 |
Главная |


ЛЕКЦИЯ 26. Применение КИМ типа «ломающая рука «Romer» при монтаже СП (продолжение)
|
из
5.00
|
1. Примеры монтажа элементов СП с помощью позиционера и КИМ
На рис. 26.1 показан монтаж фиксатора. Крепление фиксатора к монтажной площадке позиционера осуществляется через переходной фитинг и монтажную пластину.
Для этого в фиксаторе имеются технологические отверстия и технологическая плоскость. В принципе можно обойтись и без переходных фитингов, соответственно переработав конструкцию фиксатора. Однако это может усложнить его конструкцию, соответственно возникнут трудности при изготовлении и эксплуатации. Поэтому более целесообразно применять переходные фитинги, сведя к минимуму изменения в типовых конструкциях фиксаторов, упоров, прижимов и т.д.
Еще один пример монтажа фиксатора показан на рис. 26.2.
На рис. 26.3 показан возможный вариант монтажа удлиненного уха, а на рис. 26.4 показан монтаж вилки.
Для монтажа рубильников и ложементов возможен иной вариант использования позиционера. Модули одноточечного позиционирования располагаются не на одной плите, а в разных точках (рис. 26.5). Однако в этом случае возникает проблема с фиксацией модулей в пространстве. Потребуется три неподвижных площадки для установки модулей вместо одной.
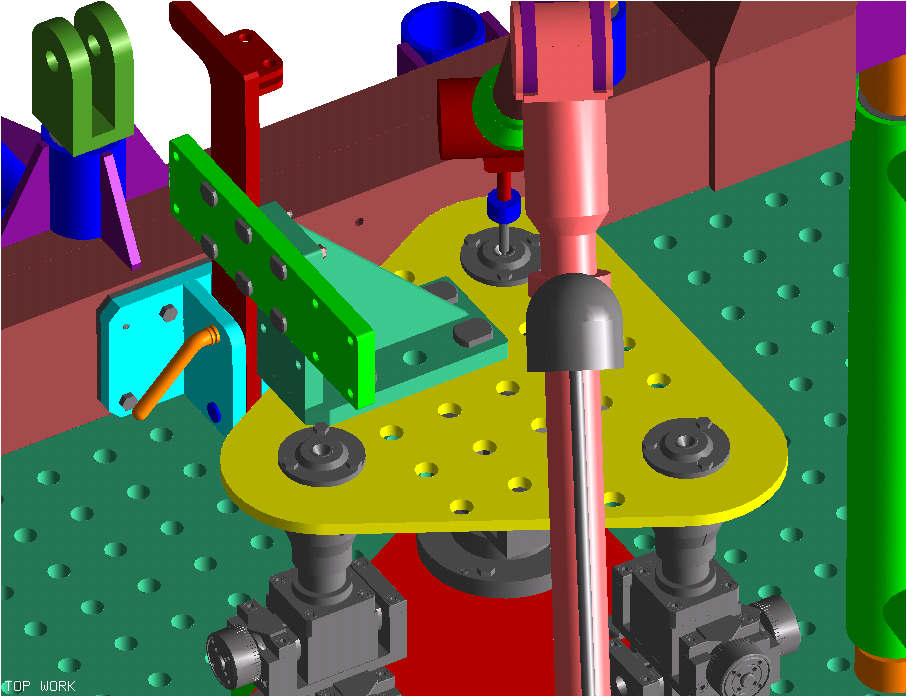
Рис. 26.1. Монтаж фиксатора: 1- позиционер; 2- «классный» болт; 3- фитинг и монтажная пластина; 4- фиксатор; 5- кронштейн фиксатора; 6- КИМ «Romer»

Рис. 26.2. Пример монтажа откидного фиксатора
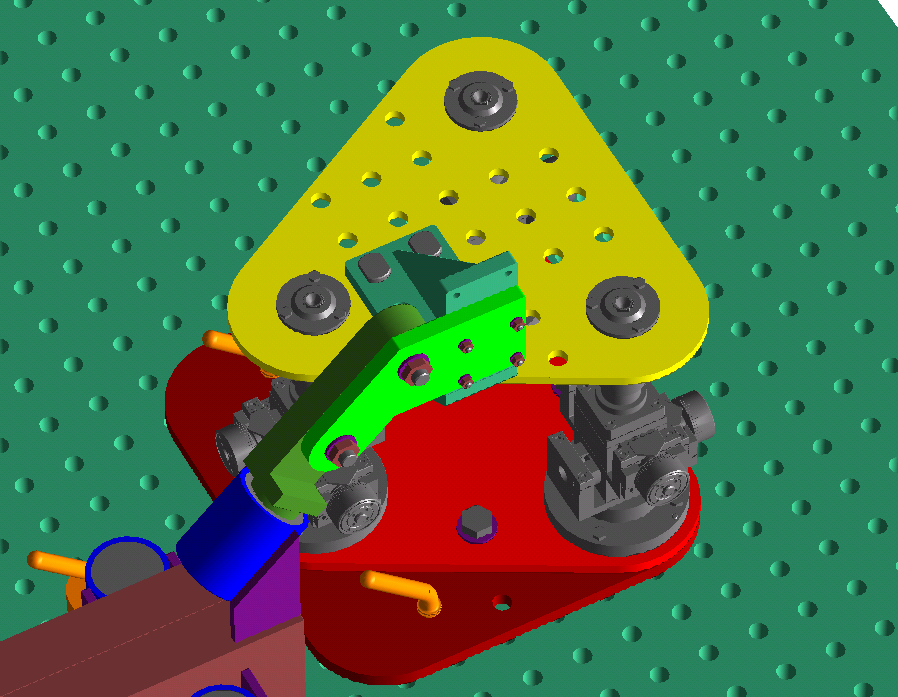
Рис. 26.3. Монтаж удлиненного уха


Рис. 26.4. Монтаж вилки Рис. 26.5. Пример монтажа
ложемента
2. Задание координатной системы для выполнения контрольно-измерительных работ
Проектирование СП с использованием CAD/CAE/CAM систем и МУММ подразумевает использование системы координат единой для всего самолета. Однако это создаст определенные неудобства при монтаже СП. В связи с этим принимается еще одна система координат – система координат стапеля. Для задания этой системы в процессе проектирования в конструкции стапеля предусматриваются специальные реперные площадки (не меньше трех). Одна из этих площадок принимается за начало координат стапеля. Относительно этой реперной площадки задаются координаты точек позиционера при монтаже.
Рассмотрим взаимную увязку координатных систем стапеля, позиционера и КИМ при монтаже.
Рама стапеля закрепляется неподвижно на ровной поверхности (например на координатной плите). В соответствии с КЭМ (конструктивный электронный макет) монтажа закрепляется КИМ на неподвижной жесткой опоре. Далее с помощью КИМ определяются координаты отверстий трех реперных площадок стапеля (в системе координат КИМ). По центрам этих отверстий задается вертикальная плоскость (Z-0-X). Касанием щупа КИМ горизонтальных поверхностей двух реперных площадок (включая базовую) задается уровень горизонтальной плоскости (Y-0-X). Последняя плоскость (Z-0-Y) проводится через центр отверстия базовой реперной площадки. Начало отсчета переносится в точку пересечения плоскостей, то есть происходит увязка систем координат стапеля и КИМ.
Позиционер закрепляется в пространстве стапеля на жесткой опоре в соответствии с КЭМ монтажа. Причем положение его задается с помощью простых мерительных инструментов (линейка, рулетка). Точного положения носителей опорных базовых точек позиционера добиваются путем вращения винтов модулей линейного перемещения и замеров с помощью КИМ.
На основании вышеизложенного следует:
- при проектировании СП необходим опредусмотреть в конструкции СП наличие реперных площадок для задания и увязки систем координат СП и КИМ;
- предусмотреть в конструкции базирующих элементов СП технологические плоскости и отверстия для крепления их через переходные фитинги на плите позиционера.
Вопросы для самоконтроля:
1. Какие типы КИМ используются при монтаже СП?
2. Какие варианты использования КИМ «Romer» существуют при монтаже СП?
3. Как производится увязка координат КИМ и координат объекта измерений?
4. Какие способы позиционирования существуют при монтаже СП?
5. Из каких основных элементов состоит позиционер (один из вспомогательных вариантов), используемый при монтаже СП?
6. Какие дополнительные элементы необходимы для монтажа базовых элементов СП при использовании КИМ «Romer»?
7. Какие варианты применения позиционеров существуют при монтаже СП?
|
из
5.00
|
Обсуждение в статье: ЛЕКЦИЯ 26. Применение КИМ типа «ломающая рука «Romer» при монтаже СП (продолжение) |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы