 |
Главная |


Расчет переходных процессов в электроприводе за цикл работы
|
из
5.00
|
В диапазоне изменения скольжения S от 0 до Sк механическая характеристика может быть лимитирована, поэтому переходные процессы можно описать системой дифференциальных уравнений из [7]:


 (6.1)
(6.1)
где: М, Мс – момент двигателя и нагрузки;
Тэ – электромагнитная постоянная времени;
b – жесткость МХ привода;
J – момент инерции привода.
Электромагнитная постоянная времени:
 . (6.2)
. (6.2)
Тогда по (6.2):
 с.
с.
Механическая постоянная времени привода по [7]:
ТМ = JПР/b. (6.3)
где: b – жесткость МХ привода, рассчитанная в пункте (4.1).
Тогда по (6.3):
ТМ = 136,874/315,412 = 0,434 с.
Т. к. ТМ >> ТЭ, то систему уравнений (6.1) можно заменить на систему, где ТЭ пренебрегаем (ТЭ = 0):

 (6.4)
(6.4)
Решение системы уравнений (6.4) даёт искомые зависимости щ = f(t), M = f(t) по [7]:
 (6.5)
(6.5)
 (6.6)
(6.6)
где: МУСТ, щУСТ – установившиеся значения момента и скорости при t → oo;
МНАЧ, щНАЧ – начальные значения момента и скорости при t = 0.
На первом участке работы:
МНАЧ1 = МСMIN = 252,931 Н*м.
Из второго уравнения системы (6.4):
 рад/с;
рад/с;
 Н*м;
Н*м;
 рад/с;
рад/с;

 (6.7)
(6.7)

На втором участке работы:
МНАЧ2 = 2080,807 Н*м.
Из второго уравнения системы (6.4):
 рад/с;
рад/с;
 Н*м;
Н*м;
 рад/с;
рад/с;

 (6.8)
(6.8)

Результаты расчёта переходных процессов проиллюстрированы на рисунках 6.1 и 6.2 – графики изменения скорости и момента, соответственно. Кроме того, некоторые числовые значения расчёта переходных процессов сведены в таблицах 6.1 и 6.2 – результаты расчета переходных процессов на первом и на втором участках, соответственно.
Графики переходных процессов приведены также в графической части проекта.

Рисунок 6.1 – График изменения скорости
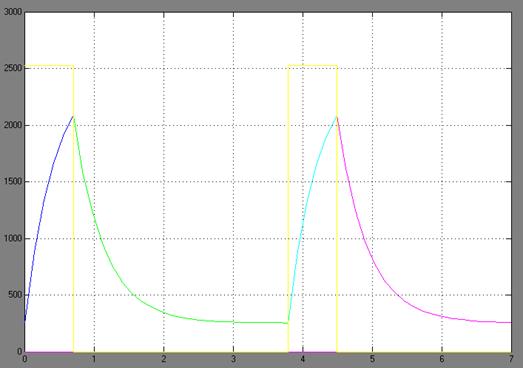
Рисунок 6.2 – График изменения момента
Таблица 6.1 – Результаты расчета переходных процессов на первом участке
| t, с | 0 | 0,05 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,705 |
| щ1, рад/с | 205,2 | 204,4 | 203,7 | 202,5 | 201,6 | 200,9 | 200,3 | 199,8 | 199,4 |
| М1, Н*м | 252,9 | 500,6 | 721,4 | 1093,5 | 1388,9 | 1623,6 | 1810 | 1958 | 2080,8 |
Таблица 6.2 – Результаты расчета переходных процессов на втором участке
| t, с | 0 | 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 2,0 | 2,5 | 3,084 |
| щ2, рад/с | 199,4 | 201,5 | 202,9 | 203,7 | 204,3 | 204,6 | 205,1 | 205,2 | 205,2 |
| М2, Н*м | 2080,8 | 1405,9 | 980,2 | 711,6 | 542,3 | 435,4 | 271,1 | 258,7 | 253,0 |
Проверка правильности расчета мощности и окончательный выбор двигателя
Проверку правильности расчета и выбор двигателя по нагреву осуществляется методом эквивалентного момента, используя график переходного процесса M(t) по [1]. Произведем разбиение графика M(t) на небольшие прямоугольные участки и определим Mэ:
 (7.1)
(7.1)
где: Mi, ti – момент и время работы на i – ом прямоугольном участке;
Тц – время цикла.
Разобьём первый участок на три интервала и определим значения моментов М1(t1) по (6.7). Причём t1 = 0,705/3 = 0,235 с.
Тогда:
М1(0,235) = 1204,709 Н*м;
М1(0,47) = 1758,539 Н*м;
М1(0,705) = 2080,8 Н*м.
Затем разобьём второй участок на четыре интервала и определим значения моментов М2(t2) по (6.8). Причём t2 = (3,789 – 0,705)/4 = 0,771 с.
М2(0,771) = 562,262 Н*м;
М2(1,542) = 305,279 Н*м;
М2(2,313) = 261,790 Н*м;
М2(3,084) = 253,0 Н*м.
Следовательно:
 (7.2)
(7.2)
Тогда, подставляя значение найденное в (7.2), в (7.1), получим:

Таким образом, двигатели привода загружены на:

Т. е. двигатели по мощности выбраны верно и загружены на 82,9% по нагреву.
Заключение
В ходе выполнения курсового проекта был выбран тип привода и разработан привод горизонтально – ковочной машины.
При выборе типа привода были учтены особенности работы привода:
– ударный тип нагрузки;
– большие колебания нагрузки.
При прямом выборе двигателя мощность должна выбираться из условия обеспечения пикового момента нагрузки Мс.max, поэтому двигатель не полностью используется по нагреву.
В качестве привода был выбран маховиковый привод на основе асинхронного двигателя с короткозамкнутым ротором с повышенным скольжением, что позволяет:
– устранить завышение мощности электродвигателя;
– снизить для двигателя нежелательные толчки и моменты.
|
из
5.00
|
Обсуждение в статье: Расчет переходных процессов в электроприводе за цикл работы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы