 |
Главная |


Анализ и формализация задачи
|
из
5.00
|
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
по дисциплине "Теоретические основы радиоэлектронной борьбы"
Студент _________Косс С.В. _________________код________ группа_310_
1. Тема: "Средства радиоэлектронной защиты и подавления радиоэлектронных средств (РЭС)"
2. Срок представления курсовой работы к защите " 10 " мая 2007 г.
3. Исходные данные для проектирования:
а) Исходные данные к курсовой работе:
Тип РЛС: вертолетная РЛС.
Параметры РЛС: дальность обнаружения цели не менее 30 км;
Определяемые координаты цели: скорость, азимут.
Параметры цели: ЭПР цели Е=5 м2, максимальная скорость цели V=900 м/с;
Виды применяемых помех: уводящая по скорости, пассивная от земной поверхности.
б) Требования к проекту:
Разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
4. Обязательные разделы пояснительной записки курсовой работы
Титульный лист.
Задание на курсовую работу.
Содержание.
Введение.
Анализ задачи и ее формализация.
Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех).
Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
Анализ эффективности применения комплекса помех и средств помехозащиты.
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
Составление структурной схемы устройства и описание ее работы
Заключение
Список использованных источников
Графические материалы (1 л.)
Руководитель работы В.И. Кошелев
Задание принял к исполнению студент:______________
Введение
В современном вооруженном конфликте в полной мере используются всевозможные радиоэлектронные средства (РЭС), которые часто играют решающую роль. Поэтому каждой из конфликтующих сторон к РЭС предъявляются все более высокие требования, часто противоречащие друг другу. Именно поэтому разработка и создание РЭС является очень сложной задачей, которую можно решать только с применением самых современных подходов.
В данном курсовом проекте будет рассмотрена разработка средств радиоэлектронной защиты и подавления РЭС, т.е. будет рассмотрен вопрос создания РЭС с обоих конфликтующих сторон.
Анализ и формализация задачи
Задачи обеспечения помехопостановки и помехозащиты являются взаимосвязанными и присущи всем противоборствующим сторонами, каждая из которых, с одной стороны, пытается сорвать с помощью помех нормальную работу противника, а с другой стороны, стремится обеспечить хорошую помехоустойчивость своих РЭС, то есть обеспечить подавление активных (АП) и пассивных помех (ПП), применяемых противоборствующей стороной.
Согласно ТЗ необходимо спроектировать вертолетную РЛС с дальностью обнаружения не менее 30км, с возможностью определения азимута и скорости целей с ЭПР не менее 5м2 и скоростью не более 900м/с.
Курсовая работа включает в себя следующие пункты:
· расчет параметров бортовой РЛС (БРЛС), обеспечивающих требования ТЗ;
· расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех);
· Расчет средств помехозащиты (алгоритма помехозащиты, структуры и параметров)
· расчет зон прикрытия помехами;
· анализ эффективности применения помех и средств помехозащиты;
· оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон;
· составление структурной схемы устройства и описание ее работы;
Согласно ТЗ при расчете необходимо учесть пассивные помехи - отражения от подстилающей поверхности, Т.о. нужно предварительно подсчитать значения ЭПР помехи в м2. В качестве активной помехи в Т.З. определена помеха, уводящая по скорости. Требуется в ходе работы определить необходимую мощность помехопостановщика и выбрать структурную схему, позволяющую реализовать данную помеху. С другой стороны, требуется обеспечить нормальную работу БРЛС в условии действия помех. По окончании расчетов сделаем вывод об эффективности работы помехопостановщика и помехозащиты.
Современные БРЛС являются сложными информационными системами. Сложность БРЛС определяется ее способностью решать одну и ту же задачу различными способами с использованием различных алгоритмов обработки сигналов.
В общем случае БРЛС предназначена для информационного обеспечения процедур наведения и защиты летательных аппаратов и управления их средствами поражения. Вертолетная РЛС также должна обеспечивать пилота информацией о возможных препятствиях (различные местные предметы а также элементы рельефа земной поверхности). Для решения этих задач необходимо иметь разветвленную сеть режимов работы. К этим режимам, прежде всего, относятся:
o поиск и обнаружение воздушных и наземных целей с определением их государственной принадлежности;
o сопровождение целей, при котором формируются оценки фазовых координат, необходимые для информационного обеспечения всех используемых методов наведения и уклонения от средств поражения;
o идентификация (распознавание) целей вплоть до их типа с ранжированием по степени важности (опасности);
o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции;
o точное определение расположения препятствий на пути следования вертолета.
Расчет параметров РЛС
радиоэлектронный защита помеха
Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти закладках даны параметры РЛС, которые можно изменять.
В закладке "РЛС" (рис.1) укажем в качестве "Основного режима работы" - импульсно-доплеровский. Такой выбор связан с тем, что импульсно-доплеровские БРЛС по сравнению с импульсными станциями с режимом СДЦ обладают существенно лучшими характеристиками по обнаружению цели на встречных курсах на фоне земли. Закладка "По назначению" - бортовая РЛС. "Скорость носителя РЛС, м/с" - 100 м/с (360км/ч, что соответствует крейсерской скорости современного боевого вертолета). "Однозначно измеряемая скорость, м/с" - 900 м/с (соответствует ТЗ). "Тип обработки" - режекция и когерентное накопление.
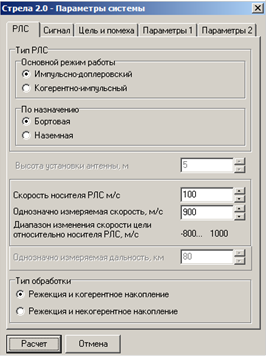
Рис.1
В закладке "Сигнал" (рис.2), укажем в качестве "Типа сигнала" - сложный. "Длина волны, см" - 3 см, такой выбор связан с тем, что близко с этим значением расположено окно прозрачности (3,3 см), что позволяет сигналу распространяться с малым затуханием в пространстве.
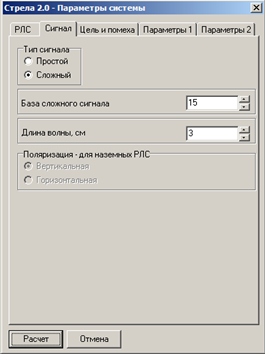
Рис.2
Далее необходимо рассчитать ЭПР помехи от подстилающей поверхности. Существует множество способов учета отражений от подстилающей поверхности. Для решение таких задач в режиме квазинепрерывного импульса (КНИ) посредством выбора частот повторения зондирующих импульсов выделяется для частотного спектра отраженного сигнала подвижной цели поддиапазон доплеровских частот, свободный от отражений подстилающей поверхности. Фактически создаются условия обнаружения цели на фоне собственных шумов приемника БРЛС.
Импульсно-доплеровские РЛС используют метод станций, работающих на непрерывном излучении. Спектр доплеровского сигнала, отраженного от поверхности земли с летящего объекта, представлен на рис.3 На нем значению мощности сигнала S (Fд) в области доплеровской частоты Fд = 0 соответствуют высотные отражения от точек подстилающей поверхности вблизи нормали, которая проведена с самолета на землю. Области частот Fдгл соответствуют отражению по оси луча антенны РЛС, скользящего по поверхности земли со скоростью перемещения самолета в горизонтальной плоскости.
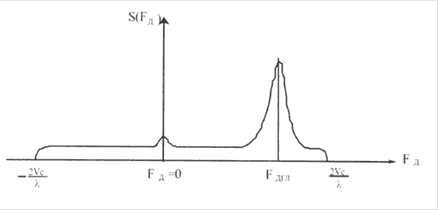
Рис.3
Применим импульсно-доплеровский метод с высокой частотой повторения (ВЧП) излучения зондирующих импульсов. Этот метод заключается в том, что выбирается частота повторения импульсов Fп большая, чем максимальная доплеровская частота цели. Периодически излучаемые зондирующие когерентные импульсы можно рассматривать как сумму гармонических составляющих с частотами fk = f0 + kFп, где f0 - несущая частота РЛС, a k - любое целое число. Каждая составляющая с частотой fk подобна непрерывному зондирующему сигналу, максимальное и минимальное доплеровское приращение частоты сигналов, отраженных от подстилающей поверхности, образуется как 2Vc/Ak и - 2Vc/Аk соответственно, где Аk = c/fk, а с - скорость распространения радиоволн. При этом, значение мощности доплеровского сигнала отражения от земли по каждой составляющей модулируется в соответствии с огибающей спектра зондирующих импульсов Sт. В результате этого спектр отраженного от земли доплеровского сигнала имеет вид, показанный на рис.4.
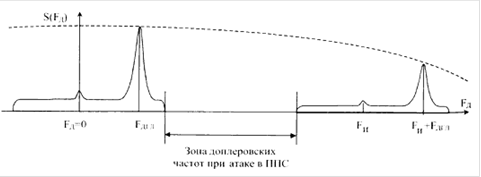
Рис.4
Для малых по сравнению с длиной волны и пологих неровностей применим метод возмущений (мелкомасштабная модель). Отраженная волна представляется в виде суммы волн от гладкой поверхности, определяемой коэффициентами отражения Френеля и обусловленной мелкими неровностями. Если радиус кривизны неровностей много больше длины волны (для плавных неровностей достаточно больших размеров), применим метод Кирхгофа (крупномасштабная модель). При этом отраженное поле вычисляется по законам геометрической оптики, т.е. так же, как при отражении от бесконечной касательной плоскости в данной точке поверхности. С учетом того, что в этой модели затенение одних участков поверхности другими отсутствует, можно воспользоваться коэффициентами отражения Френеля. При оценке участка гладкой поверхности, эффективно участвующего в формировании отраженного сигнала в сторону РЛС, можно воспользоваться зонами Френеля. Рассмотрим случай вертикального облучения земной поверхности. Метод построения зон ясен из рис.5.
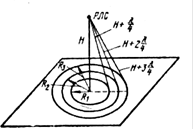
Рис.5
Для первой зоны разность хода лучей до центра зоны и до любой точки внутри зоны не превышает λ/4, что после отражения на границе зоны соответствует разности хода λ/2, т.е. фазовому сдвигу 180°. Остальные зоны строятся аналогично. Отсюда следует, что первая зона является кругом с радиусом:
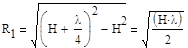
так как обычно H >> λ/4, где H - высота БРЛС над землей.
Что касается остальных зон, то они образуют кольца. Вторая зона имеет внутренний радиус R1 и внешний:

последующие радиусы равны:


и т.д. Так как площадь k-го кольца:

т.е. площади колец зон равны. Вследствие того, что сигналы, отраженные от этих зон, имеют разные знаки, происходит их взаимная частичная компенсация и результирующий отраженный сигнал соответствует приблизительно половине формируемого первой зоной Френеля, что и определяет главную роль этой зоны.
Приближенный расчет для высоты полета вертолета-носителя БРЛС равной 100м показывает, что ЭПР помехи от подстилающей поверхности составляет 18м2 при приеме помехи по боковым каналам.
Заполним закладку "Цель и помеха" (рис.6). "ЭПР цели кв. м" - 5 м (в соответствии с ТЗ). "Максимальная скорость цели, м/с" - 900 м/с (в соответствии с ТЗ). "ЭПР помехи" - 18 м2. "Ширина спектра флюктуаций, Гц" - 10000 Гц.
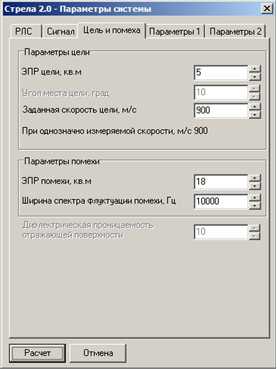
Рис.6
В закладке "Параметры 1" (рис.7) укажем "Мощность передатчика, кВт" - 5кВт, "Коэффициент усиления антенны" - 900, "Энергетическая дальность, км" - 30, "Разрешение по дальности, м" - 50, "Вероятность правильного обнаружения" - 0,95, "Вероятность ложной тревоги" - 10-5, "Потери при обработке, дБ" - 3.
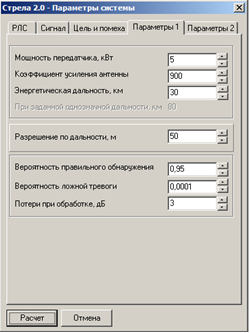
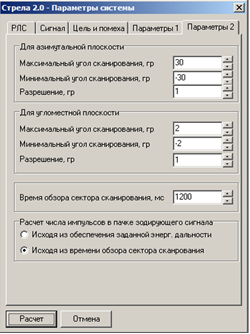
Рис.7
В закладке "Параметры 2" (рис.7) укажем для азимутальной плоскости: "Максимальный угол сканирования, гр." - 30, "Минимальный угол сканирования, гр." - (-30), "Разрешение, гр" - 1; для угломестной плоскости: "Максимальный угол сканирования, гр." - 2, "Минимальный угол сканирования, гр." - (-2), "Разрешение, гр" - 1; "Время обзора сектора сканирования, мс" - 1200 мс. Расчет числа импульсов в пачке зондирующего сигнала вести, исходя из времени обзора сектора сканирования.
Далее программа выдает расчет параметров РЛС, используя введенные ранее данные (рис.8)
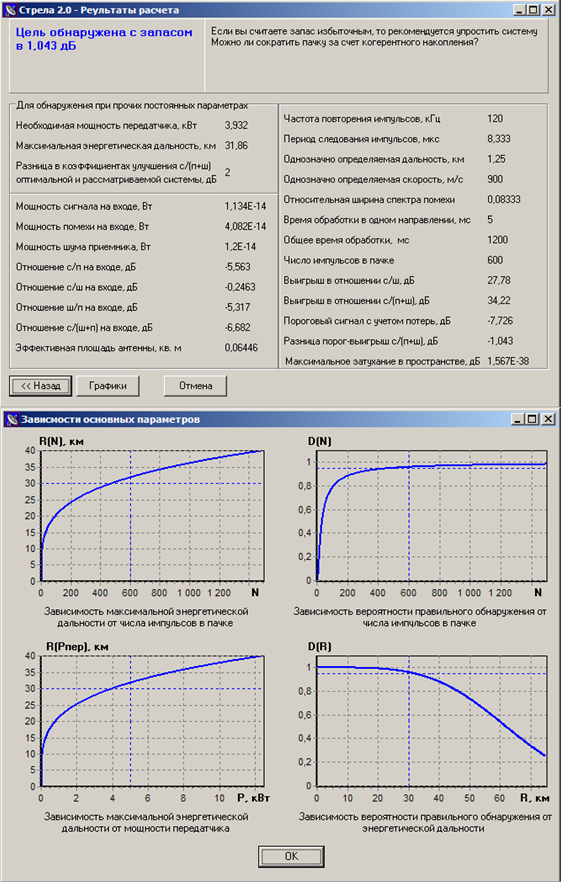
Рис.8
Из данных расчета программы "Стрела" можно видеть следующее:
o увеличение числа импульсов в пачке приводит к большему значению энергетической дальности, что можно объяснить непосредственной связью числа импульсов в пачке N с коэффициентом передачи сигнала kс (kс= N), который в свою очередь связан с энергетической дальностью R, причем чем больше kс, тем больше R;
o увеличение N приводит к повышению вероятности правильного обнаружения D, что согласуется с теорией;
o дальность связана с мощностью передатчика основным уравнением дальности радиолокации, согласно которому увеличение мощности приводит к возрастанию энергетической дальности;
o увеличение энергетической дальности приводит к уменьшению значения правильного обнаружения, связанно данное явление с тем, что на больших дальностях уменьшается мощность отраженного от цели зондирующего импульса, уменьшается разрешающая способность РЛС, больше сказывается совокупное влияние среды на распространяющуюся волну.
|
из
5.00
|
Обсуждение в статье: Анализ и формализация задачи |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы