 |
Главная |


Теорема о жестком рычаге Н.Е. Жуковского
|
из
5.00
|
ЛЕКЦИЯ 6
Краткое содержание
Силовой расчет начального механизма. Определение уравновешивающей силы и уравновешивающего момента. Теорема Н.Е. Жуковского о жестком рычаге.
Силовой расчет начального механизма
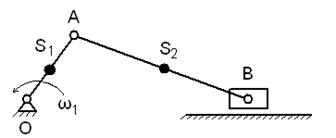
Начальный механизм состоит из ведущего звена, которое входит во вращательную или поступательную кинематическую пару со стойкой.
Кинематическая цепь будет статически определима при условии  . Начальный механизм при n = 1 и p1 = 1 не будет находиться в равновесии. Для того, чтобы начальный механизм находился в равновесии, необходимо дополнительно ввести уравновешивающую силу
. Начальный механизм при n = 1 и p1 = 1 не будет находиться в равновесии. Для того, чтобы начальный механизм находился в равновесии, необходимо дополнительно ввести уравновешивающую силу  или уравновешивающий момент
или уравновешивающий момент  , которые бы уравновесили все силы и моменты, приложенные к ведущему звену.
, которые бы уравновесили все силы и моменты, приложенные к ведущему звену.
Уравновешивающая сила или уравновешивающий момент являются такой силой или моментом, которые должны быть приложены к ведущему звену, чтобы механизм двигался по заданному закону или удерживался в заданном положении.
Что действует на ведущее звено или - зависит от способа передачи энергии от электродвигателя к валу кривошипа. Возможны следующие случаи.
1. Коленчатый вал двигателя соединяется с валом рабочей машины муфтой (рис.6.1). В этом случае к валу приложен уравновешивающий момент . 
Электродвигатель.
рис. 6.1.
Пример 6.1
Дано:
Масса звена: m1=2 кг. Ускорения центра масс звена:,  = 2,95 м/с2.
= 2,95 м/с2.
1).Определение силы тяжести звена:
 =
=  н.
н. 
2).Определение силы инерции:
 =
=  н.
н.
Сила инерции направлена в противоположную сторону ускорению .
Построим начальный механизм в масштабе 1:5.
Покажем все действующие на него силы, неизвестную реакцию R61 и уравновешивающий момент
1.Найдем величину уравновешивающего момента .
Запишем уравнение моментов всех сил относительно точки О1.

План сил для начального механизма 

Уравновешивающий момент равен:
Здесь  . Длины плеч h1 и h2 измерены на расчетной схеме и умножены на масштаб.
. Длины плеч h1 и h2 измерены на расчетной схеме и умножены на масштаб.
2.Найдем реакцию R61.
Составим векторное уравнение равновесия всех сил, действующих на начальный механизм.

Выберем масштаб плана сил mF= 0,5  .
.
Вычислим величины отрезков, соответствующих векторам сил. Данные занесем в таблицу 1:
Таблица 1
| Обозначение силы | 
| 
| 
| 
|
| Величина силы, н | ||||
| Отрезок на плане, мм |
Строим план сил. В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам  ,
,  ,
,  . Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию . Измеряя его длину и умножая на масштаб mF, получим величину реакции . Данные занесены в таблицу 1.
. Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию . Измеряя его длину и умножая на масштаб mF, получим величину реакции . Данные занесены в таблицу 1.
2.Вал двигателя соединяется с валом рабочей машины при помощи зубчатой передачи (рис.6.2). В этом случае к валу двигателя приложена уравновешивающая сила, которая действует по линии зацепления.
Зубчатый
Электродвигатель механизм

Рис. 6.2
Пример 6.2.
Дано:
Масса звена: m1=2 кг. Ускорения центра масс звена:, = 2,95 м/с2.
1).Определение силы тяжести звена:
= н.
2).Определение силы инерции:
= н.
Сила инерции направлена в противоположную сторону ускорению .
Построим начальный механизм в масштабе 1:5.
Покажем все действующие на него силы, неизвестную реакцию R61 и уравновешивающую силу Fур, которую приложим перпендикулярно кривошипу АО1 в точке А.
План сил для начального механизма

1.Найдем величину уравновешивающей силы Fур.
Запишем уравнение моментов всех сил относительно точки О1.
Уравновешивающая сила Fур равна:
Здесь . Длины плеч h1 и h2 измерены на расчетной схеме и умножены на масштаб.
2.Найдем реакцию R61.
Составим векторное уравнение равновесия всех сил, действующих на начальный механизм.
.
Выберем масштаб плана сил mF=0,5 .
Вычислим величины отрезков, соответствующих векторам сил. Данные занесем в таблицу 2:
Таблица 2
| Обозначение силы |
|
|
| 
|
|
| Величина силы, н | |||||
| Отрезок на плане, мм |
Строим план сил. В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам , , ,  . Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию . Измеряя его длину и умножая на масштаб mF, получим величину реакции . Данные занесены в таблицу 2.
. Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию . Измеряя его длину и умножая на масштаб mF, получим величину реакции . Данные занесены в таблицу 2.
Теорема о жестком рычаге Н.Е. Жуковского
Н.Е.Жуковский показал, что равновесию механизма с одной степенью свободы соответствует равновесие некоторого рычага, и предложил способ построения и нагружения такого рычага. Теорему Н.Е.Жуковского можно сформулировать так:
Если векторы всех сил, приложенных к различным точкам звеньев и уравновешенных на механизме, перенести параллельно самим себе в одноимённые точки повёрнутого на 90° плана скоростей, приняв фигуру плана за жесткий рычаг, то сумма моментов всех указанных сил относительно полюса плана будет равна нулю.
Пример 6.3.
Для кривошипно-ползунного механизма определить уравновешивающую силу  .
.
Решение.
1.Уравновешивающую силу приложим в точке А перпендикулярно кривошипу АО. Построим
план скоростей и повернем его на 90°. В соответствующих точках плана скоростей приложим векторы сил, сохраняя их направления, момент  заменим парой сил
заменим парой сил  и каждую силу перенесем на план.
и каждую силу перенесем на план.
2.Составим уравнение моментов всех сил относительно полюса  :
:
 .
.
Решая уравнение, получим:
Длины всех плеч измерены на расчетной схеме .
План скоростей, повернутый на 90○
План скоростей
Таким образом, с помощью теоремы Жуковского можно:
1.Определить уравновешивающую силу , не проводя силового расчета;
2.Проверить значение уравновешивающей силы , полученной из силового расчета. Погрешность расчетов составляет  %. Погрешность не должна превышать 20 %.
%. Погрешность не должна превышать 20 %.
|
из
5.00
|
Обсуждение в статье: Теорема о жестком рычаге Н.Е. Жуковского |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы