 |
Главная |


Последовательность в этой системе управления
|
из
5.00
|
Позиция вентиля влияет на скорость потока (расход) внутри трубы
- Количество пара определяет количество теплоты, проходящее через ванну
- Температура в ванне растёт, если поступление теплоты больше, чем потери теплоты
- Температура в ванне убывает, если поступление теплоты меньше, чем потери теплоты
Эта последовательность даёт отношение между входными и выходными параметрами.
Согласно DIN 19226 это процесс, где управляемая переменная процесса (PV) постоянно отслеживается (считывается) и сравнивается с заданной переменной (SP). В зависимости от результата этого сравнения входная величина системы оказывает влияние на регулирование выходной величины до заданной переменной, несмотря на все возмущающие влияния. Такая обратная связь осуществляется в системах с замкнутым контуром управления.
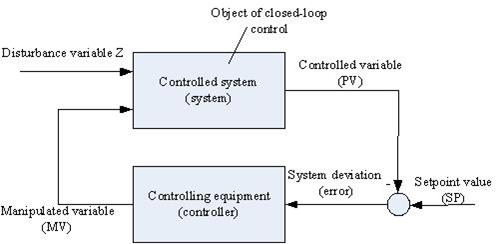
Исполнительный элемент(Actuating element) - пусковой элемент, обычно просто называемый приводом, размещается на входе регулируемой системы и является одним из функциональных блоков системы для влияния на поток массы или энергии. Его входной переменной является управляемая переменная.
Контроллер (Controller) -это функциональный блок, состоящий из компаратора и управляющего элемента.
Компаратор(Comparator) - это функциональный блок, который формируетсигнал ошибкиe из опорной переменной и переменной обратной связи.
Сигнал ошибки (Error signal) -разность между опорной переменной и переменной обратной связи (измеренной переменной).
Желаемая величина процесса, уставка (SP) разность (SP – PV) = ошибка.
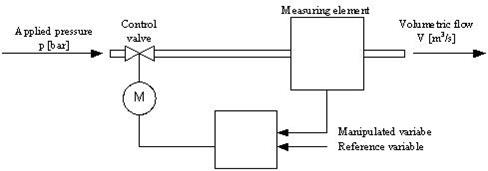
Расход жидкости (выходная величина) должен поддерживаться на уровне ранее рассчитанной величины расхода (SP) . Первичное измерение сделано, преобразовано в электрический сигнал. Этот сигнал идёт в PLC и сравнивается с (SP). Сравнение выполняется вычитанием измеренной величины из желаемой. Результат – это отклонение (рассогласование) – deviation.
Что касается автоматического управления вентилем, если имеется отклонение, чтобы убрать deviation, требуется электрический двигатель (шаговый) или пропорциональный соленоид. Это позволяет регулировать управляемую величину. Эта часть системы называется исполнительным (воздействующим) элементом. Manipulated element – воздействующий элемент. PLC теперь посылает сигнал на воздействующий элемент. Его величина зависит от отклонения. Если большое (-) отклонение, при котором измеряемая величина много больше, чем установленная, вентиль должен закрываться. Если большое (+) отклонение, т.е. PV много меньше SP, вентиль должен открываться.
Выходное воздействие (выходная переменная) не идеально.
- Eсли вмешательство слишком большое и слишком быстрое, то влияние входной переменной на систему очень большое. Это вызывает большие колебания на выходе.
- Если влияние маленькое и выходная величина медленная, то только ограничиваются желаемой величиной.
Управляющая переменная( Manipulated variable) -выходная переменная прибора управления с незамкнутым или замкнутым контуром управления, и в то же самое время, входная переменная регулируемой системы. Она передает управляющее действие прибора на регулируемую систему.
В нашем примере приложенное давление меняет объёмный расход и поэтому требуется изменение положения в установке вентиля. Такое влияние называется возмущающей переменной Z. Управляемая система – часть управляемого процесса или машины, в которой Х должна поддерживаться на значении предустановленной величины (SP). Управляемая система должна быть представлена как система с управляемой величиной в качестве выходной переменной и управляющей величиной в качестве входной переменной.
Пример
Система труб, внутри которых течёт газ, и управляющий вентиль образуют управляемую систему. Результат сравнения (SP) и (PV) - отклонение, ошибка. Ответ «response» показывает, как система реагирует на изменение входной величины. Определение выходного управляющего воздействия – одна из задач технологии управления в системах с замкнутым контуром.
Контроллер имеет задачу поддержания управляемой величины PV как можно ближе к SP. Он постоянно сравнивает эти две величины. Из этого сравнения и из ответа системы PLC вычисляет и изменяет величину выходного управляющего воздействия. Воздействующий элемент (регулирующий орган) регулирует управляемую величину. Этот элемент обычно специальный сервопривод. Сервопривод требуется обычно, если у PLC нет возможности управлять выходом непосредственно. В нашем примере воздействующий элемент - это вентиль.
Для того, чтобы управляемая величина обрабатывалась PLC, она должна быть измерена и преобразована в физическую переменную, которую PLC считывает как входной сигнал.
Управляемая система – часть управляемого процесса или машины, в которой PV должна поддерживаться на значении предустановденной величины (SP) и в которой выходное управляющее воздействие компенсирует все возмущения. Входные переменные системы управления включают не только выходное управляющее воздействие, но и возмущающие воздействия. Прежде чем PLC может быть определён для управляемой системы, должно быть известно поведение управляемой системы.
|
из
5.00
|
Обсуждение в статье: Последовательность в этой системе управления |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы