системах управления технологическими процессами (АСУТП), при автоматизации научных и технических эксперементов, в испытательных и измерительных САУ.
Набор технических средств УВК включает в себя процессорные устройства различной производительности, устройства ввода-вывода, устройства связи с объектом (УСО), устройства передачи данных (УПД), мультисистемные средства и другие устройства, позволяющие компоновать самые разнообразные САУ.
Области применения САУ все время расширяются, и сложность ОУ непрерывно возрастает, например Единая автоматизированная система связи (ЕАСС), автоматизированные системы управления предприятиями и целыми отраслями промышленности и т.д. Во всех перечисленных САУ необходимо оперативно обрабатывать столь большие объемы информации, что в качестве центрального вычислительного устройства в них используются универсальные высокопроизводительные ЭВМ.
В последние годы появились задачи управления, для реализации которых недостаточно возможностей ни аналоговых (малы точность и алгоритмические возможности), ни цифровые (малы точность и алгоритмические возможности), ни цифровых (мало быстродействие) ЭВМ. К таким задачам относятся:
управление движущимися объектами, когда траектория формируется в процессе движения;
моделирование и идентификация сложных объектов (включая биологические) в реальном масштабе времени;
создание комплексных тренажеров;
Для решения подобных задач используют гибридные (аналого-цифровые) вычислительные системы, сочетающие в себе достоинства аналоговых и цифровых ЭВМ.
|
из
5.00
|
Обсуждение в статье: Тиристрорные контакторы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы