 |
Главная |


Методы идентификации технических объектов
|
из
5.00
|
В основе всех весьма многочисленных методов идентификации лежит идея эксперимента с «черным ящиком», которая была введена в оборот Нобертом Винером и обстоятельно развита Россом Эшби.
Идентификация является инструментом моделирования тех объектов, которые из-за сложности или недостаточной изученности, а также из-за обилия случайных факторов не могут быть исследованы на основе существующих теоретических представлений. С помощью определенных вычислительных средств и программного обеспечения (алгоритма идентификации) строится модель объекта.
На принципиальной схеме идентификации (рис. 4.3) приведены результаты наблюдений за входами x1, x2, …, xn и выходами y1, y2, …, ym объекта, и по ней с помощью алгоритма идентификации строится модель объекта.
В предельном (теоретическом) случае «черный ящик» представляет собой некоторую систему, о структуре и внутренних свойствах которой неизвестно решительно ничего. Зато входы, т. е. внешние воздействия (факторы), и выходы, представляющие собой реакции на внешние воздействия, доступны для наблюдения (измерений) в течение неограниченного времени. Задача идентификации заключается в том, чтобы по наблюдениям за входами и выходами выявить внутренние свойства объекта или, иными словами, построить его модель.
Решение задачи допускает применение двух различных стратегий.

Рис. 4.3. Принципиальная схема идентификации объекта
В первом случае осуществляется так называемый активный эксперимент, когда на вход объекта подаются специально сформированные тестовые воздействия, характер и последовательность которых определяется заранее разработанным планом. Подобный подход обладает тем преимуществом, что за счет оптимально спланированного эксперимента позволяет получить необходимую информацию о свойствах и характеристиках объекта при минимальном объеме экспериментальных данных и соответственно при минимальной трудоемкости опытных работ. Однако цена, которую приходится платить за это преимущество, достаточно высока – объект выводится из его обычного состояния, что на практике далеко не всегда возможно по принципиальным и экономическим соображениям.
Альтернативный подход заключается в том, что проводится пассивный эксперимент. Объект исследования не подвергается искусственным возмущениям и функционирует в своем естественном режиме, но при этом организуются систематические измерения и регистрации значений его входных и выходных переменных. Обработка полученных подобным путем данных в принципе позволяет получить ту же самую информацию о свойствах объекта, что и при активном эксперименте, однако необходимый объем данных существенно (на два-три порядка) больше, чем в первом случае. Естественно, что и алгоритмы обработки данных оказываются более сложными и громоздкими.
Отметим, что на практике при построении идентифицируемых моделей часто целесообразна смешанная стратегия эксперимента. По тем входным переменным объекта, которые это допускают (по условиям безопасности, техническим, экономическим соображениям и пр.), проводится активный эксперимент. Его результаты дополняются данными пассивного эксперимента, охватывающего все прочие значимые переменные. Опыт показывает, что такой подход заметно снижает трудоемкость исследований по сравнению с методикой пассивного эксперимента в чистом виде.
Ситуация «черного ящика» представляет собой теоретический граничный случай, когда о структуре объекта неизвестно абсолютно ничего. На деле исследователь всегда располагает той или иной априорной информацией об объекте идентификации, часть которой вполне достоверна (например, действие закона сохранения и других универсальных закономерностей), часть (например, сведения о структуре объекта) может носить гипотетический характер. Объем информации зависит от характера конкретной задачи и свойств объекта моделирования. Он может варьироваться в очень широких пределах, но сам факт наличия исходной информации обязателен – иначе будет невозможна осознанная постановка задачи исследования. Поэтому на практике приходится иметь дело не с «черным ящиком», а с «серым», отчасти «прозрачным» ящиком, причем можно указать три более или менее типовых уровня «прозрачности» и, следовательно, три основных класса постановки задачи идентификации объекта.
В первом, наиболее общем случае, типичном для весьма сложных и слабо изученных объектов системного характера (экологические системы, экономические процессы больших масштабов и пр.), достоверные исходные данные о внутренних свойствах и структурных особенностях объекта исчезающе малы, почти отсутствуют. Поэтому задача идентификации, казалось бы, должна включать в себя, с одной стороны, определение зависимостей, связывающих входы и выходы, с другой стороны – определение внутренней структуры объекта. Однако в такой постановке эта задача неразрешима даже теоретически.
Дело в том, что непосредственным результатом идентификации объекта является только определение зависимостей входы–выходы, причем в непараметрической форме: в виде таблиц или отображающих содержание этих таблиц кривых. Для того чтобы говорить о структуре модели, необходимо перейти к параметрической форме их представления. Однако, как известно, однозначной связи между функциональной зависимостью и порождающей эту зависимость математической структурой не существует. Каждую непараметрическую зависимость вход–выход можно аппроксимировать различными способами и соответственно построить ряд практически равноценных моделей объекта, характеризующихся собственной структурой, собственным набором параметров и их значений.
Основанием для предпочтения той или иной параметрической модели и, следовательно, фиксации модельной структуры идентифицируемого объекта могут быть только данные, внешние по отношению к процессу идентификации, полученные, например, из теоретических соображений. Если таких данных нет, то в рассматриваемой ситуации мы получаем чисто функциональную модель, которая воспроизводит с тем или иным приближением характеристики объекта, но не содержит никакой информации о его реальной структуре.
Следует отметить, что это обстоятельство, существенно ограничивающее возможности идентифицируемых моделей применительно к задачам исследования сложного объекта, далеко не всегда следует рассматривать как недостаток. Например, в задачах автоматического управления, для которых существенны именно функциональные характеристики объекта, возможность отвлечься от его реальной структуры позволяет воспроизводить необходимые характеристики объекта управления с помощью простейших одношаговых итеративных алгоритмов, которые заведомо не соответствуют протекающим в объекте реальным явлениям, но позволяют наиболее рациональным образом организовать вычислительный процесс на ЭВМ. Любопытно, что идентифицируемые модели этого класса нередко используют и в тех случаях, когда объект в принципе поддается аналитическому описанию, но последнее получается чрезмерно сложным, громоздким и неудобным для анализа. Опыт показывает, что сознательное абстрагирование от реальной структуры подобных объектов и переход к идентификации их функциональных характеристик позволяют получить вполне обозримые компактные модели, которые с достаточной точностью описывают свойства сложного объекта-оригинала.
Второй класс задач идентификации характеризуется тем, что априорные данные о структуре моделируемого объекта, полученные теоретическим путем или определенные из конструктивных соображений, в принципе имеются. Однако какой вклад в характеристики объекта или его модели вносит тот или иной структурный компонент, наперед неизвестно, и это надлежит определить на основе эксперимента наряду со значениями соответствующих параметров. Задачи этого класса, связанные с уточнениями структуры и оцениванием параметров, часто встречаются на практике и характерны для объектов и процессов средней сложности, в частности технологических, когда определенные теоретические сведения о процессе имеются, но они неполны и носят в какой-то мере гипотетический характер, так что полное аналитическое описание объекта только на основании этих данных невозможно.
Третий класс задач связан с относительно простыми и хорошо изученными объектами, структура которых известна точно, и речь идет только о том, чтобы по экспериментальным данным оценить значения всех или некоторых входящих в исследуемую структуру параметров (параметрическая идентификация). Примером такой идентификации является определение параметров четырехполюсника A, B, C, D в уравнениях
которые представляют собой модели таких объектов ЭЭС, как ЛЭП, трансформатор и пр.
Задача экспериментального оценивания или уточнения значений параметров модели возникает при исследовании подавляющего большинства реальных объектов, даже несложных и хорошо изученных.
Общую структурную схему идентификации можно представить, как показано на рис. 4.4.
Независимо от характера решаемой на основе идентификации объекта-оригинала задачи построение модели этого класса базируется на результатах измерений соответствующих величин переменных, с чем связано два существенных обстоятельства.
Во-первых, эксперимент должен быть обеспечен необходимыми средствами измерения надлежащей точности (датчиками, преобразователями, приборами). Опыт показывает, что при идентификации даже несложных, но типовых объектов, создание измерительного комплекса, прежде всего в части первичных преобразователей (датчиков) и их привязки к объекту, часто перерастает в серьезную техническую проблему. Необходимые разработки специализированных средств измерения и их компонентов, следовательно, и проведение соответствующих опытно-конструкторских работ являются в подобных случаях скорее правилом, чем исключением, а это, естественно, усложняет работы и увеличивает их стоимость.
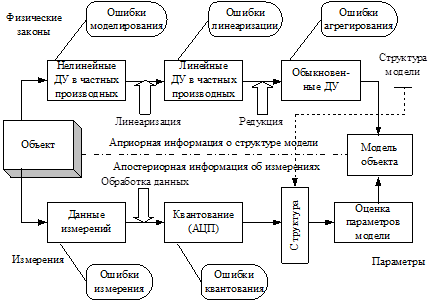
Рис. 4.4. Структурная схема идентификации объекта
Во-вторых, используемый в процессе эксперимента измерительный комплекс со всеми его компонентами требует материального обеспечения, т. е. градуировки, аттестации и периодической проверки в соответствии с нормативно узаконенным требованием. Реальная ситуация с метрическим обеспечением экспериментальной аппаратуры зависит от характера величин, подлежащих измерению в каждом конкретном случае.
Таким образом, даже при условии вполне современного технического и технологического оборудования путь от принципиальной возможности построения модели на основе идентификации до практической реализации этой возможности в большинстве случаев оказывается длинным, сложным и трудоемким. Кроме того, проведение одного эксперимента само по себе не может требовать значительных затрат, и в этом случае возникает необходимость сокращать число возможных опытов в эксперименте без ущерба для точности математической модели. Во многих случаях этому помогает оптимальное планирование эксперимента.
4.4. Выбор структуры математической модели
и вычисление ее параметров
Непосредственными результатами наблюдений (опытов) в процессе проведения эксперимента являются зависимости между входами x и выходами y, представленные, как правило, в табличной форме. Построение математической модели в параметрической форме требует обработки табличных данных. При этом следует учесть, что экспериментальные данные могут содержать систематические, случайные и грубые погрешности. Обычно погрешности измерений принято представлять в виде среднеквадратической погрешности σ и двумя границами интервала, в пределах которого истинное значение измеряемого параметра находится с заданной вероятностью (Δi, Δh).
На первом этапе построения математической модели необходимо выбрать вид (структуру) математической модели. Второй этап требует специальных вычислительных средств для определения параметров выбранной математической модели. Рассмотрим общий подход к подбору вида математической модели без использования каких-либо теоретических представлений о внутренней структуре моделируемого объекта. В математике такая задача носит название задачи о приближении функций. Для простоты примем объект с одним входом x и одним выходом y.
Пусть на некотором множестве задана система функций φ0(x), φ1(x), …, φm(x), которые в дальнейшем будем считать достаточно гладкими (например, непрерывно дифференцируемыми) функциями. Назовем эту систему основной.
Функции вида

где c0, c1, …, cm – постоянные коэффициенты, называются обобщенными многочленами порядка m. В частности, если основная сис-
тема состоит из целых неотрицательных степеней переменной x, т. е. φ0(x) = 1, φ1(x) = x, …, φm(x) = xm, то

есть обычный полином степени m.
Если
то

называется тригонометрическим полиномом (или тригонометрическим многочленом) порядка m.
Задача о приближении функций ставится следующим образом: данную функцию f(x) требуется заменить обобщенным многочленом Qm(x) заданного порядка m так, чтобы отклонение (в смысле σ или
(Δi, Δh)) функции f(x) от обобщенного многочлена Qm(x) на указанном множестве {x} было наименьшим. При этом многочлен Qm(x) в общем случае называется аппроксимирующим.
Если множество {x} состоит из отдельных точек x0, x1, …, xn,
то приближение называется дискретным. Если же {x} есть отрезок
a ≤ x ≤ b, то приближение называется интегральным.
На практике часто пользуются приближениями функций обычным и тригонометрическим полиномами.
В теории дискретного приближения функций имеет место задача интерполяции функций. В случае обычного полинома задача интерполяции формулируется следующим образом. Для данной функции f(x) найти полином Qm(x) возможно низшей степени m, принимающей в заданных точках xi (i = 0, 1, 2, …, n; xi ≠ xj при i ≠ j) те же значения, что и f(x), т. е. такой, что Qm(xi) = f(xi) (i = 0, 1, 2, …, n). Такой полином называют интерполяционным, а точки xi (i = 0, 1, 2, …, n) – узлами интерполяции.
Как известно, существует единственный полином степени не выше n, принимающий в точках xi (i = 0, 1, 2, …, n) заданные значения. Поэтому можно положить n = m. Коэффициенты a0, a1, …, an полинома Qn(x) можно определить из системы уравнений:

где 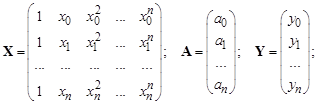
yi = f(xi) (i = 0, 1, 2, …, n).
Определитель этой системы линейных алгебраических уравнений есть так называемый определитель Вандермонда Δ ≠ 0, и, следовательно, система (4.11) имеет единственное решение.
Интерполяция дает возможность вычислить значения функции y =
= f(x) между заданными точками xi – 1 и xi (i = 1, 2, …, n).
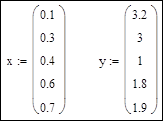
Пример 3. Выполним интерполяцию функции, заданную в табличной форме в пяти точках (см. ниже). Расчеты выполним в системе Mathcad.
Векторы данных:
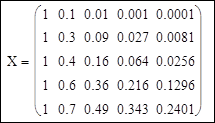
Заполнение матрицы X:

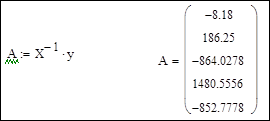
Получение коэффициентов интерполяционного полинома:
Определение функции полинома:

График функции для интерполирующего полинома:

Определим значение функции в промежуточных точках со значениями 0,2 и 0,5.
Для сравнения выполним интерполяцию по тем же данным другими способами, заложенными в Mathcad; кусочно-линейной и сплайн-интерполяцией.
Графики интерполяционных функций:


Значения в заданных точках:
· для полиномиальной

· для линейной

· для сплайн-интерполяции

Результаты вычислений в промежуточных точках достаточно сильно различаются между собой, и принятие той или иной модели может основываться на данных, внешних относительно использованных измерений.
Интерполяция является частным случаем аппроксимации, когда степень интерполяционного полинома равна числу измерений без единицы и n = m (число измерений равно n + 1, а число неизвестных коэффициентов модели равно m + 1). Когда n > m, в общем случае имеем задачу аппроксимации.
Для данной функции f(x) найти полином Qm(x) степени m, который в заданных точках xi (i = 0, 1, 2, …, n; xi ≠ xj при i ≠ j) доставляет минимум некоторой функции коэффициентов ai (i = 0, 1, 2, …, m): Sm(a0,
a1, …, am). Такой полином называют аппроксимирующим. В общем случае Qm(x) есть обобщенный многочлен вида (4.7).
Функцию Sm(a0, a1, …, am) можно выбрать в соответствии с методом наименьших квадратов как сумму квадратов отклонений полинома Qm(x) от функции f(xi) на заданном множестве точек
Такой способ носит название квадратичной аппроксимации.
коэффициенты аппроксимирующего полинома Qm(x) вычисляют посредством решения системы линейных уравнений:

где 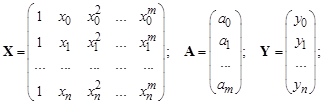
yi = f(xi) (i = 0, 1, 2, …, n) и верхний индекс T означает операцию транспонирования матрицы.
Система уравнений (4.13) получена дифференцированием критерия квадратичной аппроксимации (4.12) по искомым коэффициентам и приравниванию нулю полученных выражений. В случае обобщенного полинома (4.7) с произвольными функциями φ0(x), φ1(x), …, φm(x) в системе уравнений (4.13) вместо значений степеней x требуется подстановка значений соответствующих функций φ0(x), φ1(x), …, φm(x), вычисленных в заданных точках x.
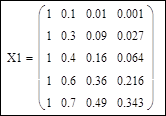
Пример 4. Выполним аппроксимацию функции из примера 3 полиномами степени 3 и 2.
Для Q3(x)
Заполнение матрицы X:

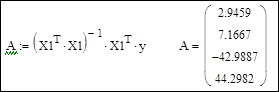
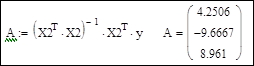
Получение коэффициентов аппроксимирующего полинома Q3(x):
Определение функции полинома:

График функции для аппроксимирующего полинома Q3(x):

Среднеквадратическая погрешность аппроксимации:

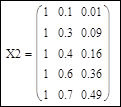
Для Q2(x)
Заполнение матрицы X:

Получение коэффициентов аппроксимирующего полинома Q2(x):
Определение функции полинома:

График функции для аппроксимирующего полинома Q2(x):
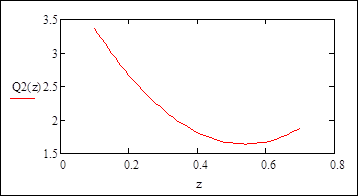
Среднеквадратическая погрешность аппроксимации:

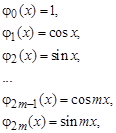
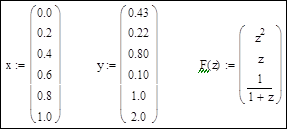
Пример 5. Выполним аппроксимацию данных, приведенных в табличной форме (см. ниже) в виде обобщенного многочлена Q2(x) = c0φ0(x) + c1φ1(x) +
+ c2φ2(x), где функции φi(x) (i = 0, 1, 2) выбраны в виде

Данные эксперимента и вектор функция составляющих Q2(x):
Вектор коэффициентов модели вычислим с помощью специальной функции Mathcad linfit(x, y, F)
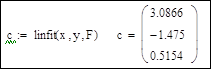
Функция обобщенного многочлена и ее график:

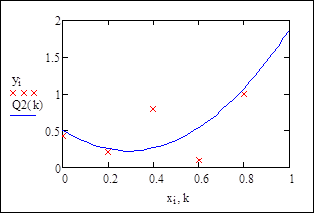
Среднеквадратическая ошибка:
Существуют модели, которые не являются многочленами вида (4.7) и нелинейно зависят от параметров, как, например, функция
 .
.
Здесь y нелинейно зависит от параметров a и b. К некоторым функциям такого вида применимо приведение нелинейной задачи к линейной по следующему способу.
Пусть задана система точек Mi(xi, yi). Вводятся новые переменные X и Y так, чтобы преобразованные точки Ni(Xi, Yi) лежали на одной прямой. Например, степенная зависимость y = cxa посредством логарифмирования приводится к линейной:

и линейная модель в новых координатах:

Здесь Ni(Xi, Yi) = Ni(lg xi, lg yi). Некоторые функции, которые приводятся к линейной относительно коэффициентов задаче аппроксимации, представлены в табл. 4.1.
Таблица 4.1
Некоторые функции, допускающие преобразование к линейной
относительно коэффициентов задаче аппроксимации
| № п/п | Исходная функция | Линейная функция | Соотношения для преобразования |
| y = axb | Y = α + bX | Y = lg y; X = lg x; α = lg a | |
| y = abx | Y = α + βx | Y = ln y; α = ln a; β = ln b | |

| 
| 
| |

|
| 
| |

|
| 
| |

| 
| 
|
В тех случаях, когда невозможно перейти к линейной относительно коэффициентов задаче аппроксимации, выводятся подобные (4.13) нелинейные уравнения аналогичным способом, и их решение дает искомые коэффициенты.
Вопросы для самопроверки
1. Какие основные этапы можно выделить в модельном исследовании (построении модели)?
2. Какие существуют два основных способа формирования модели?
3. В чем заключается аналитический способ построения модели?
4. В чем заключается задача идентификации технических объектов?
5. Какой эксперимент называют активным; пассивным?
6. Какие выделяют три класса задачи идентификации технических объектов?
7. Как формулируется задача интерполяции функций?
8. Как формулируется задача аппроксимации функций?
9. Как вычислить коэффициенты полинома степени m при квадратичной аппроксимации?
10. Какие функции допускают приведение задачи приближения функций к линейной ?
| |
|
из
5.00
|
Обсуждение в статье: Методы идентификации технических объектов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы