 |
Главная |


Расчет параметров помехопостановщика
|
из
5.00
|
Рассмотрим алгоритм создания уводящей по скорости помехи для БРЛС с автосопровождением по скорости (АСС):
1) радиолокационный сигнал (импульсный или непрерывный) принимается, усиливается и ретранслируется в направлении подавляемой БРЛС;
2) мощный ретранслированный сигнал из-за действия АРУ вызывает уменьшение коэффициента усиления радиолокационного приемника, вследствие чего отраженный от цели сигнал подавляется, и строб скорости БРЛС захватывается сигналом помехи;
3) доплеровская частота переизлученного сигнала помехи последовательно меняется (уводится) в сторону увеличения или уменьшения относительно доплеровской частоты сигнала, отраженного от реальной цели. При этом возможны различные законы изменения частоты, но если производится одновременно увод по дальности, то производная функция изменения дальности должна быть равна во всех соответствующих точках значению функции уводящей помехи по скорости;
4) по достижении максимальной величины увода по скорости передатчик ретрансляционных помех выключается, вызывая срыв сопровождения цели. Отношение уровней сигналов при включенном и выключенном ретрансляторе должно быть таким, чтобы не позволить ГСН наводиться на собственные шумы, излучаемые передатчиком помех;
5) БРЛС переходит в режим перезахвата и начинает процесс поиска доплеровской частоты сигнала цели. При этом через некоторое время возможен либо повторный захват потерянного сигнала, либо захват сигналов от других целей, включая ложные. Во время поиска угломерная система размыкается или находится в режиме памяти по углам или угловой скорости;
6) процесс увода по скорости повторяется. Маневр самолета с максимальным ускорением повышает эффективность воздействия уводящей помехи по скорости.
Описанная последовательность создания уводящей по скорости помехи относится к обычному способу ее формирования. На рис.13 приведена структурная схема широко используемого передатчика уводящей по скорости помехи на основе ретранслятора со сдвигом частоты на ЛБВ. Для разделения принятого сигнала и сигнала помехи используется циркулятор, но он не обеспечивает достаточной развязки для устранения самовозбуждения. Поэтому принятый и выходной сигналы помехи попеременно стробируются таким образом, чтобы исключить одновременную передачу и прием. Хотя радиолокационный приемник будет принимать ретрансляционный сигнал помехи в течение менее чем 50% времени, эффективное воздействие помехи все же будет обеспечено. Так как стробированный высокочастотный сигнал должен накапливаться для последующей передачи, то необходимо использовать в тракте линию задержки.
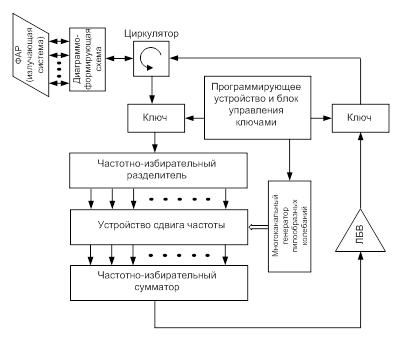
Рис.13
Задержка сигналов должна быть когерентной и достаточной величины, что может потребовать применения преобразования частоты входных сигналов в диапазон промежуточных частот для реализации требуемой задержки. Можно обойтись без введения дополнительной задержки, а использовать запаздывание в ЛБВ и тракте. Пилообразное колебание, управляемое по частоте, подается на спираль ЛБВ с амплитудой, достаточной для получения в ретранслируемом радиолокационном сигнале изменения фазы на 2π рад. Для успешной работы передатчика такая установка амплитуды пилообразного колебания оказывается допустимой в 20 % -ной частотной полосе. Однако подавление остатка сигнала на несущей частоте радиолокационного сигнала должно быть тщательно проверено, так как если уровень сигнала на выходе ЛБВ на несущей частоте входного сигнала оказывается больше уровня радиолокационного сигнала, отраженного от цели, то передатчик помех будет действовать как маяк. Если сигнал помехи превышает остаток на несущей частоте сигнала на 6 дБ или больше, то строб скорости РЛС будет захватываться и уводиться помехой. Обычно коэффициент подавления в диапазоне частот лежит в пределах 10.20 дБ.
В системе сдвига частоты всегда существует начальная (не нулевая) доплеровская частота. В лучшем случае эта начальная частота достигает 20Гц. Для практики важно, чтобы эта начальная частота составляла не более 25% величины разрешающей способности РЛС по скорости. Время действия сигнала помехи на несущей частоте необходимо лишь для того, чтобы воздействовать на систему АРУ подавляемого радиолокационного приемника, и оно обычно составляет доли секунды. Закон изменения частоты обычно линейный, но также возможен параболический или модифицированный экспоненциальный закон. Имитируемое помехой ускорение не должно быть значительным, поскольку РЛС может автоматически сбросить сигнал уводящей по скорости помехи, используя пороговый алгоритм по ускорению, описанный выше. При уводе по скорости изменение на 20 кГц за 5 с соответствует примерно ускорению примерно 5 g. После окончания цикла постановки уводящей по скорости помехи передатчик кратковременно выключается, а затем цикл постановки помехи повторяется. Если радиолокационный сигнал после действия уводящей по скорости помехи больше не принимается, то уводящая помеха по скорости может не создаваться до тех пор, пока не появится другой радиолокационный сигнал.
Может также использоваться последовательное соединение, когда данный входной сигнал сдвигается по частоте более чем один раз. Выходные сигналы всех каналов суммируются, усиливаются и излучаются в направлении подавляемого радиолокатора. Возможны девять основных вариантов программ создания помех по скорости, однако, когда они видоизменяются и используются в комбинации, число режимов становится еще большим:
1) программа представляет собой обычную уводящую помеху по скорости, когда увод может совершаться либо вверх, либо вниз по частоте.
2) эта программа является вариантом программы 1), когда максимальная величина увода по скорости сохраняется сравнительно длительное время.
3) множество подпрограмм уводящей помехи по скорости, создаваемых на основе временного разделения, используя для этого только одно устройство сдвига частоты, или на основе распределения по модности, используя много устройств сдвига частоты.
4) программа использует фазовую модуляцию пилообразным сигналом со случайной частотой, чтобы спектр выходного сигнала помехи был подобен спектру при частотной модуляции шумами и сосредоточен в пределах диапазона доплеровских частот радиолокатора (скорости). В качестве модулирующего по фазе сигнала может применяться неограниченный или ограниченный по амплитуде процесс, включая псевдослучайный. Отметим, что этот вид шумовой помехи следует за перестройкой несущей частоты сигнала подавляемого радиолокатора и может производить большие спектральные плотности мощности, например, 100 кВт/МГц.
5) программа создает одну или много фиксированных доплеровских частот, которые могут мерцать и образовывать цели с ложной скоростью в системе поиска РЛС противника по скорости. Это может осуществляться с помощью псевдослучайных последовательностей.
6) программа создает две фиксированные частоты, которые переключаются во времени (включаются и выключаются) с постоянной частотой, равной частоте скрытого конического сканирования подавляемого радиолокатора сопровождения, или с переменной частотой, близкой к ней. При этом получается такой эффект, как и при воздействии амплитудно-модулированной помехи с перестраиваемой частотой сигнала модуляции.
7) Программа 7 является простой разновидностью программы 5. Если в определенных границах поддерживается постоянной радиальная скорость цели относительно позиции ЗРК, то фиксированное смещение частоты вниз может перевести отраженный от цели сигнал в область помех от местных предметов или в область близких к нулевым доплеровским частотам.
8) Программа 8 отчасти подобна программе I, за исключением того, что в данном случае отсутствует временной участок приостановки вблизи доплеровской частоты радиолокационного сигнала.
9) Программа 9 применятся для радиоэлектронного подавления импульсных радиолокаторов со сжатием, использующих ЧМ или ФКМ путем изменения внутриимпульсной структуры.
Произведем расчет необходимой мощности на входе подавляемой БРЛС, для постановщика помех, при этом учтем, что постановщик помех работает по боковым лепесткам. Следует отметить, что дальность от постановщика до БРЛС и от БРЛС до цели равны, так как постановщик расположен на борту противника.
| Расчет мощности передатчика АП, необходимой для создания на входе РЛС отношения (помеха/сигнал) =3 |
Исходные данные














Мощность постановщика помех выберем равной 3 кВт, что вполне хватит для того, чтобы АП, поступающая на приемник РЛС была достаточно мощной.
|
из
5.00
|
Обсуждение в статье: Расчет параметров помехопостановщика |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы