 |
Главная |


Выбор комплектного электропривода
|
из
5.00
|
Выбор комплектного электропривода .
При выборе комплектного электропривода исходят из того, что наиболее слабым звеном энергетического канала электропривода является двигатель.
В общем случае преобразователь выбирают по номинальным значениям тока и напряжения выбранного двигателя с учетом перегрузок преобразователя в переходных режимах. Поэтому при выборе комплектного электропривода переменного тока ориентируются на два основных условия:  .
.
Выбираем преобразователь частоты фирмы Sinamics S120 6SL3330-1TE34-2AA0
Технические данные приведены в таблице № 1
Таблица 1
| Номинальный ток, А | |
| Номинальная мощность, кВт | |
| Номинальное напряжение, В | |
| Степень защиты | IP00 |
На рис. 9.1 представлен пример функциональной схемы системы векторного частотного управления электропривода с отрицательной обратной связью по реальной скорости АД. Система имеет два основных канала управления — угловой скоростью  и модулем потокосцепления ротора
и модулем потокосцепления ротора  АД, а также два подчиненных им внутренних контура регулирования составляющих тока статора I1х и I1y в осях х и у ортогональной системы координат, вращающейся с синхронной скоростью магнитного поля двигателя.
АД, а также два подчиненных им внутренних контура регулирования составляющих тока статора I1х и I1y в осях х и у ортогональной системы координат, вращающейся с синхронной скоростью магнитного поля двигателя.
Сигнал задания скорости АД предварительно поступает на вход задатчика интенсивности ЗИ, формирующего на выходе два сигнала управления. Основной сигнал определяет задание скорости АД с темпом, обеспечивающим ограничение рывков и ускорений в соответствии с технологическими требованиями к электроприводу и максимально допустимыми динамическими перегрузками по току и электромагнитному моменту АД. Дополнительный сигнал  определяет с учетом коэффициента передачи
определяет с учетом коэффициента передачи  пропорционального приведенному к валу АД результирующему моменту инерции двигателя, задание динамической составляющей электромагнитного момента Мдин. В результате его суммирования в сумматоре
пропорционального приведенному к валу АД результирующему моменту инерции двигателя, задание динамической составляющей электромагнитного момента Мдин. В результате его суммирования в сумматоре  с сигналом Мс, пропорциональным статическому моменту сил сопротивления на валу АД, формируется сигнал задания электромагнитного момента АД Мз.р. При этом определение реального сигнала Мс и практическая реализация задания электромагнитного момента требуют наличия датчика статического момента на валу АД.
с сигналом Мс, пропорциональным статическому моменту сил сопротивления на валу АД, формируется сигнал задания электромагнитного момента АД Мз.р. При этом определение реального сигнала Мс и практическая реализация задания электромагнитного момента требуют наличия датчика статического момента на валу АД.
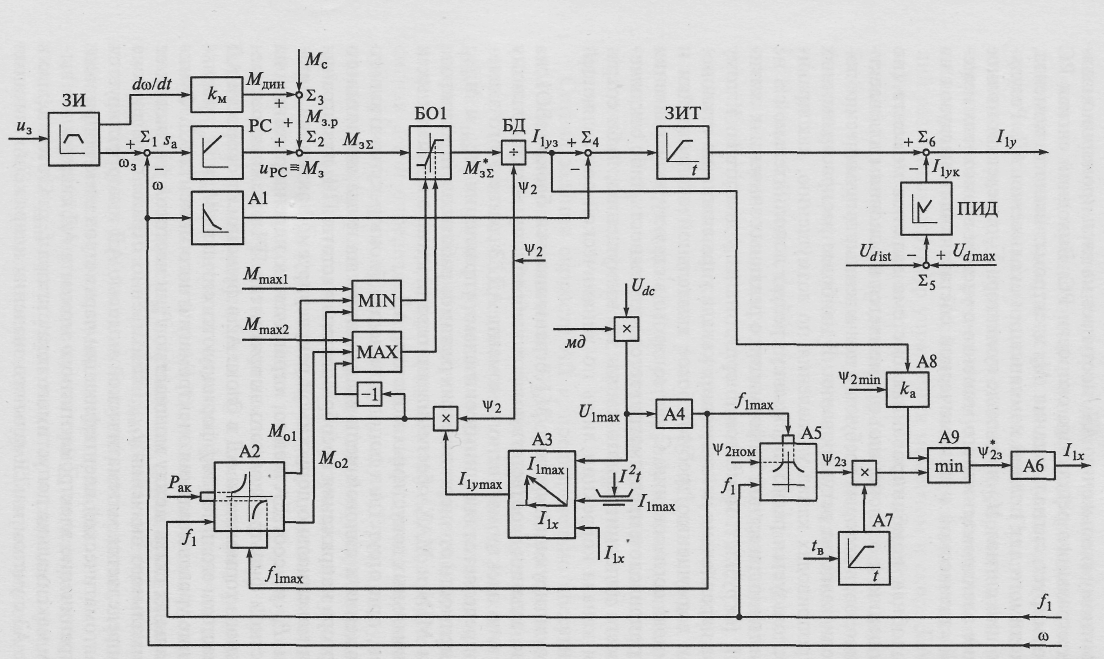
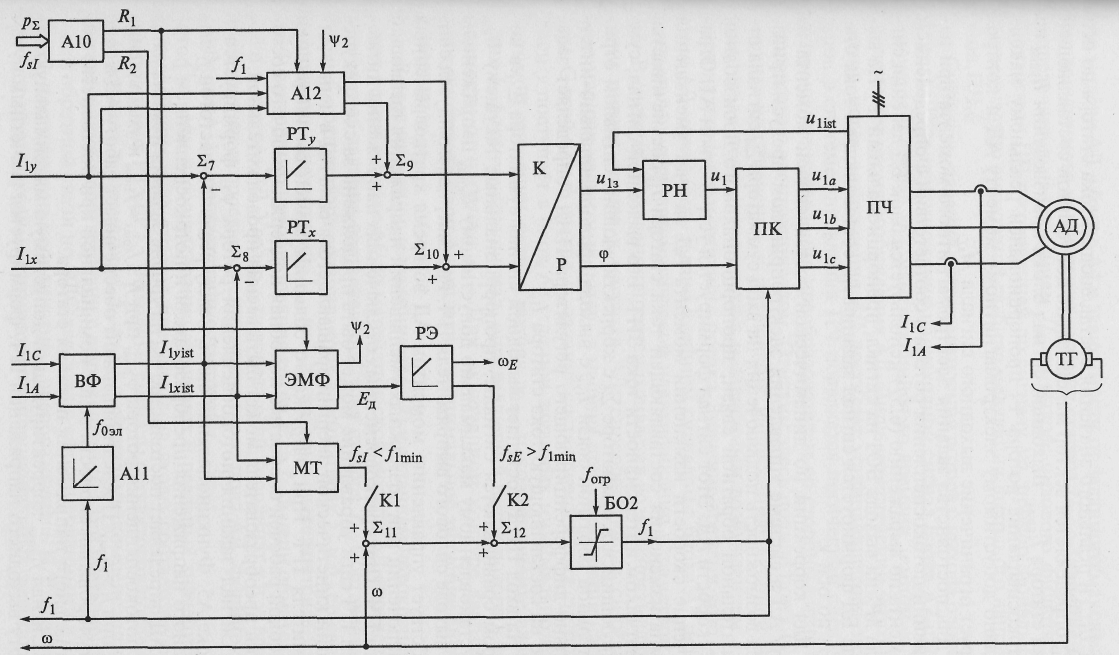
Рис. 9.1 Функциональная схема системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Однако техническая сложность, заметные метрологические погрешности существующих датчиков статического момента на вращающихся валах электрических машин и отсутствие серийного их выпуска, как правило, ограничивают их применение в системах электропривода.
Появляющийся на выходе сумматора  сигнал рассогласования
сигнал рассогласования  основного сигнала управления и сигнала реальной скорости АД с выхода тахогенератора ТГ, пропорциональный абсолютному скольжению АД, поступает на вход пропорционально-интегрального регулятора скорости РС. Выходной сигнал РС ирс формирует сигнал задания Мз электромагнитного момента, необходимого для полной компенсации скольжения АД. Результирующий сигнал
основного сигнала управления и сигнала реальной скорости АД с выхода тахогенератора ТГ, пропорциональный абсолютному скольжению АД, поступает на вход пропорционально-интегрального регулятора скорости РС. Выходной сигнал РС ирс формирует сигнал задания Мз электромагнитного момента, необходимого для полной компенсации скольжения АД. Результирующий сигнал  на выходе сумматора
на выходе сумматора  определяет полное задание электромагнитного момента с учетом возможных изменений статической и динамической составляющих нагрузок на валу АД.
определяет полное задание электромагнитного момента с учетом возможных изменений статической и динамической составляющих нагрузок на валу АД.
Подобная комбинированная система задания момента (по возмущению и отклонению) применяется в основном для электроприводов, в которых требуются повышенные динамические показатели качества регулирования. В наиболее распространенных электроприводах канал управления по возмущению, как правило, используется редко, поскольку требует дополнительной и не всегда точно известной информации о реальных значениях статической нагрузки и моментов инерции на валу двигателя. К тому же два параллельно действующих канала управления по отклонению и возмущению требуют более тщательной их настройки и взаимного согласования. С учетом этого в структурах управления электроприводом предусматривается возможность либо отключения всего дополнительного канала по возмущению, либо сохранения канала коррекции, лишь по динамической составляющей момента.
Результирующий сигнал  ограничивается блоком БО1 на уровне задания, соответствующего выбранному максимальному значению электромагнитного момента АД. Задание этого значения определяется внешними сигналами управления
ограничивается блоком БО1 на уровне задания, соответствующего выбранному максимальному значению электромагнитного момента АД. Задание этого значения определяется внешними сигналами управления  и
и  . В зависимости от энергетических режимов работы электропривода блоки MIN и МАХ обеспечивают ограничение минимальных и максимальных допустимых моментов АД.
. В зависимости от энергетических режимов работы электропривода блоки MIN и МАХ обеспечивают ограничение минимальных и максимальных допустимых моментов АД.
Так, при отсутствии дополнительного блока рекуперативного торможения в силовой цепи выпрямителя на входе автономного инвертора напряжения преобразователя частоты ПЧ, для ограничения максимально допустимой рекуперируемой активной мощности Рак и, соответственно, ограничения перенапряжения на емкостном фильтре входного выпрямителя ПЧ в режиме рекуперативного торможения АД в блоке А2 в функции от скорости АД или частоты его питания  формируются сигналы Мо1 и Мо2, уменьшающие уровень задания электромагнитного момента АД. Функциональная связь между мощностью Рак и частотой с учетом ее максимального значения
формируются сигналы Мо1 и Мо2, уменьшающие уровень задания электромагнитного момента АД. Функциональная связь между мощностью Рак и частотой с учетом ее максимального значения  , качественно отраженная в блоке А2, определяется математической моделью АД и корректируется при автоматической идентификации параметров электропривода.
, качественно отраженная в блоке А2, определяется математической моделью АД и корректируется при автоматической идентификации параметров электропривода.
Ограничение электромагнитного момента АД связано и с выбором максимально допустимого тока статора  . С этой целью в блоке АЗ с учетом максимального значения напряжения питания АД
. С этой целью в блоке АЗ с учетом максимального значения напряжения питания АД  и реального значения составляющей тока статора по оси х I1х определяется вектор максимально допустимой составляющей тока статора
и реального значения составляющей тока статора по оси х I1х определяется вектор максимально допустимой составляющей тока статора  .
.
Выходной сигнал блока произведения на потокосцепление ротора  пропорционален реальному максимально допустимому электромагнитному моменту АД и контролирует ограничение выходного сигнала .
пропорционален реальному максимально допустимому электромагнитному моменту АД и контролирует ограничение выходного сигнала .
Для постоянства задания электромагнитного момента при изменении потокосцепления ротора в соответствии с определением момента используется блок БД деления сигнала  на выходе БО1 на сигнал, пропорциональный . На выходе БД формируется сигнал задания
на выходе БО1 на сигнал, пропорциональный . На выходе БД формируется сигнал задания  составляющей тока статора по оси у.
составляющей тока статора по оси у.
Сигнал задания потокосцепления ротора  формируется в блоке А5. Функциональная связь между реальной частотой выходного напряжения преобразователя и потокосцеплением ротора АД определяет постоянство на уровне задания номинального потокосцепления ротора.
формируется в блоке А5. Функциональная связь между реальной частотой выходного напряжения преобразователя и потокосцеплением ротора АД определяет постоянство на уровне задания номинального потокосцепления ротора.
Сигнал  , корректирующий допустимую максимальную частоту выходного напряжения ПЧ, формируется расчетным путем по модели АД в блоке А4 в зависимости от заданного максимально допустимого напряжения питания статора
, корректирующий допустимую максимальную частоту выходного напряжения ПЧ, формируется расчетным путем по модели АД в блоке А4 в зависимости от заданного максимально допустимого напряжения питания статора  . Значение определяется напряжением
. Значение определяется напряжением  на выходе силового фильтра выпрямителя ПЧ с коррекцией по сигналу мд, пропорциональному максимально возможной глубине модуляции выходного напряжения ПЧ.
на выходе силового фильтра выпрямителя ПЧ с коррекцией по сигналу мд, пропорциональному максимально возможной глубине модуляции выходного напряжения ПЧ.
Сигнал задания потокосцепления ротора с выхода блока А5 в результате перемножения на выходной сигнал блока А7 преобразуется в сигнал  , изменяющийся во времени темпом, определяющим время возбуждения АД. Лишь по истечении этого времени, когда возбуждение АД достигает установившегося значения, в системе управления ПЧ появляется логический сигнал на разрешение управления преобразователем со стороны сигнала и3 управления электроприводом. Отметим здесь полное подобие условию подключения к питающему напряжению якорной цепи двигателя постоянного тока с независимым возбуждением лишь при наличии его магнитного потока. Значение времени возбуждения АД может быть задано внешним сигналом
, изменяющийся во времени темпом, определяющим время возбуждения АД. Лишь по истечении этого времени, когда возбуждение АД достигает установившегося значения, в системе управления ПЧ появляется логический сигнал на разрешение управления преобразователем со стороны сигнала и3 управления электроприводом. Отметим здесь полное подобие условию подключения к питающему напряжению якорной цепи двигателя постоянного тока с независимым возбуждением лишь при наличии его магнитного потока. Значение времени возбуждения АД может быть задано внешним сигналом  блока А7 или же определено при автоматической идентификации параметров АД.
блока А7 или же определено при автоматической идентификации параметров АД.
В системе управления предусматривается возможность адаптации потока ротора к нагрузке АД, способствующая снижению суммарных магнитных потерь в машине при уменьшении нагрузки. С этой целью сигнал задания составляющей тока статора по оси у поступает в блок А8, где при заданных минимально допустимом значении потока ротора  и коэффициенте адаптации
и коэффициенте адаптации  формируется сигнал, определяющий поток ротора в зависимости от нагрузки АД. При включенном контуре адаптации потока ротора блок А9 выделяет минимальное значение сигнала задания .
формируется сигнал, определяющий поток ротора в зависимости от нагрузки АД. При включенном контуре адаптации потока ротора блок А9 выделяет минимальное значение сигнала задания .
В соответствии с заданием потокосцепления ротора в блоке А6 по математической модели АД определяется сигнал задания составляющей тока статора  . Составляющие
. Составляющие  и тока статора сравниваются в сумматорах
и тока статора сравниваются в сумматорах  и
и  со своими текущими значениями
со своими текущими значениями  и
и  , которые выделяются в блоке ВФ векторного преобразования токов
, которые выделяются в блоке ВФ векторного преобразования токов  и
и  в цепи обмоток фаз А и С статора АД. Угол
в цепи обмоток фаз А и С статора АД. Угол  поворота осей координат х и у, вращающихся со скоростью электромагнитного поля АД, формируется в блоке А11 в соответствии с частотой .
поворота осей координат х и у, вращающихся со скоростью электромагнитного поля АД, формируется в блоке А11 в соответствии с частотой .
Сигналы рассогласования задающих и реальных значений составляющих тока статора поступают на входы соответствующих регуляторов РТх и РТy. Выходные сигналы регуляторов после суммирования в сумматорах  и
и  с сигналами компенсации составляющих и учета внутренней обратной связи по ЭДС двигателя, сформированными в блоке А12, поступают на координатный преобразователь К/Р. В зависимости от его входных сигналов, пропорциональных заданию составляющих выходного напряжения преобразователя в осях х, у, на выходе К/Р формируются сигналы
с сигналами компенсации составляющих и учета внутренней обратной связи по ЭДС двигателя, сформированными в блоке А12, поступают на координатный преобразователь К/Р. В зависимости от его входных сигналов, пропорциональных заданию составляющих выходного напряжения преобразователя в осях х, у, на выходе К/Р формируются сигналы  и
и  , определяющие соответственно амплитуду и фазу вектора напряжения в двухфазной системе координат
, определяющие соответственно амплитуду и фазу вектора напряжения в двухфазной системе координат  ,
,  , неподвижной относительно статора АД. Регулятор напряжения РН, на входе которого сравниваются сигналы задания и реального значения напряжения
, неподвижной относительно статора АД. Регулятор напряжения РН, на входе которого сравниваются сигналы задания и реального значения напряжения  на выходе выпрямителя ПЧ, обеспечивает стабилизацию выходных напряжений последнего. Сигналы задания выходного напряжения преобразователя
на выходе выпрямителя ПЧ, обеспечивает стабилизацию выходных напряжений последнего. Сигналы задания выходного напряжения преобразователя  и совместно с сигналом , определяющим частоту выходного напряжения ПЧ, трансформируются в преобразователе координат ПК в эквивалентные сигналы
и совместно с сигналом , определяющим частоту выходного напряжения ПЧ, трансформируются в преобразователе координат ПК в эквивалентные сигналы  ,
,  ,
,  трехфазной системы координат, определяющие выходные напряжения ПЧ.
трехфазной системы координат, определяющие выходные напряжения ПЧ.
Формирование сигнала задания частоты выходных напряжений ПЧ обеспечивается суммированием в сумматорах  и
и  сигнала
сигнала  реального значения скорости АД, поступающего с тахогенератора ТГ, и сигналов
реального значения скорости АД, поступающего с тахогенератора ТГ, и сигналов  ,
,  , определяющих частоту скольжения АД соответственно в функции тока и ЭДС двигателя. Вычисление осуществляется в блоке МТ математической модели двигателя по току, на вход которого совместно с текущими значениями и составляющих тока статора в осях х, у подается сигнал
, определяющих частоту скольжения АД соответственно в функции тока и ЭДС двигателя. Вычисление осуществляется в блоке МТ математической модели двигателя по току, на вход которого совместно с текущими значениями и составляющих тока статора в осях х, у подается сигнал  пропорциональный сопротивлению ротора АД.
пропорциональный сопротивлению ротора АД.
В блоке ЭФМ математической модели АД, на вход которого кроме текущих значений и составляющих тока статора поступает сигнал  , пропорциональный результирующему сопротивлению цепи статора, формируются два выходных сигнала —
, пропорциональный результирующему сопротивлению цепи статора, формируются два выходных сигнала —  , определяющий потокосцепление ротора, и
, определяющий потокосцепление ротора, и  , пропорциональный ЭДС двигателя.
, пропорциональный ЭДС двигателя.
На выходе ПИ-регулятора ЭДС двигателя (блок РЭ) формируются два сигнала (см. рис. 2.2) —  , пропорциональный частоте вращения ротора, и
, пропорциональный частоте вращения ротора, и  , определяющий коррекцию задания частоты .
, определяющий коррекцию задания частоты .
В системе управления с помощью ключей К1 и К2 реализуется логика управления, обеспечивающая раздельную подачу сигналов и на входы и в зависимости от заданной частоты выходного напряжения ПЧ. При малых частотах  , когда замкнут ключ К1 и разомкнут ключ К2, действует контур коррекции по току, обеспечивающий компенсацию падения напряжения на сопротивлении статора. При больших частотах
, когда замкнут ключ К1 и разомкнут ключ К2, действует контур коррекции по току, обеспечивающий компенсацию падения напряжения на сопротивлении статора. При больших частотах  , когда замкнут и ключ К2, дополнительно действует контур коррекции по ЭДС двигателя, обеспечивающий стабилизацию скорости АД. Выбор частоты
, когда замкнут и ключ К2, дополнительно действует контур коррекции по ЭДС двигателя, обеспечивающий стабилизацию скорости АД. Выбор частоты  , при которой переключаются контуры коррекции, определяется экспериментально по аналогии с настройкой соотношения
, при которой переключаются контуры коррекции, определяется экспериментально по аналогии с настройкой соотношения  в разомкнутых структурах скалярного управления АД. Максимально допустимая частота выходного напряжения ПЧ ограничивается сигналом
в разомкнутых структурах скалярного управления АД. Максимально допустимая частота выходного напряжения ПЧ ограничивается сигналом  блока БО2.
блока БО2.
Сигналы и формируются в блоке А10 тепловой модели АД, в которой поступает совокупность сигналов  , включающих в себя информацию о сопротивлениях цепи статора и ротора, определенных при автоматической идентификации параметров двигателя, степени влияния на них температуры собственно двигателя и окружающей среды, условий охлаждения двигателя, о наличии выходных фильтров преобразователя.
, включающих в себя информацию о сопротивлениях цепи статора и ротора, определенных при автоматической идентификации параметров двигателя, степени влияния на них температуры собственно двигателя и окружающей среды, условий охлаждения двигателя, о наличии выходных фильтров преобразователя.
Представленные на рис. 3.2 функциональные блоки в основном реализуются программным путем в микропроцессорной системе управления электропривода. В микроконтроллере реализуются и интерфейсные функции по связи с датчиками токов, напряжений и скорости двигателя.
2.9 Система защит
Реализует две группы защит: быстродействующие, срабатывание которых мгновенно блокирует привод, сбрасывает флаг состояния «Готовность 1» (READY1), отключает силовое питание преобразователя, и медленнодействующие, мгновенно сбрасывающие флаг состояния «Готовность 2» (READY2) при достижении порога перегрузки (перегрева) и блокирующие привод с выдержкой времени в случае, если нагрузка (температура) не снижается (см. рис 3.9).
К 1 - ой группе защит относятся:
• максимально-токовая защита преобразователя;
• защита от превышения максимально допустимой температуры кристаллов IGBT;
• защита от недопустимых отклонений питающего напряжения;
• защита от аварии узла сброса энергии;
• защиты от ошибок системы управления;
• защита от несоответствия скорости заданной и неисправности датчика;
• защита от превышения максимального уровня скорости.
Защита от замыканий во входных цепях и внутренних замыканий выпрямителя на корпус выполняется внешним автоматическим выключателем или плавкими вставками.
Максимально-токовая защита инвертора – двухуровневая. Первый уровень срабатывания защиты выполняется программно, путем сравнения мгновенных значений тока в выходных фазах с максимально допустимым для установленного в преобразователе IGBT-модуля. Срабатывание первого уровня защиты диагностируется установкой флага X в строке состояния пульта ручного управления.
Второй уровень защиты – контроль насыщения IGBT, выполняется аппаратными средствами драйвера при возникновении режима короткого замыкания выходных фаз между собой или на «землю». Диагностируется установкой флага O в строке состояния.
Защита от превышения максимально допустимой температуры кристаллов IGBT реализуется на основе динамической тепловой модели.
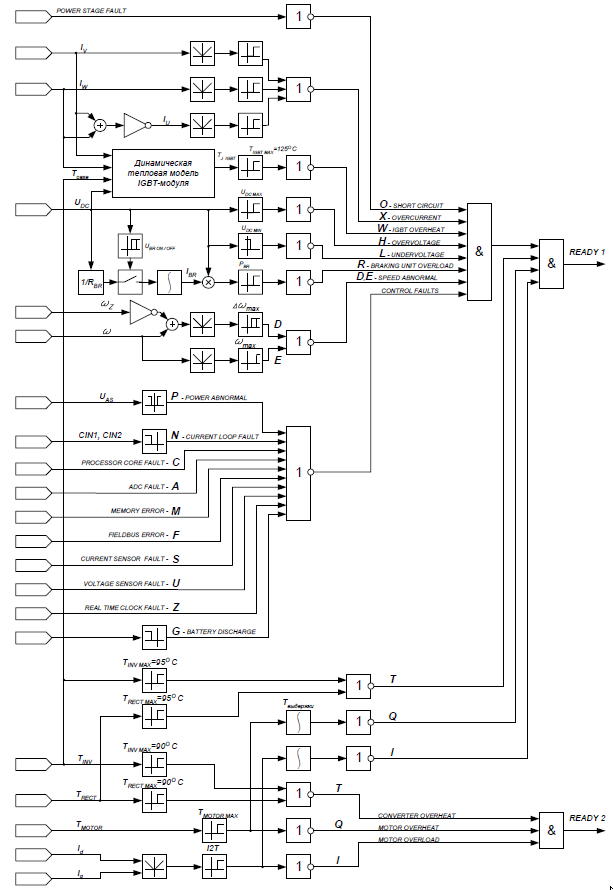
Рис. 2.9 Структура формирования флагов защит
Модель, работающая в масштабе реального времени, выполняет расчет статических и динамических потерь и мгновенных значений перегрева кристаллов каждого из шести IGBT-ключей инвертора относительно корпуса модуля. Входными переменными модели являются мгновенные значения токов выходных фаз Iv, Iw, выпрямленного напряжения Udc, и температуры корпуса IGBT-модуля и сигналы управления, формируемые векторным модулятором. Срабатывание защиты при достижении расчетного значения температуры любого из IGBT предельно допустимой величины 1250С диагностируется флагом W в строке состояния.
Защиты от недопустимого повышения и понижения напряжения выполняются по сигналу датчика в звене постоянного напряжения. Порог срабатывания защиты от повышения напряжения составляет 700 В. Порог срабатывания защиты от понижения напряжения и обрыва фазы составляет -15% от номинального значения напряжения питающей сети. Срабатывание диагностируется соответственно флагами H и L. Защита выпрямителя от импульсных сетевых перенапряжений выполняется установленными на входе варисторами.
Защита от аварии узла сброса энергии выполняется путем контроля пределов использования балластного резистора. Для корректной работы защиты должны быть установлены параметры подключенного резистора  ,
,  ,
,  ,
,  в меню «ИНИЦИАЛИЗАЦИЯ / БАЛЛАСТНЫЙ РЕЗИСТОР». Срабатывание защиты диагностируется установкой флага R в строке состояния. Время выдержки до срабатывания защиты определяется по формуле:
в меню «ИНИЦИАЛИЗАЦИЯ / БАЛЛАСТНЫЙ РЕЗИСТОР». Срабатывание защиты диагностируется установкой флага R в строке состояния. Время выдержки до срабатывания защиты определяется по формуле:
Где  - текущая кратность перегрузки по мощности резистора,
- текущая кратность перегрузки по мощности резистора,
 - текущее значение напряжения на конденсаторах фильтра,
- текущее значение напряжения на конденсаторах фильтра,
- сопротивление подключенного балластного резистора,
- мощность подключенного балластного резистора,
 - постоянная времени модели нагрева,
- постоянная времени модели нагрева,
 - нормированное время действия перегрузки (по умолчанию - 30 с),
- нормированное время действия перегрузки (по умолчанию - 30 с),
 - нормированная кратность перегрузки (по умолчанию - 1.5).
- нормированная кратность перегрузки (по умолчанию - 1.5).
Защиты от ошибок системы управления диагностируются следующими флагами:
- отклонение напряжений питания цепей управления сверх допустимых пределов - флагом P;
- сбой в процессорном ядре - флагом C;
- ошибка аналого-цифрового преобразователя - флагом A;
- ошибка энергонезависимой памяти - флагом M;
- ошибка тестирования датчиков тока - флагом S;
- ошибка тестирования датчика напряжения - флагом U;
- ошибка управления по сети (превышено время ожидания кадра) - флагом F;
- потеря сигнала токовой петли (I<4mA) - флагом N;
- неисправность (отсутствие) микросхемы часов реального времени - флагом Z;
- разряд батарейки питания микросхемы часов реального времени - флагом G.
Защита от несоответствия скорости заданной, в том числе при неисправности датчика, некорректной установке его параметров или неправильном подключении (фазировке), диагностируется установкой флага D. Работа защиты блокируется в следующих случаях:
- отключен регулятор скорости параметром РегСкорости (меню «НАБОР ПАРАМЕТРОВ / РЕГУЛЯТОР СКОРОСТИ»),
- привод работает в режиме внешнего токоограничения,
- выполняется процедура автонастройки.
При превышении уровня максимально допустимой скорости устанавливается флаг E.
Ко 2 - ой группе защит относятся:
• температурная защита преобразователя;
• температурная защита двигателя;
• время-токовая защита двигателя.
Температурная защита преобразователя выполняется по сигналам датчиков, установленных в силовых модулях инвертора и выпрямителя, и настроена на максимально допустимую рабочую температуру. При достижении температуры корпуса любого из модулей 800С сбрасывается флаг «Готовность 2» (READY2=0), в строке состояния пульта ручного управления отображается мигающий символ T. При температуре 85.С привод блокируется, сбрасывается флаг «Готовность 1» (READY1=0), отключается силовое питание преобразователя, в строке состояния отображается немигающий символ T.
Температурная защита двигателя может быть активизирована, если в двигателе имеется встроенный PTC резистор (позистор). Для этого в меню «НАБОР ПАРАМЕТРОВ / ПАРАМЕТРЫ ЗАЩИТ» устанавливается параметр Термозащита __ВКЛ. При достижении температурой двигателя порогового значения сбрасывается сигнал «Готовность 2» (READY2=0), в строке состояния пульта ручного управления отображается мигающий символ Q. Если температура продолжает расти, то через время, установленное параметром  сбрасывается сигнал «Готовность 1» (READY1=0), в строке состояния отображается немигающий символ Q. Требуемый порог срабатывания защиты может быть скорректирован с помощью подстроечного резистора RV1 на интерфейсной плате.
сбрасывается сигнал «Готовность 1» (READY1=0), в строке состояния отображается немигающий символ Q. Требуемый порог срабатывания защиты может быть скорректирован с помощью подстроечного резистора RV1 на интерфейсной плате.
Действие время-токовой защиты двигателя программируется параметрами I2T, K I2T и T I2T в меню «НАБОР ПАРАМЕТРОВ / ПАРАРАМЕТРЫ ЗАЩИТ». Порог активизации защиты I2T задается в процентах от номинального тока двигателя Is ном (меню «НАБОР ПАРАМЕТРОВ / ПАРАМЕТРЫ ДВИГАТЕЛЯ»). В заводской настройке устанавливается на уровне 100%. При достижении током установленного значения сбрасывается сигнал «Готовность 2» (READY2=0) и отображается мигающий символ I. Если нагрузка не снижается, то преобразователь блокируется с выдержкой времени, определяемой формулой:
где  - текущая кратность перегрузки по току двигателя,
- текущая кратность перегрузки по току двигателя,
 - текущее действующее значение тока фазы статора двигателя,
- текущее действующее значение тока фазы статора двигателя,
 - пороговое значение тока фазы статора двигателя, соответствующее уставке время-токовой защиты I2T,
- пороговое значение тока фазы статора двигателя, соответствующее уставке время-токовой защиты I2T,
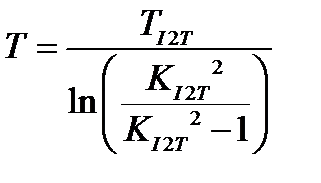 - постоянная времени модели нагрева,
- постоянная времени модели нагрева,
 - нормированное время действия перегрузки (по умолчанию - 30 с),
- нормированное время действия перегрузки (по умолчанию - 30 с),
 - нормированная кратность перегрузки (по умолчанию - 1.5).
- нормированная кратность перегрузки (по умолчанию - 1.5).
При этом в строке состояния отображается немигающий символ флага I.
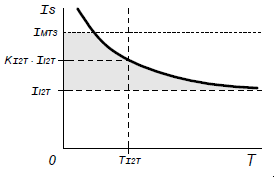
Рис. 9.2. Характеристика время-токовой защиты двигателя
Разблокирование привода и сброс флагов защит выполняется входным логическим сигналом «Сброс защит» (ER_RST) или отключением питания. Флаги срабатывания защит второй группы могут быть сброшены только при снижении температуры преобразователя (двигателя) до установленного значения или с выдержкой времени, эквивалентной остыванию двигателя после перегрузки.
Состояние флагов защит для последних 4 отключений сохраняются в энергонезависимой памяти контроллера. Они отображаются в меню «ИСТОРИЯ ОТКЛЮЧЕНИЙ» с указанием даты и времени отключения.
|
из
5.00
|
Обсуждение в статье: Выбор комплектного электропривода |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы