 |
Главная |


Расчет параметров и выбор двигателя
|
из
5.00
|
Определяем среднеквадратичное значение момента нагрузки по [1]:
 , (4.1)
, (4.1)
где: М1, М2 – момент на каждом участке графика нагрузочной диаграммы;
t1, t2 – промежутки времени в течение которых прикладываются моменты М1, М2;
Тц – время цикла.
Тогда по (4.1):
 .
.
Определим среднее значение момента за цикл работы по [3]:
 . (4.2)
. (4.2)
Тогда по (4.2):
 .
.
Расчетный номинальный момент двигателя [1]:
 . (4.3)
. (4.3)
Тогда по (4.3):
 Н*м.
Н*м.
Условия выбора двигателя ковочной машины:
– по режиму работы (режим работы длительной);
– по скорости (wдв = wр.дв = 201,68 рад/с);
– по нагреву (Мном.дв. ³ Мн.р);
– с учетом номинального скольжения (Sном ³ Sн.р);
– по условиям окружающей среды.
Необходимое расчетное скольжение привода [4]:
Sпр.расч = Sном.р + Sдоп, (4.4)
где: Sпр.расч – требуемое номинальное скольжение привода (Sпр.расч. = 0,08¸0,05 по [4] для 15 < n < 50 ходов в минуту рабочего органа);
Sдоп – дополнительное скольжение (принимаем Sдоп = 0,01¸0,03 для ременной передачи);
Sном.р – номинальное расчетное скольжение двигателя:
Sном.р = Sпр.расч – Sдоп. = 0,05 – 0,03 = 0,02. (4.5)
Выбираем двигатель из условия окружающей среды в закрытом обдуваемом исполнении со степенью защиты не менее IP44, поскольку большинство приводов ковочных машин работает в условиях вибрации и ударов, повышенных температур и др. вредных условий.
Так как, в [5] максимальная мощность асинхронного двигателя с кз ротором с повышенным скольжением серии 4А не более 50 кВт, а нам требуется двигатель с мощностью порядка 300 кВт, то необходимо выбрать двигатель серии АОС3:
AОC3 315 2У режима работы S1 (длительный). Его параметры:
Рн = 160 кВт;
Sн = 2,1%;
n0 = 3000 об/мин;
Uн = 380/660 В;
h = 0,92;
cosj = 0,9;
IП/IН = 7;
ММАХ/MН = 2;
МП/MН = 1;
R1 = 0,020;
R’2 = 0,017;
Jдв = 10 кг*м2;
SK = 5,6%.
Номинальный момент двигателя по [3]:
 , (4.6)
, (4.6)
где: Рн – номинальная мощность двигателя, Вт;
wн – номинальная угловая скорость двигателя, рад/с.
Скорость холостого хода:
w0 = p*n0/30 = 3,14159*3000/30 = 314,159 рад/с. (4.7)
Тогда по (4.7):
wн = w0*(1 – Sн) = 314,159*(1 – 0,021) = 307,562 рад/с. (4.8)
Тогда по (4.6):
МН = 160000/307,562 = 520,221 Н*м < 895,559 Н*м.
Однако даже этот двигатель (самый мощный асинхронный двигатель с повышенным скольжением) не обеспечит требуемый момент. Тогда поставим не один, а два одинаковых двигателя (смотри расчёты далее). Причём, оба двигателя приводят во вращательное движение один вал, на котором находится шкив ременной передачи, через дифференциал (конический редуктор, у которого две шестерни и одно колесо). Схема дифференциала с двумя двигателями приведена на рисунке 4.1.
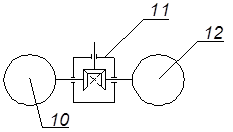
10 – Первый АД с КЗ с повышенным скольжением;
11 – Дифференциал;
10 – Второй АД с КЗ с повышенным скольжением.
Рисунок 4.1 – Схема дифференциала с двумя двигателями
Таким образом, мы ставим два одинаковых двигателя АОС3 315 2У и соединяем их со шкивом через механический дифференциал (конический редуктор), причём в нашем случае принимаем передаточное отношение i = 1. В этом случае:
 М∑ = М1 + М2;
М∑ = М1 + М2;
(4.9)
щ∑ = (щ1 ± щ2)/2,
где: М1 – момент, развиваемый первым двигателем;
М2 – момент, развиваемый вторым двигателем;
щ1 – угловая скорость вращения первого двигателя;
щ2 – угловая скорость вращения второго двигателя;
щ∑ – угловая скорость вращения колеса редуктора.
Причём во втором выражении системы (4.9) знак «+» ставится в том случае, если двигатели вращаются в разных направлениях (в нашем случае необходимо сделать именно так), а знак «–» – если двигатели вращаются в одном направлении.
Кроме того, применение двух двигательного электропривода приведёт к уменьшению момента инерции привода в среднем на 5 – 8%, что, в свою очередь, приведёт к уменьшению потерь в переходных процессах (в нашем случае при пуске).
Таким образом, момент номинальный:
МН = 520,221 + 520,221 = 1040,442 Н*м > 895,559 Н*м.
Определяем момент инерции привода, требуемый для сглаживания максимального момента по [1]:
 , (4.10)
, (4.10)
где: b – жесткость механической характеристики;
mк – кратность максимального момента к номинальному.
Жесткость механической характеристики одного двигателя:
 , (4.11)
, (4.11)
где: МН – момент, развиваемый двумя двигателями;
SH – номинальное скольжение двигателя;
щ0 – скорость холостого хода двигателя.
Тогда по (4.11):
 .
.
А суммарная жесткость механической характеристики:
 .
.
И по (4.10):
 кг*м2.
кг*м2.
Применяем момент инерции конического редуктора, шкива, редуктора, кривошипно-шатунного механизма приведенного к валу двигателя 0,5*Jдв. Момент инерции маховика, приведенного к валу двигателя:
J'маховика = JПР∑ – 2*Jдв – 0,5Jдв. (4.12)
Тогда по (4.12):
J'маховика = 136,874 – 2*10 – 0,5*10 = 111,874 кг*м2.
Момент инерции маховика найдём по формуле:
J маховика = J'маховика/r2, (4.13)
где: r – относительное плечо крутящего момента.
Тогда по (4.13):
J маховика = J'маховика/r2 = 111,874/0,22 = 2796,85 кг*м2.
|
из
5.00
|
Обсуждение в статье: Расчет параметров и выбор двигателя |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы