 |
Главная |


Обработка данных съемки электронными тахеометрами
|
из
5.00
|
Электронные тахеометры
Электронный тахеометр – геодезический инструмент, позволяющий вести геодезические измерения в автоматическом режиме; обрабатывать результаты измерений и непосредственно решать ряд инженерно-геодезических задач с помощью встроенного программного обеспечения; сохранять результаты расчетов и измерений в собственной внутренней памяти; импортировать данные из внешних устройств и экспортировать данные во внешние устройства; осуществлять вывод информации на дисплей; корректировать данные и управлять процессом измерений и другими процедурами с помощью ручного ввода со специальной клавиатуры.
Используются тахеометры разных марок – Leica, Sokkia, Topcon, Trimble, и др. – различных модификаций и комплектаций, обладающих всеми вышеперечисленными минимальными для приборов подобного типа возможностями, которые могут быть и расширены. Например, электронный тахеометр-робот (Trimble 5600 и др.) осуществляет поиск, наведение на цель и измерения в автоматическом режиме по специальной программе с помощью сервоприводов и без непосредственного участия оператора.
Технические и пользовательские характеристики электронного тахеометра среднего класса (Topcon, серия GTS-233/235, рис.1):
| вес, кг габприты, мм точность измерения расстояний, мм дальность измерения расстояний, м время измерения расстояния, с точность измерения углов рабочий диапазон температуры окружающего воздуха, °С | 4.6 360х184х150 ±2/км 1.2 ±3” от -30 до +50 |
Тахеометр оснащен двумя панелями управления, каждая из которых оборудована клавиатурой и жидкокристаллическим дисплеем, что позволяет комфортно вести наблюдения при любом положении вертикального круга. Он обладает к тому же рядом полезных сервисных функций, таких как подсветка дисплея и визирных нитей, подогрев дисплея, звуковая сигнализация о некоторых аспектах измерительных процедур.
Программное обеспечение тахеометра Topcon позволяет быстро и качественно выполнять все виды инженерно-геодезических работ для проектирования капитальных ремонтов пути. Память тахеометра имеет емкость 4 МВ (8000 съемочных точек, до 60000 в тахеометрах более высокого класса). Данные измерений и вычислений хранятся в виде файлов нескольких типов. Имеется диспетчер памяти, позволяющий давать файлам названия и переименовывать их, искать и удалять файлы, искать и редактировать данные внутри самих файлов.
Подобное устройство внутренней памяти весьма удобно и характерно далеко не для всех типов тахеометров. Формат данных внутренней памяти совместим с большинством геодезических программ.
 |
Важным достоинством тахеометров Topcon является устойчивость процесса измерений даже во время близкого прохождения подвижного состава.
Обработка данных съемки электронными тахеометрами
При производстве проектных работ с использованием информационных технологий в состав исходных данных входит цифровая модель местности (ЦММ). Формально ЦММ представляет собой множество упорядоченных точек с известными координатами.
Точность определения координат точек для различных объектов в составе ЦММопределяется из условий ее необходимости и достаточности, то есть технической и экономической целесообразности. Например, для описания естественного рельефа местности в проектах новых железных дорог вполне технически достаточна и экономически целесообразна точность координирования, обеспечиваемая при использовании таких технологий как лазерное сканирование, фотограмметрия и т.п.
В проектах реконструкции железных дорог и ремонтов пути моделирование объектов, пространственное позиционирование которых связано с обеспечением безопасности движения поездов, техническая необходимость требует более высокой точности координирования точек, которую обеспечивает в настоящее время только наземная геодезическая съемка. Использование современных безлюдных технологий съемки, типа подвижных или стационарных спутниковых навигационных систем, видеопаспортизации и других, для выполнения этих работ экономически привлекательно, однако, необходимой точности позиционирования объектов в части контроля безопасности движения поездов (габариты, междупутья и т.п.) данные технологии пока не обеспечивают.
Для производства наземной геодезической съемки используются высокоточные электронные тахеометры, фиксирующие все данные измерений на встроенный магнитный носитель. Каждой точке съемки может быть присвоен код определяющий объект, которому она принадлежит. Обычно такую съемку называют координатной, хотя с точки зрения первичной информации получаемой прибором (и фиксируемой на носителе) – вертикальный и горизонтальный углы, наклонное расстояние – это традиционная тахеометрическая съемка. Собственно координаты точек определяются в результате последующей обработки данных измерений с уравниванием теодолитных ходов и т.п.
Координаты точек съемки, как первичная информация, могут быть определены при использовании электронных тахеометров оборудованных спутниковыми навигационным системами для автоматического координирования стоянок инструмента, которые выпускаются, например, фирмой Leica (Швейцария). Однако в связи с высокой стоимостью такие геодезические инструменты широкого распространения в нашей стране пока не получили.
Особенность производства геодезических работ на существующих железнодорож-ных путях в настоящее время состоит в том, что они не является выборочно-последовательными. Например, съемка плана линии с промерами габаритов и междупутий не выделяется в отдельную технологическую операцию. Положение железнодорожных путей, как и всех других сооружений и устройств, фиксируется с каждой стоянки инструмента в произвольной последовательности, исходя из соображений минимизации дистанций переноса отражателей (рис.1). То же относится и ко всем другим объектам имеющим протяженность (бровка земляного полотна, водоотводные канавы и т.п.). Последовательность точек, описывающих их положение в пространстве, в составе данных съемки не соответствует их действительной последовательности. Кроме того, эти точки распределены, в общем случае, произвольным образом среди точек, описывающих другие объекты, также линейные или точечные.
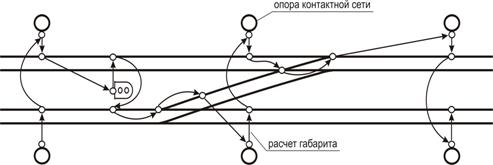
Рис. 1 Съемка станции
В этих условиях конечным результатом съемки, вне зависимости от типа первичной информации получаемой при полевых изысканиях (результаты тахеометрической съемки или координаты), является неупорядоченное множество точек с известными координатами. Для выделения из этого множества подмножеств точек, относящихся к тому или иному конкретному объекту, подлежащему учету при проектировании, используются коды точек. Код точки может быть задан непосредственно в процессе съемки или в камеральных условиях.
Стандартный код точки представляет собой набор из девяти символов (по умолчанию - +00000000). В проектных институтах Росжелдорпроекта используется эффективная система базовых кодов, созданная в процессе разработки проекта усиленного капитального ремонта участка Москва – Красное (Мосжелдорпроект, начало – 1997 г.). Данные коды в отличие от традиционных, обычно чисто цифровых кодов, содержат и буквы латинского алфавита, несущие семантическую нагрузку. Например, все точки, определяющие положение светофоров содержат букву S (светофор мачтовый – SM, карликовый – SK). Эти коды легко запоминаются, идентифицируются, доступны для ввода в полевых условиях.
В отечественной проектно-изыскательской практике съемка пути производится только по одной из рельсовых нитей. На кривых – это внутренняя, упорная нить. При последовательной съемке нескольких кривых разного направления выполняются переходы с одной рельсовой нити на другую. В рамках описываемой технологии фрагментом съемки называется участок пути проходимый по одной рельсовой нити.
Кодом точки, определяющей положение железнодорожного пути, является его номер. По аналогии с системой Credo (первоначально использованной для обаботки тахеометрии) в начальной точке каждого фрагмента съемки код расширяется символом B (begin), в конечной точке – символом E (end).
При этом все проектные расчеты ведутся применительно к оси пути и при обработ-ке данных съемки координаты точек, определяющие положение только одного из рельсов, должны быть преобразованы в координаты оси пути. В соответствии с этим коды точек перехода с одной рельсовой нити на другую должен быть дополнены информацией о сто-ронности расположения оси пути по отношению к съемочным точкам. По умолчанию, или при наличии в коде символа L (left), ось пути считается расположенной слева от съемоч-ной точки, при наличии символа R (right) – справа. Признак сторонности оси пути вводит-ся в начале каждого фрагмента съемки (в точках, имеющих в составе кода символ B).
Таким образом, обработка данных координатной съемки состоит, в первую очередь, в выделении из исходного множества точек съемки подмножеств точек, описывающих объекты, подлежащих учету при проектировании, для чего используются коды точек. Эта задача не является проблемной при современном уровне развития вычислительной техники вне зависимости от мощности исходного множества (обычно это несколько десятков тысяч точек).
Значительно более сложной задачей является распознание последовательности точек, описывающих линейные объекты.
 |
Данные координатной съемки (около тысячи точек на км в проектах капитального ремонта пути) могут быть обработаны только с использованием программных средств.
Рис. 2 Схема подучастков съемки
В настоящее время все автоматизированные расчеты (в том числе, плана) в проектах реконструкции железных дорог и ремонтов пути производятся единовременно на участках значительного протяжения. Длина расчетного участка составляет обычно 20-40 км. Съемка таких участков может производиться в течение нескольких дней, подучастками, которые перед расчетом должны быть объединены. При этом на каждом из подучастков съемка может вестись в разных направлениях, а подучастки могут накладываться один на другой, рис. 2.

Таким образом, при обработке данных съемки возникает необходимость не только выделить из массива съемочных точек подмассив (для этого используются коды точек), характеризующий конкретный объект проектирования (например, точки определяющие
 |
положение оси пути), но и распознать последовательность этих точек в пикетаже.
Признаком корректности последовательности точек является выполнение условия (рис. 3):
 , (1)
, (1)
 |
где
 , N– число точек.
, N– число точек.
Условие 1 является необходимым, но в общем случае, не достаточным для обоснования корректности последовательности точек. Однако применительно к реальным шагу съемки и радиусам кривых условие работает надежно.
Для распознания последовательности точек по ходу пикетажа может использоваться следующий алгоритм (A1), рис. 4:
· производится линейная аппроксимация точек съемки;
·
 |
последовательность точек восстанавливается вдоль аппроксимирующей прямой.
Практически, вычислительная схема алгоритма сводится к повороту (и переносу) осей координат так, чтобы ось абсцисс была параллельна продольной оси точек съемки (или совпадала с ней). Абсциссы точек определяют их последовательность. Однако, на сложных участках плана использование данного алгоритма может привести к ошибкам, рис. 5.
Решением данной проблемы может являться использование следующего алгоритма (A2):
· из заданной последовательности выбирают некоторую точку, считающуюся исходной;
· находят ближайшую к ней точку;
· находят точки, ближайшие к данной паре точек, справа и слева;
· затем находят точки, ближайшие к правой паре точек, справа и ближайшие к левой паре точек слева, и так до распознания последовательности всех точек.
Сторонность расположения некоторой точки по отношению к контрольной паре точек определяется условием (рис. 6):

если q > 0, точка считается расположенной справа от расчетной пары,
если q < 0, точка считается расположенной слева от расчетной пары,
если q = 0, точка должна быть исключена (дублирование точек).
Алгоритм существенно упрощается, если в качестве исходной точки брать именно первую (или последнюю) точку расчетного участка. В этом случае нет необходимости контролировать сторонность добавляемых точек, а результирующая последовательность формируется простым прибавлением ближайшей точки к концу уже сформированного массива.
Для нахождения начальной (конечной) точки расчетного участка можно использовать алгоритм A1. В программе желательно предусмотреть возможность принудительного задания исходной точки. В связи с тем, что результирующая последовательность может быть сформирована как по ходу увеличения пикетажа, так и по ходу его уменьшения, в программе желательно предусмотреть также возможность разворота точек.
В особо сложных случаях использование алгоритма A2 может привести к ошибочным результатам. Если план линии представляет собой спираль, в зоне самопересечения трассы распознанная последовательность точек может быть явно ошибочной, такой, например, как показано на рис. 7-а.

Для решения данной проблемы можно использовать то обстоятельство, что петли и спирали на трассе связаны с ее искусственным развитием на участках напряженного хода.
|
 (существует только одна такая точка). Единственной альтернативой использованию автоматических систем распознания последовательности точек, определяющих положение объекта, являются только ‒ или реализация технологии съемки, предусматривающая изначально строгую последовательность кодированных
(существует только одна такая точка). Единственной альтернативой использованию автоматических систем распознания последовательности точек, определяющих положение объекта, являются только ‒ или реализация технологии съемки, предусматривающая изначально строгую последовательность кодированных  |
точек, или выделение этой последовательности из «облака» точек в интерактивном режиме на экране монитора.
Рис. 7 Распознание последовательности точек в пространстве
После распознания последовательности точек, определяющих положение оси пути в пространстве, создается математическая модель плана существующей линии. В ее основе лежит моделирование очертания оси пути между точками съемки. Наличие такой модели позволяет решать конкретные проектные задачи.
 |
Первой из таких задач является аналитическое определение длины пути в пределах участка съемки. Для этого отрезки пути между точками съемки должны быть описаны некоторыми кривыми. Обычно, это фрагменты круговых кривых, радиус которых определяется по средней кривизне в сопряженных точках съемки. Для обеспечения гладкости модели по первой производной возможно использование и более сложных кривых – эллипсов, парабол.
На рис.8 показан фрагмент оси железнодорожного пути с нанесенными точками съемки. Точное расстояние между этими точками не может быть определено аналитическим путем. Речь может идти только о приближенном расчете на основе математического моделирования очертания оси пути между каждой парой точек съемки.
Для обоснованного выбора типа кривой, моделирующей очертание оси существующего пути между точками съемки, необходимо учитывать специфику современных данных съемки плана линии, характеризующихся существенной нерегулярностью, что отличает их от данных, полученных традиционными методами.
В соответствии с нормативными требованиями съемка плана должна производиться с регулярным шагом 100 м на прямых и 20 (10) м на кривых. Однако при современной технологии съемки, кроме точек расположенных с таким шагом, в состав данных включаются и точки характеризующие положение всех путевых устройств (стрелочные переводы, изолирующие стыки, границы рельсовых плетей и т.п.), а также все точки, расположенные в местах определения габаритов (опоры контактной сети, 
светофоры, платформы и т.п.). При этом расстояния между отдельными точками съемки могут измеряться десятками сантиметров. В этих условиях (малое расстояние между точками) на определение кривизны оси существующего пути большое влияние начинает оказывать точность определения координат точек. Даже малые смещения отражателя с оси пути (головки рельса) на соседних точках при пересчете на двадцатиметровую хорду вполне могут привести к грубой ошибке в оценке кривизны существующего пути, параметров кривой, моделирующей его геометрическое положение между точками съемки – к ошибкам при автоматическом расчете габаритов и междупутий.
При расчете расстояния между точками съемки только по плановым координатам оно соответствует длине горизонтального проложения соответствующего отрезка оси пути. При переходе в 3-D пространство можно определить расстояние между точками с учетом продольного уклона, то есть так, как оно измеряется мерной лентой при разбивке пикетажа или путеизмерительным вагоном.
При относительно малых величинах продольных уклонов, применяемых на железных дорогах, разность между наклонным расстоянием и его горизонтальным проложением на коротких участках невелика (рис.9), но всегда положительна и накапливается по мере увеличения длины участка. На расчетных участках длиной 20-40 км, обычных сейчас для проектирования в режиме единовременного автоматизированного расчета и расположенных на затяжных подъемах, эта разность в конце участка может составлять несколько метров.
Наличие пространственной математической модели оси существующего пути между точками съемки позволяет:
· автоматически: разбить аналитический пикетаж и привязать к нему положение любого объекта с известными координатами;
· определить расстояние от оси пути (по нормали к ней) до объектов с известными координатами типа опор контактной сети, светофоров, платформ и т.п. (габарит);
· определить в заданной в пикетаже точке существующего пути расстояние от его оси и по нормали к ней до соседнего пути (междупутье).
|
из
5.00
|
Обсуждение в статье: Обработка данных съемки электронными тахеометрами |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы