 |
Главная |


Управление рулем высоты
|
из
5.00
|
Две половины руля высоты механически соединены между собой с помощью трубы. Гидроприводы руля высоты питаются от гидросистем А и В. Подачей гидрожидкости к приводам управляют переключатели в кабине пилотов (Flight Control Switches).
Одной работающей гидросистемы достаточно для нормальной работы руля высоты.
В случае отказа обоих гидросистем (manual reversion) руль высоты отклоняется вручную от любого из штурвалов. Для уменьшения шарнирного момента руль высоты оснащен двумя аэродинамическими сервокомпенсаторами и шестью балансировочными панелями.

Наличие балансировочных панелей приводит к необходимости установки стабилизатора полностью на пикирование (0 units) перед обливом противообледенительной жидкостью. Такая установка предотвращает попадание слякоти и противообледенительной жидкости в воздушные полости балансировочных панелей, поскольку стабилизатор будет иметь положительный угол наклона 4° (передняя кромка выше задней).
26 декабря 2012 года произошёл инцидент с Боингом 737-800 Norwegian Air Shuttle
http://www.aibn.no/Luftfart/Rapporter/13-18?iid=14939&pid=SHT-Report-Attachments.Native-InnerFile-File&attach=1
Расследование показало, что при обливе стабилизатора противообледенительная жидкость может попадать в район гидроприводов и, в частности, на пружинные тяги управления гидроприводами руля высоты.

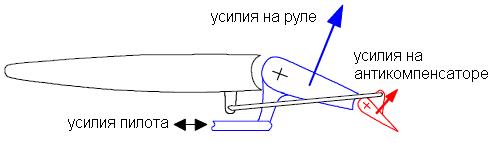
На рисунке показан в целом блок управления рулём высоты

И более подробно сам гидропривод с тягами управления.
При заходе на посадку обе тяги управления правого гидропривода оказались заблокированы замёрзшей жидкостью и не передавали управляющее воздействие от рулевой машины автопилота, а затем и усилия лётчиков на гидропривод. То есть управление рулём высоты было временно потеряно.
Проведённые исследования показали, что при обливе стабилизатора во взлётном положении вероятность попадания жидкости в район гидроприводов меньше, чем в положении (0 units).
Боинг внёс соответствующие изменения в документы по технической и лётной эксплуатации и готовит изменения в конструкцию самолёта.
Более подробно об этом инциденте и взаимной работе автопилота и системы управления рулём высоты, см.
http://aviacom.ucoz.ru/publ/boeing_737/bezopasnost_poljotov/neproizvolnyj_nabor_vysoty/10-1-0-67
На модификации “NG” аэродинамические сервокомпенсаторы при выпущенных закрылках и наличии давления в гидросистемах перестраиваются на антикомпенсаторы. Это сделано для увеличения эффективности руля высоты на взлёте при отказе двигателя (АММ 22-11-00 стр 84).
Принцип работы сервокомпенсатора и антикомпенсатора см. http://aviacom.ucoz.ru/Principleflight3.doc стр 5, 6



На левой половине руля высоты перестройка осуществляется по команде от FCC. Гидроцилиндр работает от гидросистемы А.
На правой половине – по сигналу датчика положения закрылков с задержкой на 10 секунд.
Гидроцилиндр работает от гидросистемы В.
На фото видно, что при руле высоты, отклонённом на пикирование, сервокомпенсатор на левой половине отклонён вверх (работает как сервокомпенсатор), а на правой половине – отклонён вниз (работает как антикомпенсатор). Это произошло потому, что была включена в работу только гидросистема В.
В AFM (Aircraft Flight Manual) 737-800 написано, что зафиксированы случаи вибрации сервокомпенсатора на приборной скорости более 275 узлов в диапазоне высот от 10000 до 25000 футов, при этом перед полётом производилась процедура удаления льда/противообледенения стабилизатора.
В связи с тем, что сервокомпенсатор может вызвать вибрацию проводки управления (См. Недостатки самолёта №6), то логично было бы выпустить закрылки, поскольку антикомпенсатор не способствует отклонению руля и, соответственно, не должен вызывать вибрацию. Хотя QRH в данном случае рекомендует только плавно уменьшить скорость до прекращения вибрации, не использовать интерцепторы в полёте и произвести посадку на ближайшем аэродроме.
Поскольку руль высоты не имеет аэродинамического триммера и в проводке управления нет механизма триммерного эффекта, то снять усилия с отклонённого штурвала невозможно. Чтобы усилия на штурвале исчезли, его нужно вернуть в нейтральное положение. При этом требуемого изменения в балансировке достигают путём перекладки стабилизатора. На всех установившихся режимах полёта независимо от высоты, скорости и тангажа штурвал всё время находится в приблизительно одном и том же нейтральном положении, которое может немного изменяться в зависимости от положения стабилизатора и работы системы MACH TRIM.
Нейтральное положение руля высоты относительно самолёта меняется в зависимости от положения стабилизатора. Руль высоты как бы «стремится» находиться в одной плоскости со стабилизатором. При работающем рулевом приводе руля высоты это обеспечивается за счёт смещения нейтрали загружателя штурвала, при включенном автопилоте – за счёт отслеживания положения стабилизатора датчиком автопилота и выдаче соответствующей команды на рулевой привод. При перекладке стабилизатора из положения 0 units в положение 17 units, штурвал смещается на 4,3 см на кабрирование, что соответствует перекладке руля высоты около 7°.
При положении стабилизатора 3 units, руль высоты опущен вниз на 4°.
При перекладке стабилизатора на кабрирование до 10 units, руль высоты займёт горизонтальное положение.
При угле стабилизатора 14 units, руль высоты поднимется вверх на 2,75°.
На самолетах модификации “NG” положение нейтрали руля высоты регулируется не только механически смещением нейтрали загружателя, но и электрическим сигналом от компьютера контролирующего управление самолётом FCC (flight control computer). Данный компьютер воздействует на проводку управления рулём высоты через электромеханизм системы MACH TRIM.

Функция смещения нейтрали от FCC работает только при отключенном автопилоте и выпущенных закрылках, когда пилот перекладывает стабилизатор нажатием переключателя на штурвале или меняет положение закрылков.
Положение стабилизатора то 7 до 10,5 units соответствует взлёту с передней центровкой. FCC при этом командует на смещение нейтрали руля высоты ~ 1,5° на пикирование. Стабилизатор в балансировочном положении (при нулевых усилиях на штурвале) при этом будет больше отклонён на кабрирование, что улучшает управляемость на взлёте (увеличивает запас руля высоты на кабрирование).
Поскольку гидравлические приводы руля высоты включены в проводку управления по необратимой схеме, то аэродинамическая нагрузка от рулей на штурвалы не передаётся. Усилия искусственно создаются с помощью загружателя штурвала (feel and centering unit) на который, воздействуют:
- механизм смещения нейтрали (точки нулевых усилий), механически связанный со стабилизатором;
- механизм системы Mach trim system;
- гидравлический имитатор аэродинамической нагрузки (elevator feel computer).

При отклонении штурвала поворачивается центрирующий кулачок, при этом подпружиненный ролик выходит из своей «ямки» на боковую поверхность кулачка. Стремясь под действием пружины вернуться обратно, он создает усилие в поводке управления, препятствующее отклонению штурвала. Кроме пружины на ролик воздействует исполнительный механизм имитатора аэродинамической нагрузки (elevator feel computer). Чем больше командное давление, тем сильнее ролик будет прижиматься к кулачку, что будет имитировать возрастание скоростного напора. Особенностью двухпоршневого цилиндра является то, что он воздействует на загружатель штурвала максимальным из двух командных давлений. Это легко понять по рисунку, поскольку между поршнями давления нет, и цилиндр будет находиться в нарисованном состоянии только при одинаковых командных давлениях. Если же одно из давлений станет больше, то цилиндр сместится в сторону большего давления, пока один из поршней не упрется в механическую преграду, исключив, таким образом, цилиндр с меньшим давлением из работы.

На вход elevator feel computer поступает скорость полета (от приемников воздушного давления, установленных на киле) и положение стабилизатора.
Под действием разности полного и статического давлений мембрана (q diaphragm) прогибается вниз, смещая золотник командного давления. Чем больше скорость, тем больше командное давление.
Изменение положения стабилизатора передается на кулачок стабилизатора, который через упругий рычаг ограничивает опускание мембраны и, соответственно, рост командного давления. Чем больше стабилизатор отклонен на кабрирование, тем меньше максимальное командное давление.
Предохранительный клапан предназначен для защиты от чрезмерного увеличения командного давления.
Таким образом гидравлическое давление из гидросистем А и В 3000 psi (210 атм.) преобразуется в соответствующее командное давление 200 – 2100 psi (от 14 до 150 атм.), воздействующее на загружатель штурвала. На NG диапазон командных давлений 180 -1400 psi.
Если, при убранных закрылках, разница в командных давлениях становится более 25%, то пилотам выдается сигнал FEEL DIFF PRESS. Эта ситуация возможна при отказе одной из гидросистем или одной из веток приемников воздушного давления. Никаких действий от экипажа не требуется, поскольку система продолжает нормально функционировать.
На самолётах модификации NG к каналу командного давления от гидросистемы А подключен модуль создания дополнительного давления EFSM (elevator feel shift module). Он выдаёт давление 850 psi когда включается в работу система предупреждения о приближении сваливания самолёта.
Система предупреждения о приближении сваливания самолёта
На штурвалах самолёта установлены механизмы тряски штурвала, которые обеспечивают тактильное и звуковое предупреждение пилотам о приближающемся сваливании.
Система состоит из двух независимых компьютеров с датчиками информации. Один компьютер выдаёт команду на включение механизма тряски штурвала командира, а второй – штурвала второго пилота.
Система включается, когда датчик AIR – GROUND на правой стойке покажет, что самолёт находится в воздухе, или скорость самолёта станет больше 160 узлов.
Система выключается, когда вышеупомянутый датчик покажет, что самолёт находится на земле, или же скорость самолёта уменьшится менее 60 узлов.
При расчёте момента включения механизма тряски используются четыре алгоритма:
- normal stall warning (сравнение α текущего и α включения механизма тряски)
- asymmetry stall warning (поправка на положение предкрылков)
- high thrust stall warning (поправка на тягу двигателей)
- speed floor stall warning (включение тряски независимо от угла атаки при падении скорости).
В первом алгоритме анализируется текущий угол отклонения закрылков (trailing edge flaps). Каждой позиции закрылков соответствует свой угол атаки включения тряски штурвала. Если текущий угол атаки превышает установленный предел, то выдаётся команда на включение тряски штурвала.
Второй и третий алгоритм включаются при выпущенных закрылках.
Второй алгоритм отслеживает загорание сигнализации LE FLAPS TRANSIT. Через 8 секунд после её появления (для исключения ложных срабатываний при выпуске-уборке предкрылков), выдаётся команда на первый алгоритм на понижение границы включения сигнализации. То есть компьютер считает, что сваливание начнётся на меньшем угле атаки и соответственно включит сигнализацию.
Третий алгоритм следит за режимом двигателей и скоростью полёта. Если N1>65%, N2>75%, то в зависимости текущих N1 и скорости полёта рассчитывается CTG (coefficient of thrust gradient) и, соответственно, выдаётся команда на первый алгоритм на понижение границы включения сигнализации. При этом команды от второго и третьего алгоритмов сравниваются и на выходе остаётся та, что больше по величине. Физический смысл третьего алгоритма – двигатели на повышенных режимах работы создают дестабилизирующий кабрирующий момент, способствующий попаданию самолёта в сваливание.
Четвёртый алгоритм анализирует только угол выпуска закрылков и текущую скорость полёта (таблица соответствия на рисунке). Когда скорость падает менее табличного значения, тряска штурвала включается независимо от угла атаки.
Информацию о текущем угле атаки система получает с датчиков угла атаки, расположенных справа и слева носовой части самолёта.

Также эти компьютеры рассчитывают и выдают на индикацию две скорости, обозначенные на линейке скоростей пилотажного индикатора. Большая из этих скоростей обозначается вершиной столбика янтарного цвета (цифра 8 на рисунке). Это минимальная скорость маневрирования (minimum maneuver speed). Она рассчитывается по текущему углу атаки и скорости самолёта. При полёте на данной скорости механизм тряски штурвала сработает при перегрузке 1.3 (см. уточняющий текст ниже). При изменении текущей нормальной перегрузки вершина янтарного столбика не перемещается по линейке скоростей.

Меньшая скорость обозначается вершиной красно-чёрного полосатого столбика и обозначает расчётную скорость начала срабатывания механизма тряски штурвала (цифра 9 на рисунке). В расчёте этой скорости участвует, в том числе, и текущая нормальная перегрузка (stick shaker speed), то есть при увеличении перегрузки красно-чёрный столбик ползёт вверх. Фактическое сваливание самолёта должно произойти на скорости меньшей, чем индицируемая скорость включения тряски штурвала.
Логика расчёта минимальной скорости маневрирования (вершина янтарного столбика) меняется в зависимости от положения закрылков.
При выпущенных закрылках (максимальная высота полёта 20000 футов) обеспечивается запас по перегрузке 0.3 до включения механизма тряски штурвала. Данный запас обеспечивает выполнение горизонтального разворота с креном 40° и обеспечивает «полные маневренные возможности самолёта» (full maneuver capability).
При убранных закрылках этот запас обеспечивается только на высотах ниже 10000 футов. В диапазоне высот 10000 - 20000 футов он уменьшается из-за влияния растущего числа М. Но не ниже 0.155, что соответствует горизонтальному развороту с креном 30° и обеспечивает «достаточные маневренные возможности самолёта» (adequate maneuver capability).
Выше 20000 футов вершина янтарного столбика показывает запас до начала аэродинамической тряски (low speed buffet), а не до начала тряски штурвала. Причем величину запаса можно установить предварительным программированием FMC в диапазоне 0.15 ÷ 0.65 для классики и 0.2 ÷ 0.6 для NG (по умолчанию Боинг устанавливает запас 0.3).
Чтобы узнать, какой запас установлен на конкретном самолёте нужно на земле открыть страницу INDEX зайти в MAINT открыть FMCS выбрать PERFORM FACTOR. Данный запас будет индицироваться в строке MANEUV FACTOR (он пишется с единицей, т.е. запас 0.3 обозначается 1.3)
На некоторых «классических» самолётах SMC (Stall Management Computer) дополнительно рассчитывает flaps up maneuvering speed (зелёный кружочек), minimum flap retraction speed (зелёная буква F), high speed buffet (дно верхнего янтарного столбика, цифра 15 на рисунке) и maximum operating speed (дно верхнего красно-чёрного столбика, цифра 14).

На самолетах модификации NG, кроме этого, рассчитывается рекомендуемая скорость для пилотирования при заходе на посадку и после взлёта (flap maneuvering speed, цифра 2 на рисунке). Данная скорость обозначается символом UP или цифрой, обозначающей угол выпуска закрылков. Эта скорость рассчитывается FMC по текущему весу самолёта и обеспечивает, как минимум, координированный разворот с креном 40 (то есть нормальную перегрузку 1.3) до срабатывания механизма тряски штурвала при полёте на небольшой высоте. При увеличении высоты данный запас может не обеспечиваться.

В нормальных условиях рекомендуемая скорость всегда будет больше минимальной скорости маневрирования, но при отказах механизации крыла может стать меньше.
Компьютер системы предупреждения о сваливании также рассчитывает угол тангажа, при достижении которого, будет достигнут угол атаки тряски штурвала (PLI pitch limit indicator). Данный символ индицируется на пилотажном приборе только при выпущенных закрылках.
Также данная система даёт команду в систему выпуска предкрылков на автоматический довыпуск выдвижных предкрылков при приближении к сваливанию (autoslat system). Команда выдаётся на угле атаки меньшем, чем угол атаки тряски штурвала. На классике данная система работает в диапазоне углов выпуска закрылков 1 – 5 градусов, а на NG – в диапазоне 1 – 25 градусов.
Кроме рассмотренных функций, на самолётах модификации NG предусмотрена активная помощь пилоту по выходу из сваливания. Когда компьютер системы предупреждения сваливания определяет, что самолёт находится на режиме сваливания (stall ID), то он выдаёт сигнал в систему управления самолётом (FCC), которая перекладывает стабилизатор на пикирование. Чтобы пилот не смог легко парировать данный пикирующий момент взятием штурвала на себя, включается модуль EFSM (Elevator Feel Shift Module), подающий дополнительное командное давление на загружатель штурвала. При этом градиент усилий на угол отклонения штурвала увеличивается почти в четыре раза. Условия срабатывания модуля EFSM: включился механизм тряски штурвала и после этого угол атаки увеличился ещё на 8 - 11°, а также нет запрещения для работы модуля из-за малой высоты полёта (100 футов).
Система улучшения устойчивости по скорости на больших числах М
(Mach Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS).
Система MACH TRIM обеспечивает устойчивость по скорости при числе М более 0,615. При увеличении числа М электромеханизм MACH TRIM ACTUATOR смещает нейтраль загружателя штурвала (feel and centering unit) и руль высоты автоматически отклоняется на кабрирование, компенсируя пикирующий момент от смещения аэродинамического фокуса вперед. При этом происходит смещение нейтрального положения штурвала. Подключение и отключение системы происходит автоматически в функции числа М.
Система получает число М от Air Data Computer. Система двухканальная. При отказе одного канала индицируется MACH TRIM FAIL при нажатии Master Caution и гаснет после Reset. При двойном отказе система не работает и сигнал не гасится. На классике необходимо выдерживать число М не более 0.74, на NG – IAS не более 280 узлов, число М не более 0.82.
|
из
5.00
|
Обсуждение в статье: Управление рулем высоты |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы