 |
Главная |


Рычков С. П. MSC.visual NASTRAN для Windows С.П. Рычков М: НТ-пресс 2004 г. 552 с
|
из
5.00
|
Содержание разделов дисциплины
Типовые задачи анализа, синтеза и оптимизации на этапе конструкторского проектирования РЭС. Организация математического и программного обеспечения для их решения.
Классификация задач математических моделей и методов топологического проектирования РЭС.
Математические модели конструкций РЭС, используемые в задачах топологического проектирования.
Методы и алгоритмы решения задачи компоновки.
Модели и алгоритмы размещения элементов РЭС на коммутационном поле.
Алгоритмы трассировки соединений в РЭС.
Основные задачи анализа и верификации конструкций РЭС. Математические модели процессов и полей различной физической природы в конструкциях РЭС. Оптимизация параметров и характеристик РЭС.
Методы, модели и алгоритмы решения задач учета статистического разброса параметров при проектировании РЭС.
Основные направления и тенденции развития и повышения эффективности современных САПР РЭС.
Конспект лекций по дисциплине
Лекция 1.
РАЗДЕЛ 1 /1, с. 5-30, 150-157/.. Введение. Цель и задачи дисциплины. Основные понятия и определения. Современное состояние автоматизированного проектирования РЭС. Состав и возможности современных САПР РЭС. Наиболее распространенные программные комплексы конструкторско-топологического и схемотехнического проектирования РЭС. CALS -технология. Техническая база современных САПР РЭС. Телекоммуникационные технологии и развитие автоматизированного проектирования. Экономические аспекты применения современных САПР РЭС.
Целью дисциплины является овладение теоретическими знаниями, практическими навыками и умениями решения задач проектирования РЭС с помощью методов и средств автоматизации проектных работ, использующих современные информационные технологии, методы математического моделирования и оптимизации. Основными задачами при освоении дисциплины являются изучение возможностей и особенностей применения и развития современных САПР РЭС, методов, математического обеспечения и процедур синтеза, анализа, оптимизации конструкций и технологических процессов производства РЭС, верификации и принятия проектных решений.
С точки зрения содержания решаемых задач процесс проектирования можно разбить на следующие этапы:
1. Системотехническое проектирование, при котором выбираются и формулируются цели проектирования, обосновываются исходные данные и определяются принципы построения системы. При этом формируется структура проектируемого объекта, его составных частей, которыми обычно являются функционально завершенные блоки, определяются энергетические и информационные связи между составными частями. В результате формулируются частные технические задания на проектирование отдельных составных частей объекта.
2. Функциональное проектирование, применительно к РЭС называемое также схемотехническим, имеет целью аппаратурную реализацию составных частей системы (комплексов, устройств, узлов). При этом выбирают элементную базу, принципиальные схемы и оптимизируют параметры (осуществляют структурный и параметрический синтез схем) с точки зрения обеспечения наилучшего функционирования и эффективного производства. При выборе элементной базы и синтезе схем стремятся учитывать конструкторско-технологические требования.
3. Конструирование, называемое также техническим проектированием, решает задачи компоновки и размещения элементов и узлов, осуществления печатных и проводных соединений для РЭС всех уровней (модулей, ячеек, блоков, шкафов), а также задачи теплоотвода, электрической прочности, защиты от внешних воздействий и т.п. При этом стремятся оптимизировать принимаемые решения по конструктивно-технологическим, экономическим и эксплуатационным показателям.
 На этом этапе проектирования разрабатывают техническую документацию, необходимую для изготовления и эксплуатации РЭС.
На этом этапе проектирования разрабатывают техническую документацию, необходимую для изготовления и эксплуатации РЭС.
4. Технологическая подготовка производства обеспечивает разработку технологических процессов изготовления отдельных блоков и всей системы в целом. На этом этапе проектирования создается технологическая документация на основе предшествующих результатов.
Каждый этап проектирования сводится к формированию описаний проектируемого РЭС, относящихся к различным иерархическим уровням и аспектам его создания и работы. Этапы проектирования состоят из отдельных проектных процедур, которые заканчиваются частным проектным решением. Типичными для проектирования РЭС процедурами являются анализ и синтез описаний различных уровней и аспектов.
Процедура синтеза заключается в создании проектного решения (описания) по заданным требованиям, свойствам и ограничениям. Например, широко используются при проектировании РЭС процедуры синтеза электронных схем по их заданным характеристикам в частотной или временной области. При этом в процессе синтеза могут создаваться структура схемы (структурный синтез) либо определяться параметры элементов заданной схемы, обеспечивающие требуемые характеристики (параметрический синтез).
Процедура анализа состоит в определении свойств заданного (или выбранного) описания. Примерами такой процедуры могут служить расчет частотных или переходных характеристик электронных схем, определение реакции схемы на заданное воздействие и др. Анализ позволяет оценить степень удовлетворения проектного решения заданным требованиям и его пригодность. Процедуры синтеза и анализа в процессе проектирования тесно связаны между собой, поскольку обе они направлены на создание приемлемого или оптимального проектного решения.
Типичной проектной процедурой является оптимизация, которая приводит к оптимальному (по определенному критерию) проектному решению. Например, широко используется оптимизация параметров электронных схем с целью наилучшего приближения частотных характеристик к заданным. Процедура оптимизации состоит в многократном анализе при целевом изменении параметров схемы до удовлетворительного приближения к заданным характеристикам. В сущности, оптимизация обеспечивает создание (синтез) проектного решения, но включает поэтапную оценку характеристик (анализ).
Проектные процедуры состоят из отдельных проектных операций. Например, в процессе анализа математических моделей РЭС приходится решать дифференциальные и алгебраические уравнения, осуществлять операции с матрицами и т.п. Такие операции могут иметь обособленный характер, но в целом они образуют единую проектную процедуру.
Проектные процедуры и операции выполняются в определенной последовательности, называемой маршрутом проектирования.
Маршруты проектирования могут начинаться с нижних иерархических уровней описаний (восходящее проектирование) либо с верхних (нисходящее проектирование).
САПР создаются в проектных, конструкторских, технологических организациях и на предприятиях с целью повышения качества, технико-экономической эффективности проектируемых и выпускаемых РЭС, уменьшения затрат на их создание и эксплуатацию, сокращения сроков и трудоемкости проектирования, а также повышения качества проектной документации.
Системы автоматизированного проектирования состоят из совокупности средств методического, математического, лингвистического, программного, технического, информационного и организационного обеспечений.
Методическое обеспечение (МО) САПР включает в себя теорию процессов, происходящих в схемах и конструкциях РЭС, методы анализа и синтеза схем и конструкций радиоэлектронных устройств, систем и их составных частей, их математические модели, математические методы и алгоритмы численного решения систем уравнений, описывающих схемы и конструкции РЭС. Указанные компоненты МО составляют ядро САПР. В методическое обеспечение САПР входят также алгоритмические специальные языки программирования, терминология, нормативы, стандарты и другие данные. Очевидно, что разработка методического обеспечения САПР РЭС требует глубоких специальных знаний в областях радиотехники, электроники, в частности системотехники, схемотехники и микроэлектроники, конструирования и технологии производства РЭС. Отсюда вытекает, что разработка методического обеспечения САПР РЭС — прерогатива специалистов в области радиотехники и электроники.
Обычно в качестве обособленных блоков в методическом обеспечении выделяются математическое и лингвистическое обеспечения.
Математическое обеспечение — это совокупность математических моделей, методов и алгоритмов для решения задач автоматизированного проектирования.
Лингвистическое обеспечение представляет собой совокупность языков, используемых в САПР для представления информации о проектируемых объектах, процессе и средствах проектирования и для осуществления диалога между проектировщиками и ЭВМ.
Если математическое и лингвистическое обеспечения являются полностью самостоятельными в составе САПР, под методическим обеспечением понимается совокупность документов, описывающих состав, правила отбора и эксплуатации средств автоматизированного проектирования.
Компоненты МО создаются на основе перспективных методов проектирования, поиска новых принципов действия и технических решений, эффективных математических и других моделей проектируемых объектов, применения методов многовариантного проектирования и оптимизации, использования типовых и стандартных проектных процедур, стандартных вычислительных методов.
Программное обеспечение (ПО) включает в себя документы с текстами программ, программы на машинных носителях (магнитных лентах, дисках и др.) и эксплуатационные документы, обеспечивающие функционирование САПР.
Программное обеспечение подразделяется на общесистемное и прикладное. Компонентами общесистемного ПО являются, например, операционные системы, трансляторы с алгоритмических языков, супервизоры и т.п., то есть совокупность программ, которая осуществляет управление вводом и обработкой информации в ЭВМ, диалоговый режим работы и другие обслуживающие функции независимо от объекта проектирования. Прикладное ПО включает программы и пакеты прикладных программ, предназначенные непосредственно для получения проектных решений. Прикладное ПО разрабатывается обычно совместно специалистами в области проектируемых РЭС и системного программирования.
Техническое обеспечение (ТО) САПР включает в себя устройства вычислительной и организационной техники, средства передачи данных, измерительные и другие устройства или их сочетания.
Информационное обеспечение (ИО) САПР состоит из описания стандартных проектных процедур, типовых проектных решений, типовых элементов РЭС, комплектующих изделий и их моделей, материалов, числовых значений параметров и других данных. Эти данные в закодированной форме записываются на машинных носителях: магнитных лентах и магнитных дисках. Основное назначение информационного обеспечения САПР— это уменьшение объемов информации, требуемой в процессе проектирования от разработчика РЭС, и исключение дублирования данных в прикладном ПО и ТО САПР.
Данные ПО обычно группируются в отдельные массивы, каждый из которых относится к определенному объекту описания. Такие массивы называются файлами. Вся совокупность файлов образует базу данных, которую можно многократно использовать при проектировании различных РЭС для различных этапов и уровней. Для создания, расширения, корректировки и коллективного использования данных создаются специальные системы управления базами данных (СУБД). Совокупность баз данных, систем управления ими, а также относящихся к ним программных, языковых, технических и организационных средств называется банком данных.
Организационное обеспечение САПР включает методические и руководящие материалы, положения, приказы, инструкции, штатные расписания, квалификационные требования и другие документы, обеспечивающие необходимую деятельность и взаимодействие различных подразделений организации и отдельных пользователей при создании, эксплуатации и развитии САПР.
Основными структурными звеньями САПР являются подсистемы. Подсистемой называется выделенная по некоторым признакам часть САПР, обеспечивающая получение законченных проектных решений и соответствующих проектных документов. Различают объектно-ориентированные (объектные) и объектно-независимые (инвариантные) подсистемы.
Объектные подсистемы осуществляют непосредственное проектирование. Применительно к САПР, осуществляющим комплексное проектирование РЭС, объектными являются, например, подсистемы схемотехнического и конструкторского проектирования. Для конструкторских САПР объектными являются подсистемы компоновки, размещения, трассировки и т.п.
Инвариантные подсистемы выполняют функции управления и обработки информации, не зависящие от объекта проектирования. Таковыми являются, например, подсистемы управления САПР, диалоговых процедур, оптимизации, подсистемы ввода, обработки и вывода графической информации, подсистемы информационно-поисковых процедур и др.
РАЗДЕЛ 2 /1, с. 34-64, 72-92/. Типовые задачи анализа, синтеза и оптимизации на этапе конструкторского проектирования РЭС. Организация математического обеспечения для их решения. Топологическое проектирование РЭС (компоновка, размещение, трассировка) как задача синтеза и структурной оптимизации. Задачи моделирования основных физических процессов и полей в РЭС как задачи анализа. Обеспечение характеристик РЭС как задача параметрической оптимизации.
Математическое описание проектируемого объекта называют математической моделью. Математическая модель - это совокупность математических элементов (чисел, переменных, векторов, множеств и т.п.) и отношений между ними, которые с требуемой для проектирования точностью описывают свойства проектируемого объекта. На каждом этапе проектирования используется свое математическое описание проектируемого объекта, сложность которого должна быть согласована с возможностями анализа на ЭВМ, что приводит к необходимости иметь для одного объекта несколько моделей различного уровня сложности.
В общей теории математического моделирования математическую модель любого объекта характеризуют внутренними, внешними, выходными параметрами и фазовыми переменными. Внутренние параметры модели определяются характеристиками компонентов, входящих в проектируемый объект, например номиналы элементов принципиальной схемы. Если проектируемый объект содержит n элементарных компонентов, то и его математическая модель будет определяться параметрами  , которые образуют вектор внутренних параметров
, которые образуют вектор внутренних параметров  . Каждый из параметров
. Каждый из параметров  в свою очередь, может быть функцией, вектором или еще более сложным математическим функционалом в зависимости от объекта проектирования.
в свою очередь, может быть функцией, вектором или еще более сложным математическим функционалом в зависимости от объекта проектирования.
Выходные параметры модели - это показатели, характеризующие функциональные, эксплуатационные, конструкторско-технологические, экономические и другие характеристики проектируемого объекта. К таким показателям могут относиться коэффициенты передачи, масса и габариты проектируемого объекта, надежность, стоимость и т.п. Понятия внутренних и выходных параметров инвариантны, при моделировании на более сложном уровне выходные параметры могут стать внутренними и наоборот. Например, сопротивление резистора является внутренним параметром при моделировании усилительного устройства, компонентом которого он является, но это сопротивление будет выходным параметром при моделировании самого резистора, что требуется при пленочном его исполнении. Вектор выходных параметров модели будем обозначать 
Внешние параметры модели - это характеристики внешней по отношению к проектируемому объекту среды, а также рабочие управляющие воздействия. Вектор внешних параметров в общем случае содержит множество самых различных составляющих, к его составляющим с полным правом можно отнести все, что говорилось ранее о составляющих вектора внутренних параметров. Будем обозначать его 
Уравнения математической модели могут связывать некоторые физические характеристики компонентов, которые полностью характеризуют состояние объекта, но не являются выходными или внутренними параметрами модели (например, токи и напряжения в радиоэлектронных устройствах, внутренними параметрами которых являются номиналы элементов электрических схем, а выходными параметрами - выходная мощность, коэффициент передачи и т.п.). Такие характеристики называют фазовыми переменными. Минимальный по размерности вектор фазовых переменных  , полностью характеризующий работу объекта проектирования, называют базисным вектором. Например, при составлении уравнений математической модели радиоэлектронных устройств в качестве базисного вектора
, полностью характеризующий работу объекта проектирования, называют базисным вектором. Например, при составлении уравнений математической модели радиоэлектронных устройств в качестве базисного вектора  можно использовать вектор узловых потенциалов либо вектор напряжений на конденсаторах и токов в индуктивностях - переменные состояния. Использование вектора фазовых переменных позволяет упростить алгоритмическую реализацию программ, составляющих уравнения математической модели устройства.
можно использовать вектор узловых потенциалов либо вектор напряжений на конденсаторах и токов в индуктивностях - переменные состояния. Использование вектора фазовых переменных позволяет упростить алгоритмическую реализацию программ, составляющих уравнения математической модели устройства.
РАЗДЕЛ 3 /1, с. 31-34/. Классификация задач, математических моделей и методов топологического проектирования РЭС.
Задачи компоновки, размещения и трассировки. Основные типы алгоритмов их решения. Коммутационная схема. Применение теории графов и множеств при проектировании топологии.
Задача компоновки заключается в распределении модулей низшего уровня по конструктивным модулям высшего уровня. При этом считается, что каждый модуль является конструктивно неделимым компонентом по отношению к модулю более высокого уровня и, как правило, функционально и конструктивно унифицированным. Среди задач компоновки можно выделить два характерных класса. К первому из них относятся задачи, в которых осуществляется разбиение схемы устройств на конструктивные модули с учетом таких ограничений, как количество компонентов в модуле, число внешних выводов на модуле, суммарная площадь, занимаемая компонентами и соединениями, и т.п. Главными критериями оптимальности компоновки в этом случае являются минимум числа образующихся в результате компоновки модулей высшего уровня, минимум числа межсоединений между модулями и др. К отмеченным выше критериям и ограничениям могут быть добавлены и другие, например условия электромагнитной совместимости в модуле, нормального теплообмена, минимизации задержек в распространении сигналов. Эти условия должны быть выяснены до начала компоновки либо проверяются по окончании компоновки.
Такие задачи возникают при разбиении схемы устройства на узлы большой степени сложности, к которым не предъявлены строгие требования в отношении их схемной и функциональной унификации. Примером таких задач являются задачи разбиения схемы на большие интегральные схемы частного применения, распределения микросхем по печатным платам, отдельных печатных плат по панелям и т. п. Подводя итог вышесказанному, отметим, что к первому классу задач компоновки относятся такие, в которых критерии оптимизации и ограничения могут быть сведены к определенным конструктивным параметрам расположения отдельных компонентов в модуле и их межсоединений.
Ко второму классу задач компоновки относятся задачи, в которых помимо конструктивных характеристик модулей существенны и их функциональные характеристики. Эти задачи возникают, например, на этапе перехода от функциональных схем цифровых устройств к принципиальным электрическим схемам и состоят в выборе элементов логической схемы для типовых модулей (микросхем) из заданного конструктивного набора. Каждый из типовых модулей может включать несколько логических элементов или их функциональных групп, в общем случае соединенных между собой. Иногда эти задачи выделяют в отдельный класс и называют задачами покрытия функциональной схемы заданным набором конструктивных модулей. Эти задачи более трудны в формализации, их решение до настоящего времени представляет значительные трудности.
Задачи размещения и трассировки являются тесно связанными, так как в процессе размещения определяются условия для трассировки межсоединений. Совместное решение этих задач представляет значительные трудности, и при алгоритмическом подходе к их решению эти задачи рассматриваются, как правило, раздельно. Сначала осуществляется размещение модулей низшего уровня в модуле высшего, например микросхем на печатной плате, а затем осуществляется трассировка межсоединений. Если трассировка оказывается неудовлетворительной, то процесс размещения повторяется с учетом недостатков предыдущего варианта размещения.
Лекция 2.
РАЗДЕЛ 4 /1, с. 41-49/. Математические модели конструкций РЭС, используемые в задачах топологического проектированиям. Представление коммутационных схем в виде графа, мультиграфа и гиперграфа. Матричное представление графов. Графовые и матричные модели монтажно-коммутационного пространства.
В большинстве случаев для решения задач конструкторского проектирования радиоустройство представляется множеством конструктивных модулей, функциональное назначение которых не конкретизируется и группы контактов которых связаны эквипотенциальными электрическими соединениями. Такое представление устройства называют коммутационной схемой.
В общем виде задачу размещения модулей низшего уровня в модуле высшего можно описать следующим образом: задана коммутационная схема устройства, требуется разместить модули в некотором коммутационном пространстве таким образом, чтобы обеспечить оптимальное значение некоторого функционала.
Коммутационным пространством конструктивного модуля какого-либо уровня называют область, ограниченную габаритами этого модуля, в которой располагаются модули предыдущего уровня и осуществляются электрические соединения контактов модулей низшего уровня. Различают регулярные и нерегулярные коммутационные пространства. Регулярные пространства характеризуются конечным числом позиций для размещения модулей низшего уровня и числом слоев, в которых располагаются трассы соединительных проводников. В нерегулярных пространствах нельзя заранее указать координаты позиций и число слоев проводников, так как размещаемые модули имеют различные размеры и форму.
Вариантами регулярного коммутационного пространства могут быть панель с межсоединениями, печатная плата. Типичными нерегулярными пространствами являются подложка; микросборки, кристалл интегральной схемы. Критерием оптимальности размещения в большинстве случаев является критерий минимума суммарной длины соединений, который интегральным образом учитывает многочисленные требования к расположению модулей и трасс их межсоединений, так как уменьшение длин соединений улучшает электрические характеристики устройства, упрощает трассировку межсоединений и трудоемкость изготовления платы, кроме того, данный критерий прост с точки зрения формализации.
Для измерения длин межсоединений с коммутационным пространством связывают некоторую систему координат (для плоского коммутационного пространства XOY). Расстояние между соединяемыми контактами модулей с координатами xi, xj и yi, yj соответственно можно определить одним из следующих способов:

Первый способ соответствует прокладке проводных соединений по кратчайшему расстоянию между соединяемыми контактами модулей — эвклидова метрика (рис. 3.2, а).Второй способ предполагает проведение трасс межсоединений по направлениям, параллельным координатным осям (сторонам платы),— ортогональная метрика (рис. 1, б). Третий способ применяется, когда одновременно необходимо минимизировать суммарную длину межсоединений и их максимальную длину. Действительно, при использовании этой формулы длинные соединения будут давать максимальный вклад в суммарную длину и критерий минимума суммарной длины межсоединений косвенным образом будет минимизировать и максимальные из них.
 |
Результатом решения задач размещения является определение точного расположения на коммутационном пространстве центров модулей и координат их контактов, что совместно с принципиальной электрической схемой является основой для решения задачи трассировки.
а) б)
Рис. 1. Виды монтажных соединений.
Задачи трассировки можно разделить на две группы: трассировка проводного монтажа и трассировка печатных соединений. Трассировка проводных соединений относительно более проста, так как отдельные соединения электрически изолированы друг от друга. Поэтому в большинстве случаев она может быть сведена к задаче минимизации длины отдельных электрических цепей, если не возникает задача совместной оптимизации соединений монтажных схем, например, для обеспечения электромагнитной совместимости.
Задача трассировки печатного монтажа представляется гораздо более сложной и решается в несколько этапов, которые включают определение требуемого числа слоев печати (расслоение монтажа), определение порядка трассировки каждого слоя печати, при котором обеспечивается отсутствие пересечений и минимальная длина проводников, и собственно трассировку соединений. Точная математическая формулировка этих задач зависит от применяемой технологии изготовления печатного модуля, используемых методов трассировки проводников.
Постановка и решение перечисленных конструкторских задач на ЭВМ невозможны без определения математических моделей коммутационного пространства и принципиальной электрической схемы проектируемого устройства. Модели схем и коммутационного пространства, используемые для решения задач автоматизации конструкторского проектирования, можно условно разделить на несколько видов: модели, использующие аппарат теории симметрических графов; модели, использующие аппарат теории гиперграфов и ультраграфов; модели, использующие аппарат теории множеств; эвристические модели.
Монтажно-коммутационное пространство (МКП) предназначено для размещения конструктивных модулей и трассировки соединений между их контактами, которые должны быть соединены электрическими цепями. Форма и, естественно, математическая модель МКП зависят от уровня модуля, для которого в данный момент решаются задачи конструирования (базовый матричный кристалл, печатная плата, панель и т.д.). В дальнейшем ограничимся только плоским монтажно-коммутационным пространством, соответствующим конструктивному модулю типа печатной платы. Без потери общности будем считать, что пространство имеет прямоугольную форму, так как введением областей, в которых запрещается размещение конструктивных модулей более низкого уровня или трассировки соединений, можно придать пространству произвольную форму. Так как МКП служит для решения двух задач — размещения модулей и трассировки, то модели МКП, используемые для решения каждой задачи, будут иметь отличия.
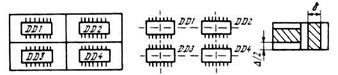
Наибольшее распространение для решения задач размещения конструктивных модулей в плоском МКП получили эвристические дискретные модели. Такие модели (будем их называть МКП1) строятся следующим образом (рис. 2, а): МКП разбивается на элементарные площадки (дискреты), каждая из которых предназначена для размещения одного конструктивного модуля более низкого уровня, например микросхемы на печатной плате. Эти площадки в дальнейшем будем называть дискретами рабочего поля (ДРП). Каждый дискрет в процессе решения задачи размещения может находиться в одном из следующих состояний: свободен для размещения, занят, имеет определенный вес, запрещающий размещение в нем модуля, и т.д. Такая модель МКП отличается простотой и удобством для использования в эвристических алгоритмах размещения, однако она не является полностью формализованной [8,9].
 |
а) б) в)
Рис. 2. Дискретные модели МКП.
Одной из разновидностей модели МКП 1 является модель с ортогональной сеткой, в узлах которой могут размещаться модули низкого уровня (рис. 3.4, б). Шаг сетки выбирается из условия возможности размещения модулей в соседних узлах сетки.
При размещении разногабаритных компонентов часто размер ДРП выбирают равным наибольшему общему делителю линейных размеров размещаемых модулей либо линейным размерам установочного места для наименьшего из модулей, если размеры всех модулей кратны. Заметим, что выбор шага дискретизации представляется весьма важным, так как при малых размерах ДРП увеличивается время решения задачи, зато повышается плотность заполнения МКП модулями низшего уровня.
Аналогичные дискретные модели используются и для решения задач трассировки. В этом случае дискрет является квадратом со сторонами, равными ширине проводника плюс зазор между ними (рис. 24, в). При этом считается, что проводник из каждого дискрета может быть проведен только в соседний ДРП.
Наибольшее распространение для решения задач размещения получили модели МКП в виде взвешенного графа VG(S, V), которые будем обозначать МКП2. Взвешенный граф VG представляет собой симметрический граф, в котором множество вершин S соответствует множеству установочных позиций в коммутационном пространстве для модулей низшего уровня, а множество ветвей интерпретирует множество связей между соответствующими установочными позициями. Каждой ветви графа υij присваивается вес pij, который равен числу условных единиц расстояния между центрами установочных позиций si и sj, интерпретируемых вершинами, инцидентными данной ветви. Вес ветви pij определяется в зависимости от метрики пространства по одной из формул.
Для описания взвешенного графа VG удобно использовать матрицу смежностей Q, строки и столбцы которой соответствуют вершинам графа, т.е. множеству установочных позиций в МКП, а элементы qij равны весу ветви, инцидентной i-й и j-й вершинам графа. Элементы, лежащие на главной диагонали матрицы смежностей Q, принимаются равными нулю. Так, для МКП, показанного на рис. 3.5, а, модель в виде взвешенного графа при ортогональной метрике пространства приведена на рис. 3, б, а матрица смежностей Q имеет вид
| s1 | s2 | s3 | s4 | ||
| s1 | |||||
| Q= | s2 | ||||
| s3 | |||||
| s4 |
 |
а) б)
Рис. 3. Графовые модели МКП для решения задачи размещения
Для решения задач размещения применяются и другие графовые модели.
Большими возможностями для формализации процесса трассировки обладают комбинированные дискретно-графовые модели МКП3. В этом случае МКП моделируется симметрическим графом G(S, V), в котором каждому ДРП ставится в соответствие вершина графа. Вершины si и sj соединяются ветвью, если они соответствуют соседним дискретам, через которые может проходить проводник. Трассы проводников могут проходить только по ветвям графа, а длина трасс определяется в соответствии с выбранной метрикой пространства. На рис. 4, а показаны модели МКП2 для трассировки
 |
по ортогональным направлениям и при допущении трассировки под углом в 45° (трассировка по шести направлениям).
а) б)
Рис. 4. Графовые модели МКП для решения задачи трассировки.
Симметрический граф G(S, V) с множеством вершин S и множеством ветвей V может быть описан в ЭВМ матрицей инциденций А, элемент которой aij = 1, если вершина si инцидентна ветви υij,и aij = 0 в противном случае. Для графа, показанного на рис. 3.6, а, при допущении трассировки по восьми направлениям матрица инциденций имеет вид
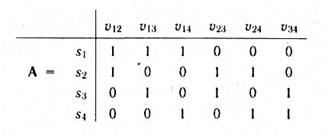 |
Модель МКП3 очень широко распространена и позволяет при трассировке получить все множество кратчайших путей в отличие от МКП1, в которой обычно получают лишь один из возможных путей из этого множества. Кроме того, вводя вес для вершин и ветвей графа, можно регулировать скорость распространения числовой волны по определенным направлениям в волновых алгоритмах трассировки за счет введения соответствующих задержек.
Аналогична МКП3 и графовая модель пространства МКП4, также используемая для решения задач трассировки. Модель МКП4 представляет симметрический граф G(S,V),вершины которого si соответствуют узлам координатной сетки, нанесенной на плоское МКП, а ветви графа υij— элементарным отрезкам координатной сетки, соединяющим две соседние точки (рис. 3.6, б). Особенностью модели МКП4 по сравнению с МКП3 является интерпретация ветви графа G(S, V)как элементарного отрезка проводника, который может быть проложен в этом месте МКП. По своим возможностям модель МКП4 эквивалентна МКП3.
Для моделирования коммутационного пространства при решении задач трассировки можно использовать модели в виде мультиграфа, т. е. симметрического графа, у которого существует хотя бы одна пара вершин, соединенных несколькими ветвями. Ветви, соединяющие одну и ту же пару вершин, называют кратными, а их максимальное число— мультичислом графа.
Одна из таких моделей МКП5 представляет мультиграф MG(S, V),в котором множество вершин графа S соответствует множеству установочных позиций в коммутационном пространстве для модулей низшего уровня, а множество ветвей V — множеству взаимно независимых непосредственных переходов между установочными позициями, т.е. множеству областей, допускающих трассировку соединений между этими позициями без пересечений.
Мультиграф MG(S, V)может быть описан с помощью матрицы смежности Q, в которой, как и для взвешенного графа, элементы qij, лежащие на главной диагонали, принимаются равными нулю, а внедиагональные элементы аи равны числу кратных ветвей, инцидентных i-й и j-й вершинам графа. Для примера на рис. 5, апоказаны фрагмент коммутационного пространства с установочными позициями и его модель в виде мультиграфа при допущении трассировки без пересечений трех проводников между соседними позициями.
 |
а) б)
Рис. 5. Модели КПМ в виде мультиграфа
 |
Матрица смежностей такого мультиграфа имеет вид
Еще более общей моделью МКП в виде мультиграфа, используемой для решения задач трассировки, является модель МКП6, в которой вершины графа соответствуют макродискретам, на которые разбивается МКП. Ребра мультиграфа соединяют соседние вершины, пр
|
из
5.00
|
Обсуждение в статье: Рычков С. П. MSC.visual NASTRAN для Windows С.П. Рычков М: НТ-пресс 2004 г. 552 с |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы