 |
Главная |


Состав и структура навигационных сообщений спутников системы GPS
|
из
5.00
|
Структурное деление навигационной информации спутников системы GPS осуществ-ляется на суперкадры, кадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12,5 мин). Один кадр передаётся в течение 30 с и имеет размер 1500 бит. Кадр раздел╦н на 5 подкадров по 300 бит и передаётся в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу/окончанию очередного 6-с интервала системного времени GPS. Подкадр состоит из 10 30-бит слов. В каждом слове 6 младших разрядов являются проверочными битами.
В 1-, 2- и 3-м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид КА, с которым установлена связь. Содержание и структура этих подкадров остаются неизменными на всех страницах суперкадра. В 4- и 5-м подкадрах содержится информация о конфигурации и состоянии всех КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее.
Алгоритмы приема и измерения параметров спутниковых
радионавигационных сигналов
К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части:
- радиочастотную часть;
- цифровой~коррелятор;
- процессор.
С выхода антенно-фидерного устройства (антенны) сигнал поступает на радиочастотную часть (рис. 7). Основная задача этой части заключается в усилении входного сигнала, филь-трации, преобразовании частоты и аналого-цифровом преобразовании. Помимо этого, с радиочастотной части приёмника поступает тактовая частота для цифровой части приёмни-ка. С выхода радиочастотной части цифровые отсчёты входного сигнала поступают на вход цифрового коррелятора.
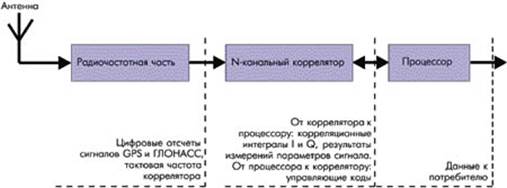
Рисунок 7. Обобщённая структура приёмника
В корреляторе спектр сигнала переносится на "нулевую" частоту. Это производится путём перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. Далее результат перемножения проходит корреляцион-ную обработку путём перемножения с опорным дальномерным кодом и накоплением на периоде дальномерного кода. В итоге получаем корреляционные интегралы I и Q. Отсчёты корреляционных интегралов поступают в процессор для дальнейшей обработки и замыкания петель ФАП (фазовая автоподстройка) и ССЗ (схема слежения за задержкой). Измерения параметров сигнала в приёмнике производятся не непосредственно по входному сигналу,
а по его точной копии, формируемой системами ФАП и ССЗ. Корреляционные интегралы I
и Q позволяют оценить степень "похожести" (коррелированности) опорного и входного сигналов. Задача коррелятора, помимо формирования интегралов I и Q, - формировать опорный сигнал, согласно с управляющими воздействиями (кодами управления), поступаю-щими с процессора. Кроме того, в некоторых приёмниках коррелятор формирует необходи-мые измерения опорных сигналов и передаёт их в процессор для дальнейшей обработки.
В то же время, так как опорные сигналы в корреляторе формируются по управляющим кодам, поступающим с процессора, то необходимые измерения опорных сигналов можно производить непосредственно в процессоре, обрабатывая соответствующим образом управляющие коды, что и делается во многих современных приёмниках.
Какие параметры сигнала измеряет коррелятор (процессор)?
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения до измерительного пункта. В навигационных системах GPS/ГЛОНАСС излучение сигналов синхронизировано со шкалой времени системы, точнее, со шкалой времени спутника, излучающего данный сигнал. В то же время, потребитель имеет информацию о расхождении шкалы времени спутника и системы. Цифровая информация, передаваемая со спутника, позволяет установить момент излучения некоторого фрагмента сигнала (метки времени) спутником в системном времени. Момент приёма этого фрагмента определяется по шкале времени приёмника. Шкала времени приём-ника (потребителя) формируется с помощью кварцевых стандартов частоты, поэтому наблю-дается постоянный "уход" шкалы времени приёмника относительно шкалы времени системы. Разность между моментом приёма фрагмента сигнала, отсчитанным по шкале времени приёмника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженная на скорость света, называется псевдодальностью [4]. Почему псевдодаль-ностью? Потому что она отличается от истинной дальности на величину, равную произведению скорости света на "уход" шкалы времени приёмника относительно шкалы времени системы. При решении навигационной задачи этот параметр определяется наравне
с координатами потребителя (приёмника).
Корреляционные интегралы, формируемые в корреляторе, позволяют отследить модуляцию сигнала спутника символами информации и вычислить метку времени во входном сигнале. Метки времени следуют с периодичностью 6 с для GPS и 2 с для ГЛОНАСС и образуют своеобразную 6(2)-секундную шкалу. В пределах одного деления этой шкалы периоды дальномерного кода образуют 1-мс шкалу. Одна миллисекунда разделена, в свою очередь, на отдельные элементы (chips, в терминологии GPS): для GPS - 1023, для ГЛОНАСС - 511. Таким образом, элементы дальномерного кода позволяют определить дальность до спутника с погрешностью ~ 300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0,01 периода, что составляет точность определения псевдодальности 3 м.
На основании измерений параметров опорного гармонического колебания, формируе-мого системой ФАП, определяют частоту и фазу несущего колебания спутника. Его уход относительно номинального значения даст доплеровское смещение частоты, по которому оценивается скорость потребителя относительно спутника. Кроме того, фазовые измерения несущей позволяют уточнить дальность до спутника с погрешностью в несколько мм.
|
из
5.00
|
Обсуждение в статье: Состав и структура навигационных сообщений спутников системы GPS |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы