 |
Главная |


Вектор-функция скалярного аргумента. Производная
|
из
5.00
|
Пусть множество значений вектор-функции скалярного аргумента  приведено к общему началу в точке 0. Совместим с этой точкой начало декартовой системы координат. Тогда для любого
приведено к общему началу в точке 0. Совместим с этой точкой начало декартовой системы координат. Тогда для любого  вектор может быть разложен по ортам
вектор может быть разложен по ортам 

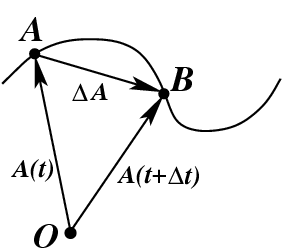
Таким образом, задание вектор-функции скалярного аргумента означает задание трех скалярных функций  При изменении значения аргумента конец вектора будет описывать в пространстве кривую, которая называется годографом вектора
При изменении значения аргумента конец вектора будет описывать в пространстве кривую, которая называется годографом вектора
Пусть для существует близкое значение  Тогда производной вектор-функции поскалярному аргументу называется
Тогда производной вектор-функции поскалярному аргументу называется 
№17 Скорость и ускорение точки в криволинейном движении
Скорость
Скорость, вводится как характеристика движения материальной точки. Скорость является векторной величиной, которая характеризуется как быстротой движения (модуль вектора скорости), так и его направление (направление вектора скорости) в данный момент времени. Пусть материальная точка движется по какой-либо криволинейной траектории, при этом в момент времени t ей соответствует радиус-вектор r0 (рис. 1). За малый отрезок времени Δt точка совершит путь Δs и при этом получит элементарное (бесконечно малое) перемещение Δr.
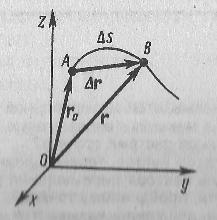
Рис.1
Вектором средней скорости <r> называется отношение приращения Δr радиуса-вектора точки к промежутку времени Δt:
 (1)
(1)
Направление вектора средней скорости совпадает с направлением Δr. При бесконечном уменьшении Δt средняя скорость стремится к значению, которое называется мгновенной скоростью v:

Значит, мгновенная скорость v есть векторная величина, которая равна первой производной радиуса-вектора движущейся точки по времени. Т.к. в пределе секущая совпадает с касательной, то вектор скорости v направлен по касательной к траектории в сторону движения (рис. 2).
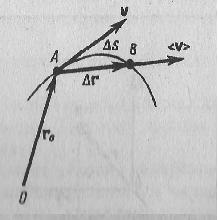 Рис.2
Рис.2
При уменьшении Δt, Δs все сильнее будет приближаться к |Δr|, поэтому модуль мгновенной скорости

Значит, модуль мгновенной скорости равен первой производной пути по времени:
 (2)
(2)
При неравномерном движении модуль мгновенной скорости различен в разные моменты времени. В этом случае применяют скалярную величину <r> — среднюю скорость неравномерного движения:

Если проинтегрировать по времени в пределах от t до t+Δt выражение ds=vdt (см. формулу (2)), то найдем длину пути, пройденного точкой за время Δt:
 (3)
(3)
В случае равномерного движения числовое значение мгновенной скорости постоянно; Toгда выражение (3) примет вид
Длина пути, пройденного точкой за промежуток времени от t1 до t2, задается интегралом

УСКОРЕНИЕ
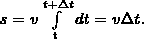
При неравномерном движения частно необходимо знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, называется ускорение. Рассмотрим плоское движение - движение, при котором траектории каждой точки рассматриваемой системы лежат в одной плоскости. Пусть вектор v есть скорость точки А в момент времени t. За время Δt точка перешла в положение В и получила скорость, отличную от v как по модулю, так и направлению и равную v1+Δv. Перенесем вектор v1 в точку А и найдем Δv (рис. 1).
Средним ускорением неравномерного движения в интервале от t до t+Δt называется векторная величина, равная отношению изменения скорости Δv к интервалу времени Δt:

Мгновенным ускорением а (ускорением) материальной точки в момент времени t будет векторная величина:

равная первой производной скорости по времени.
Разложим вектор Δv на две составляющие. Для этого из точки А (рис. 1) по направлению скорости v отложим вектор AD, по модулю равный v1. Очевидно, что вектор CD, равный Δvτ, определяет изменение скорости за время Δt по модулю : Δvτ=v1-v. Вторая же составляющая Δvn вектора Δv характеризует изменение скорости за время Δt по направлению.
Тангенциальная составляющая ускорения:

т. е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Ищем вторую составляющую ускорения. Допускаем, что точка В сильно близка к точке А, поэтому Δs можно считать дугой окружности некоторого радиуса r, слабо отличающейся от хорды АВ. Треугольников АОВ подобен треугольнику EAD, из чего следует Δvn/AB=v1/r, но так как AB=vΔt, то

В пределе при Δt→0 получим v1→v.
Рис.1
Т.к. v1→v, угол EAD стремится к нулю, а т.к. треугольник EAD равнобедренный, то угол ADE между v и Δvn стремится к прямому. Следовательно, при Δt→0 векторы Δvn и v становятся взаимно перпендикулярными. Т.к. вектор скорости направлен по касательной к траектории, то вектор Δvn, перпендикулярный вектору скорости, направлен к центру кривизны траектории точки. Вторая составляющая ускорения, равная

называется нормальной составляющей ускорения и направлена по прямой перпендикулярной касательной к траектории (называемой нормалью) к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис. 2):

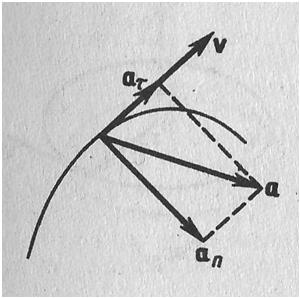
Рис.2
Значит тангенциальная составляющая ускорения является характеристикой быстроты изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения — характеристикой быстроты изменения скорости по направлению (направлена к центру кривизны траектории). В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1)aτ=0, an=0 — прямолинейное равномерное движение;
2)aτ=an=const, аn=0 - прямолинейное равнопеременное движение. При таком виде движения

Если начальный момент времени t1 = 0, а начальная скорость v1 = v0, то, обозначив t2=t и v2 = v, получим a=(v-v0)/t, откуда

Проинтегрировав эту формулу в пределах от нуля до произвольного момента времени t найдем, что длина пути, пройденного точкой, в случае равнопеременного движения

3)aτ=f(t), an=0 — прямолинейное движение с переменным ускорением;
4)aτ=0, an=const. При aτ=0 скорость по модулю не изменяется, а изменяется по направлению. Из формулы an=v2/r следует, что радиус кривизны должен быть постоянным. Следовательно, движение по окружности является равномерным;равномерное криволинейное движение;
5)aτ=0, an≠0 равномерное криволинейное движение;
6)aτ=const, an≠0 - криволинейное равнопеременное движение;
7)aτ=f(t), an≠0 - криволинейное движение с переменным ускорением.
№18 Уравнения касательной плоскости и нормали к поверхности
Определение. Пусть на области D задана функция двух переменных z =f(х,у), M0(x0;y0) - внутренняя точка области D, M(x0+Δx;y+Δy) - "соседняя" с M0 точка из D.
Рассмотрим полное приращение функции:

Если Δz представлено в виде:

где A, B - постоянные (не зависящие от Δx, Δy),  - расстояние между M и M0, α(Δ x,Δy) - бесконечно малая при Δx
- расстояние между M и M0, α(Δ x,Δy) - бесконечно малая при Δx  0, Δy 0; тогда функция z =f(х,у) называется дифференцируемой в точке M0, а выражение
0, Δy 0; тогда функция z =f(х,у) называется дифференцируемой в точке M0, а выражение

называется полным дифференциалом функции z =f(х;у) в точке M0.
Теорема 1.1. Если z =f(х;у) дифференцируема в точке M0, то

Доказательство
Так как в (1.16) Δx, Δy - произвольные бесконечно малые, то можно взять Δy =0, Δx≠0, Δx 0, тогда

после чего из (1.16) следует

Тогда

Аналогично доказывается, что

и теорема 1.1. доказана.
Замечание: из дифференцируемости z =f(х,у) в точке M0 следует существование частных производных. Обратное утверждение неверно (из существования частных производных в точке M0 не следует дифференцируемость в точке M0 ).
В итоге, с учётом теоремы 1.1 формула (1.18) примет вид:

Следствие. Функция, дифференцируемая в точке M0, непрерывна в этой точке (так как из (1.17) следует, что при Δx 0, Δy 0: Δz 0, z(M) z(M0)).
Замечание: Аналогично для случая трех и более переменных. Выражение (1.17) примет вид:

где
Используя геометрический смысл (рис.1.3) частных производных и можно получить следующее уравнение (1.24) касательной плоскости πкасs к поверхности: z =f(х,у) в точке C0(x0,y0,z0), z0=z(M):

Из сравнения (1.24) и (1.21) получаем геометрический смысл полного дифференциала функции двух переменных:

- приращение аппликаты z при движении точки С по касательной плоскости из точки С0 в точку

где  находится из (1.24).
находится из (1.24).
Уравнение нормали Lн к поверхности: z =f(х,у) в точке С0 получается, как уравнение прямой, проходящей через С0 перпендикулярно к касательной плоскости:

№ 19 Производная по направлению. Градиент
Пусть в некоторой области  задана функция
задана функция  и точка
и точка  . Проведем из точки
. Проведем из точки  вектор
вектор  , направляющие косинусы которого
, направляющие косинусы которого  . На векторе , на расстоянии
. На векторе , на расстоянии  от его начала рассмотрим точку
от его начала рассмотрим точку  , т.е.
, т.е.  .
.
Будем предполагать, что функция и ее частные производные первого порядка непрерывны в области .
Предел отношения  при
при  называется производной от функции в точке по направлению вектора и обозначается
называется производной от функции в точке по направлению вектора и обозначается  , т.е.
, т.е.  .
.
Для нахождения производной от функции в заданной точке  по направлению вектора
по направлению вектора  используют формулу:
используют формулу:  ,
,
где – направляющие косинусы вектора , которые вычисляются по формулам:  .
.
Пусть в каждой точке некоторой области задана функция .
Вектор, проекциями которого на оси координат являются значения частных производных этой функции в соответствующей точке, называется градиентом функции и обозначается  или
или  (читается «набла у»): .
(читается «набла у»): .
При этом говорят, что в области определено векторное поле градиентов.
Для нахождения градиента функции в заданной точке используют формулу:  .
.
№22 основные свойства неопределенного интеграла
Неопределенный интеграл

где F - первообразная функции f (на промежутке); C - произвольная постоянная.
Основные свойства
1. 
2. 
3. Если  то
то 
4. 
24) 
25) 
28) 
Этот метод применяется в тех случаях, когда подынтегральное выражение представляет собой произведение или частное разнородных ф-ций. При этом за V’(x) принимается та часть, которая легко интегрируется.
29) 
32)Разложение рациональной дроби на простейшие дроби.
Всякую правильную рациональную дробь  можно представить в виде суммы конечного числа простейших рациональных дробей первого – четвертого типов. Для разложения на простейшие дроби необходимо разложить знаменатель Qm(x) на линейные и квадратные множители, для чего надо решить уравнение:
можно представить в виде суммы конечного числа простейших рациональных дробей первого – четвертого типов. Для разложения на простейшие дроби необходимо разложить знаменатель Qm(x) на линейные и квадратные множители, для чего надо решить уравнение:
 - (5)
- (5)
Теорема. Правильную рациональную дробь , где  , можно единственным образом разложить на сумму простейших дробей:
, можно единственным образом разложить на сумму простейших дробей:
 - (6)
- (6)
(A1, A2, …, Ak, B1, B2, …, B1, M1, N1, M2, M2, …, Ms, Ns – некоторые действительные числа).
33) Разложение правильной дроби на простейшие дроби при комплексных корнях знаменателя
Постановка задачи. Найти неопределенный интеграл
1. Введем обозначения:


.
Сравним степени числителя и знаменателя .
Если подынтегральная функция – неправильная рациональная дробь, т.е. степень числителя n больше или равна степени знаменателя m, то сначала выделяем целую часть рациональной функции, поделив числитель на знаменатель:




Здесь многочлен – остаток от деления на причем степень Pk(x) меньше степени Qm
2. Разложим правильную рациональную дробь

на элементарные дроби.
 Если ее знаменатель имеет простые комплексные корни т.е.
Если ее знаменатель имеет простые комплексные корни т.е.

,
где

,
то разложение имеет вид

.
3. Для вычисления неопределенных коэффициентов ,A1,A2,A3...B1,B1,B3... приводим к общему знаменателю дроби в правой части тождества, после чего приравниваем коэффициенты при одинаковых степенях X в числителях слева и справа. Получим систему 2S уравнений с 2S неизвестными, которая имеет единственное решение.
4Интегрируем элементарные дроби вида

 47)Если существует конечный предел I интегральной суммы при λ → 0, и он не зависит от способа выбора точек ξ i, способа разбиения отрезка, то этот предел называется определенным интегралом от функции f (x)по отрезку [a, b] и обозначается следующим образом:
47)Если существует конечный предел I интегральной суммы при λ → 0, и он не зависит от способа выбора точек ξ i, способа разбиения отрезка, то этот предел называется определенным интегралом от функции f (x)по отрезку [a, b] и обозначается следующим образом:
,
или
.
 В этом случае функция f (x) называется интегрируемой на [a, b]. Числа a и b называются соответственно нижним и верхним пределами интегрирования, f (x) – подынтегральной функцией, х – переменной интегрирования. Следует заметить, что не имеет значения, какой буквой обозначена переменная интегрирования определенного интеграла
В этом случае функция f (x) называется интегрируемой на [a, b]. Числа a и b называются соответственно нижним и верхним пределами интегрирования, f (x) – подынтегральной функцией, х – переменной интегрирования. Следует заметить, что не имеет значения, какой буквой обозначена переменная интегрирования определенного интеграла
,
поскольку смена обозначений такого рода никак не влияет на поведение интегральной суммы. Несмотря на сходство в обозначениях и терминологии, определенный и неопределенный интегралы различны
48)Теорема о существовании определённого интеграла
Разобьем отрезок [a, b] на части точками x1,x2,x3... так что


 Обозначим через deltaX длину i-го кусочка и через максимальную из этих длин.
Обозначим через deltaX длину i-го кусочка и через максимальную из этих длин.


 Выберем на каждом отрезке произвольным образом некоторую точку так что (она называется «средней точкой»), и составим
Выберем на каждом отрезке произвольным образом некоторую точку так что (она называется «средней точкой»), и составим
величину, которая называется интегральной суммой
Найдем теперь предел
.

Определение. Если существует и он не зависит от
а) способа разбиения отрезка на части и от
б) способа выбора средней точки,
есть определенный интеграл от функции f(x) по отрезку [a, b].
Функция f(x) называется в этом случае интегрируемой на отрезке [a, b]. Величины a и b называются нижним и верхним пределами интегрирования соответственно.
50) Основные св-ва определённого интегрирала
1)Если промежуток интегрирования [a,b] разбит на конечное число частичных промежутков, то определенный интеграл, взятый по промежутке [a,b], равен сумме определенных интегралов, взятых по всем его частичным промежуткам.
2)теорема о среднем значении.
Пусть функция y = f(x) интегрируема на отрезке [a; b],m=min f(x) и M=max f(x) , тогда существует такое число

Что
Следствие.
Если функция y = f(x) непрерывна на отрезке [a; b], то найдется такое число , что .
 3)При перестановке пределов интегрирования определенный интеграл меняет свой знак на обратный.
3)При перестановке пределов интегрирования определенный интеграл меняет свой знак на обратный.
4)Определенный интеграл с одинаковыми пределами интегрирования равен нулю.

5)Интегрирование модуля функции
Если функция f(x) интегрируема,то и её модуль интегрируем на отрезке.
\
6)Интегрирование неравенства
Если f(x) и q(x) интегрируемы на отрезке [a;b] и х принадлежит [a;b]
 то
то
7)Линейность
Постоянный множитель можно выносить за знак определенного интеграла
если f(x) существует и интегрируема на отрезке [a;b] , A=const
№51
Если функция y=f(x) непрерывна на отрезке [a;b] и F(x) – какая-либо ее первообразная на [a;b] (F’(x)=f(x)), то имеет место формула

№52
Пусть для вычисления интеграла  от непрерывной функции сделана подстановка x=α(t).
от непрерывной функции сделана подстановка x=α(t).
Теорема:
Если:
1) Функция x=α(t) и ее производная x’=α’(t) непрерывны при t принадлежащей [c;v]
2) Множеством значений функции x=α(t) при t принадлежащей [c;v] является отрезок [a;b]
3) A α(c)=a и α(v)=b
То 
№55
Пусть функция f(x) непрерывна на промежутке [a;b] и имеет бесконечный разрыв при x=b. Если существует предел  , то его называют несобственным интегралом второго рода и обозначают .
, то его называют несобственным интегралом второго рода и обозначают .
Таким образом, по определению,
= .
Если предел в правой части существует, то несобственный интеграл сходится. Если же указанный предел не существует или бесконечен, то говорят, что интеграл расходится.
|
из
5.00
|
Обсуждение в статье: Вектор-функция скалярного аргумента. Производная |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы