 |
Главная |


ЛЕКЦИЯ 25. Применение КИМ типа «ломающая рука «Romer» при монтаже СП
|
из
5.00
|
Технология монтажа СП с использованием МУММ предполагает позиционирование базовых элементов в пространстве СП с помощью позиционирующих устройств (позиционеров) и инструментальных средств контроля - контрольно-измерительных машин (КИМ).
1. Контрольно-измерительные системы, применяемые при монтаже СП
При выполнении позиционирования инструментальный контроль пространственных координат можно выполнять с помощью следующих контрольно-измерительных систем:
- стационарной КИМ, типа Winner. При этом элементы каркаса сборочного приспособления должны быть размещены на рабочем столе КИМ;
- переносной КИМ типа «ломающаяся рука», например фирмы Romer. В этом случае монтаж базирующих элементов может производиться непосредственно в пространстве СП, установленного на стационарном фундаменте;
- лазерной оптической теодолитной системы (ЛОТС), например фирмы Leica. Это устройство также позволяет производить монтаж непосредственно в пространстве СП. Однако ЛОТС по мобильности значительно уступает переносной КИМ. Кроме того, ЛОТС требует обязательной свободы пространства стапеля для прохода оптических осей лучей визирования, что довольно трудно обеспечить в условиях плотного компоновочного пространства стапеля, особенно в условиях выполнения монтажных работ.
В качестве контрольно-измерительной системы выберем КИМ типа «ломающаяся рука» фирмы «Romer». Данная КИМ обеспечивает максимальную мобильность при монтаже сборочной оснастки.
Конструкция КИМ «Romer» показана на рис. 25.1.
| Кнопка |
| Штанга |
| Щуп |
| Пружинный демпфер |
| Балансир |
| Вычислительный блок |
| Основание КИМ |
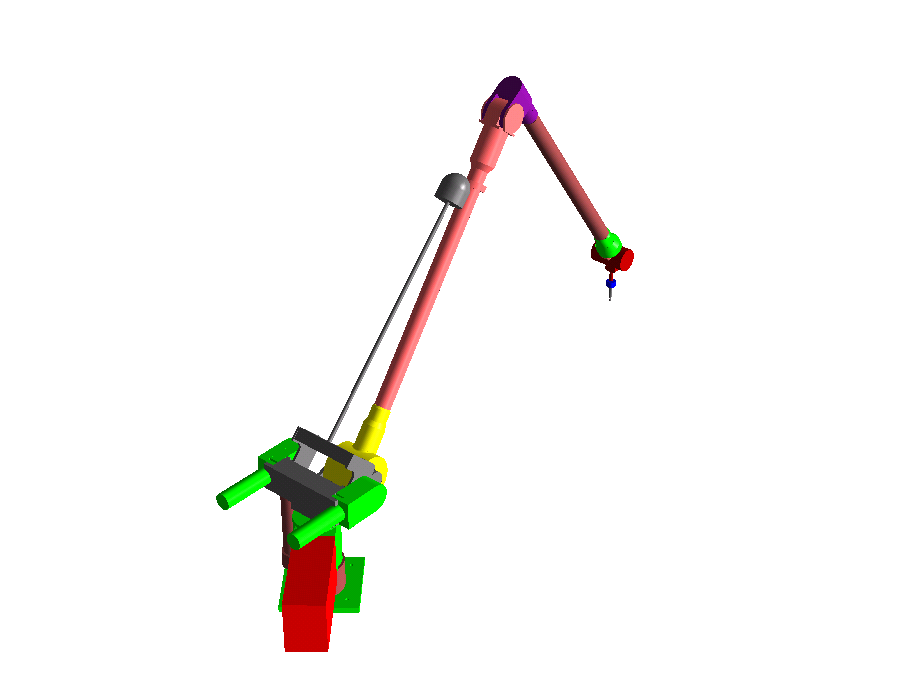
Рис. 25.1. Конструкция КИМ «Romer»
Максимальная длина вытянутой «руки» КИМ – 3 метра. Погрешность измерений – 0.1 мм. Подвод щупа к точке замера производится вручную. «Считывание» координат точки происходит в момент нажатия кнопки расположенной на шарнире щупа. Для крепления КИМ в основании предусмотрено 4 отверстия диаметром 6 мм.
Возможны следующие варианты использования КИМ:
- КИМ закреплена на неподвижной опоре;
- КИМ переставляется с помощью штатива;
- КИМ поочередно переставляется на заранее установленные площадки. Рассмотрим каждый вариант в отдельности.
В первом случае КИМ закрепляется на неподвижной опоре с помощью струбцин или винтами. Производится привязка координатной системы КИМ к координатной системе измеряемого объекта. Измеряемое пространство ограничивается досягаемостью «руки». При перестановке КИМ требуется повторная привязка к системе координат измеряемого объекта.
Во втором случае зона измерений существенно увеличивается. КИМ закрепляется на специальном штативе. Производится привязка к системе координат измеряемого объекта. Далее, по мере необходимости, КИМ перемещается с помощью штатива в новое положение. При этом нет необходимости заново привязываться к выбранной системе координат.
Еще более увеличить зону промеряемого пространства позволяет третий вариант использования КИМ. Вокруг объекта измерений устанавливаются специальные стойки с учетом досягаемости «руки» КИМ до требуемых зон и лазерное сканирующее устройство. Лазерное сканирующее устройство подключается к управляющей ЭВМ КИМ. На одну из стоек устанавливается целевой знак (рис. 25.2).


Рис. 25.2. Установка стоек, лазерного сканера и целевого знака
Запускается лазерное сканирующее устройство. Оно отслеживает перемещение специального маркера, который поочередно устанавливается в трех точках целевого знака. Стойка с целевым знаком предварительно принимается за начало отсчета. Далее целевой знак переставляется на следующую стойку и производится определение ее координат относительно базовой стойки с помощью лазерного сканера. Координаты автоматически записываются в память управляющей ЭВМ. Данная операция повторяется до тех пор, пока не будут определены координаты всех стоек (рис. 25.3).






Рис. 25.3. Определение координат стоек
На базовую стойку устанавливается КИМ. Производится увязка координатных систем КИМ и объекта измерений. При этом происходит автоматический пересчет координат остальных стоек относительно координатной системы объекта измерений. Далее производятся необходимые измерения. КИМ при этом переставляется по стойкам в любой последовательности (рис. 25.4).




Рис. 25.4. Установка КИМ и произведение замеров
2. Способы позиционирования при монтаже СП
Решение задачи позиционирования может выполняться двумя способами: прямым и обратным.
Прямое позиционирование предполагает наличие некоторого позиционера, позволяющего производить перемещение базирующего элемента и связанного с ним переходного калибра в пространстве стапеля по шести координатам с текущим контролем координат опорных точек конструктивных баз , например с помощью КИМ «Romer». Практически этот способ используется в традиционном производстве, где в качестве позиционирующего устройства используется система винтовых домкратов. Выполняя последовательные линейные перемещения по различным направлениям с помощью винтов, производят текущий контроль положения опорных баз базирующих элементов сборочной оснастки. Несмотря на чрезвычайную простоту, этот способ отличается низкой производительностью из-за необходимости выполнения большого числа последовательных приближений (итераций). Кроме того, для размещения винтовых домкратов необходимо создание специальных, а в ряде случаев, уникальных опорных элементов. Повышение производительности при прямом позиционировании можно добиться, используя манипулятор промышленного робота (рис. 25.5). Однако это сопряжено с большими производственными издержками.

Рис. 25.5. Прямое позиционирование базирующего элемента с помощью манипулятора
промышленного робота.
Обратное позиционирование заключается в том, что расчетное положение координат опорных точек конструктивных баз базирующих элементов сборочной оснастки (назовем их монтажными базовыми точками) задается в пространстве стапеля независимо с помощью носителей опорных точек позиционирующего устройства (назовем их опорными базовыми точками). Затем носители монтажных базовых точек конструктивных баз базирующих элементов совмещаются с соответствующими носителями опорных базовых точек позиционирующего устройства, обеспечивая, таким образом, заданное пространственное положение базирующего элемента (рис. 25.6). Такой способ не требует комплексных манипуляций по шести степеням свободы, а только независимых перемещений по трем координатам, исключая итерационные процедуры.
Рис. 25.6. Схема обратного позиционирования базирующего элемента
В основу конструкции позиционирующего устройства заложен принцип обратного позиционирования. В качестве опорной схемы принято устройство, определяющее базовую плоскость позиционирования по трем точкам. Задачей конструктивной разработки является устройство, выполняющее раздельное позиционирование трех точек пространства (в общем случае произвольных), используя локальный модуль трехкоординатных перемещений для каждой точки позиционирования – модуль одноточечного позиционирования.
3. Конструкция позиционирующего устройства
При выполнении монтажа сборочной оснастки по принципу обратного позиционирования наиболее предпочтительным является способ прямого базирования, когда опорные базовые точки определяются непосредственно на конструктивных поверхностях базирующих элементов сборочной оснастки. Однако, учитывая то, что на сегодняшний день вся сборочная оснастка на предприятии изготовлена и смонтирована по традиционной технологии, необходимо максимально сохранить преемственность технологических и конструктивных решений. В связи с этим в качестве основного способа базирования при опытной отработке технологии безэталонного монтажа принят способ косвенного базирования, когда базовые опорные точки назначаются не на поверхностях устанавливаемых изделий, а на промежуточном элементе - монтажной площадке 1, который включает в себя носители базовых точек косвенного базирования 2 (рис. 25.7).
Сам же позиционер включает три модуля одноточечного позиционирования 3, управляющие положением носителя опорной точки 4. Эти модули скомпонованы на специальной металлической плите – рабочей площадке 5, и размещены на ней так, что при взаимно параллельном положении плоскостей монтажной 1 и рабочей 5 площадок носители их базовых точек полностью совмещаются. Для реализации возможности ориентации базирующего элемента в пространстве стапеля каждый из модулей одноточечного позиционирования должен иметь возможность перемещения по линейным координатам X,Y,Z, а также возможность поворота вокруг этих координатных осей в пределах ±10о.
Таким образом, для реализации этих возможностей каждый модуль одноточечного позиционирования должен иметь возможность перемещения по трем линейным координатам X,Y,Z в пределах ± 10 … 20 мм относительно нейтрального положения. На монтажной площадке, через переходные фитинги, закрепляется монтируемый базирующий элемент. Крепление к монтажной площадке осуществляется с помощью «классных» болтов по отверстиям 6 диаметром 18 мм. После совмещения опорной и монтажной базовых точек рабочая и монтажная площадки взаимно фиксируются с помощью винтовых пар.
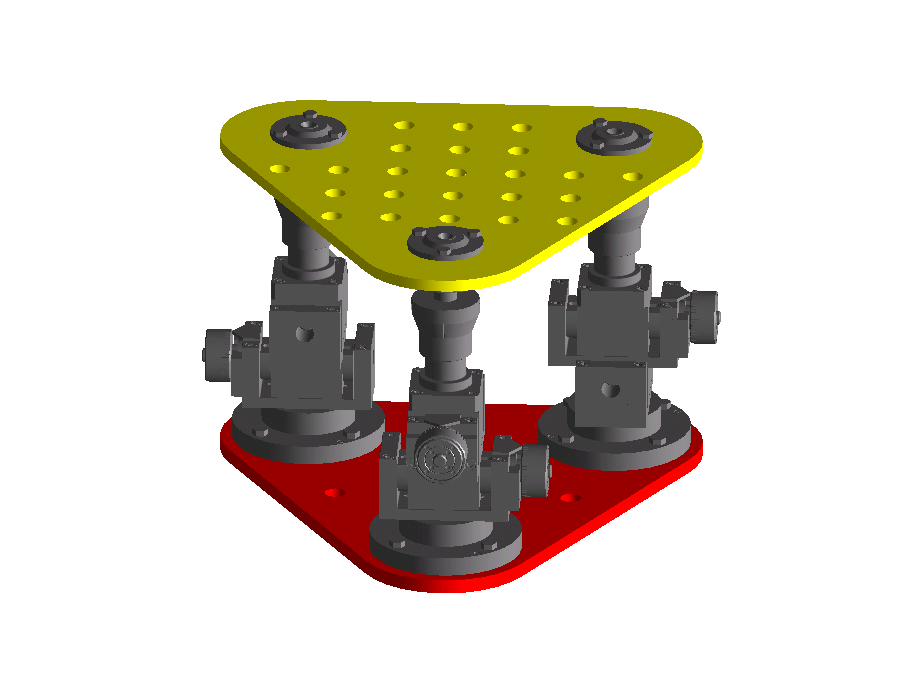
Рис. 25.7. Компоновочная схема позиционера.
Модуль одноточечного позиционирования включает два основных элемента:
- носитель опорной базовой точки;
- устройство линейных перемещений носителя базовой точки по трем взаимно перпендикулярным осям.
Носитель опорной базовой точки выполняет следующие основные функции:
- задает в координатной системе стапеля положение координат одной из базовых точек объекта позиционирования;
- обеспечивает сопряжение с наконечником щупа КИМ «Romer» в процессе контроля текущих координат опорной базовой точки с минимальными погрешностями сопряжения;
- служит для совмещения с носителем монтажной базовой точкой объекта позиционирования (собственно базирующего элемента или монтажной площадки), обеспечивая при этом возможность поворота относительно друг друга в пределах ± 10о;
- обеспечивает фиксацию рабочей и монтажной площадок после позиционирования на время закрепления базирующего элемента на каркасе стапеля.
Устройство линейных перемещений носителя опорной базовой точки включает в себя три модуля линейных перемещений по трем координатным осям X, Y, Z. Каждый модуль имеет направляющие, вдоль которых перемещается ползун, и привод перемещения ползуна. Дополнительно модуль должен быть оснащен устройством выборки люфтов для винтовых приводов перемещения ползуна, а также устройством блокировки модуля в заданной позиции.
Компоновка устройства линейных перемещений является классической: два модуля горизонтальных перемещений по осям X и Y расположены один на другом и обеспечивают относительное перемещение в двух взаимно перпендикулярных направлениях. На верхнем из них (модуль перемещения вдоль оси Y) располагается модуль вертикального перемещения вдоль оси Z, на котором устанавливается носитель опорной базовой точки (рис. 25.8).
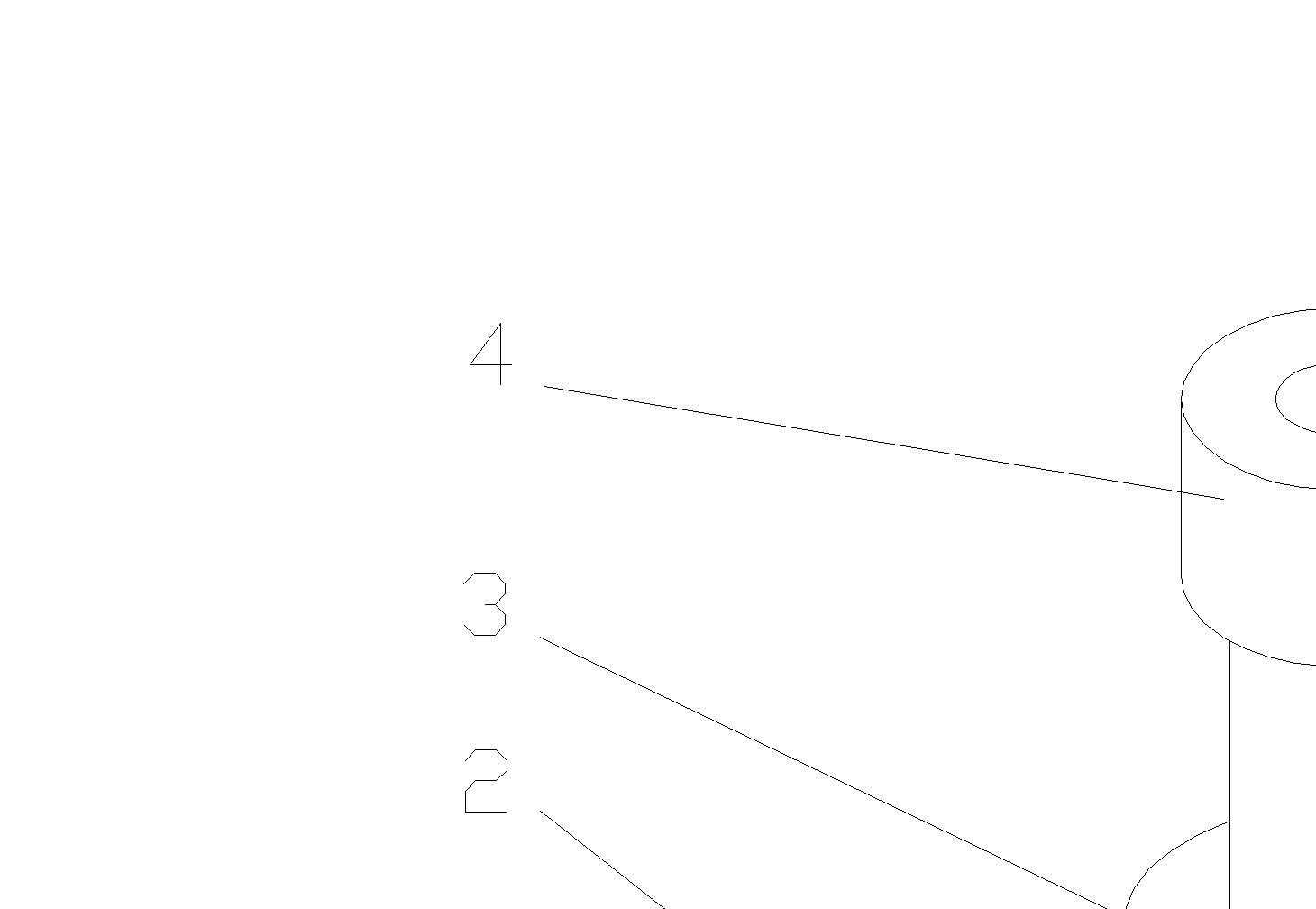
Рис. 25.8. Компоновочная схема устройства линейных перемещений носителя опорной базовой точки: 1 – модуль перемещения вдоль оси Х; 2 – модуль перемещения вдоль оси Y; 3 – модуль перемещения вдоль оси Z; 4 – носитель опорной базовой точки
Конструкция модуля линейных перемещений во многом определяется выбором конструктивной схемы кинематической пары «направляющие – ползун» предназначенной для обеспечения собственно линейных перемещений и связанного с ней привода. При этом выбор типа привода существенно влияет на выбор кинематической пары линейных перемещений.
В качестве привода линейных перемещений принята кинематическая пара «винт – гайка». Этот привод наиболее технологичен в изготовлении и позволяет обеспечивать перемещения с малыми контролируемыми приращениями (около 0,01 мм).
|
из
5.00
|
Обсуждение в статье: ЛЕКЦИЯ 25. Применение КИМ типа «ломающая рука «Romer» при монтаже СП |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы