 |
Главная |


Электрические двигатели
|
из
5.00
|
В приводах строительных машин применяют электродвигатели переменного и постоянного тока (рис. 2.8). Асинхронные электродвигатели переменного тока, коротко-замкнутые (рис. 2.8, а) и с фазным ротором (рис. 2.8, б, в), называемые также двигателями с контактными кольцами, обычно питающиеся от электросети напряжением 220

 и 380 В с нормальной частотой 50 Гц, конструктив-
и 380 В с нормальной частотой 50 Гц, конструктив-
но просты, дешевы, надежны и удобны в эксплуатации. Их недостатком является высокая чувствительность к колебаниям напряжения в питающей сети. Типовая механическая характеристика 3 асинхронного электродвигателя показана на рис. 2.9, где через Тип, как и прежде, обозначены соответственно вращающий момент (Н-м) и частота вращения (об/мин) вала двигателя. Считается, что двигатель работает на естественной механической характеристике, если он включен в сеть с напряжением и частотой, соответствующими указанным в его паспорте, а также если в его электрическую Рис. 2.9. Естественная (3) и пусковые схему не включены дополнительные сопротивле-(реостатные) (1 и 2) характеристики шя в противном случае получаем искусственную
асинхронного электродвигателя механическую характеристику. Рабочим является
участок механической характеристики между точками с координатами (Т - 0; п = п0) и (Т= Тк; п = ик). Момент Т = Тн и частота вращения п = ин на этом участке являются но минальными, соответствующими наибольшему ресурсу двигателя. Перегрузочная способность асинхронных двигателей общего назначения, определяемая отношением максимального момента Тк к номинальному Тн на естественной характеристике - & = Тк/Тн, составляет 1,7 ... 2 (для котороткозамкнутых двигателей до 2,4), а для двигателей кранового типа - 2,3 ... 3. Частота вращения вала двигателя п на рабочем участке механической характеристики изменяется незначительно, в связи с чем естественную механическую характеристику асинхронного двигателя можно считать жесткой.
Момент Тп при п = 0 называют пусковым. Его отношение к номинальному моменту Тн для короткозамкнутых двигателей общего назначения составляет от 1 до 1,9. а для двигателей кранового типа - 2,3 ... 3. Для двигателей с фазным ротором это отношение составляет от 0,5 до 1,5, тогда как пусковой ток превышает номинальный в 5 ... 7 раз. Для уменьшения пускового тока этих двигателей в цепь обмотки ротора с помощью реостата включают дополнительные сопротивления. Каждому сопротивлению в цепи ротора соответствует своя искусственная механическая характеристика, называемая также реостатной.
Так, например, при включении в цепь ротора двух пусковых сопротивлений, которым соответствуют искусственные характеристики / и 2 (рис. 2.9), момент при пуске будет изменяется в пределах от Г, до Т2. После включения двигателя вначале он будет работать на характеристике 1. При этом момент будет уменьшаться от ТА (не обязательно совпадающего с Т2) до Г,, а частота вращения вала увеличиваться от нуля до пв. При достижении последнего сопротивление, соответствующее характеристике /, автоматически отключается, вследствие чего момент увеличивается до значения Т = Т2 с переходом на реостатную характеристику 2. Работая на этой характеристике, двигатель разгоняется до частоты пс с одновременным уменьшением момента до Т = Г,, а после отключения второго сопротивления переходит на естественную характеристику 3 в точке С с координатами (Т2; пс). Пуск заканчивается по достижении точки на естественной характеристике с моментом, равным моменту внешних сопротивлений TD. Маршрут пуска показан на рис. 2.9 стрелками. Обязательным условием пуска является Г, > TD, в противном случае уже на первом этапе (участок АВ) частота и = пв не будет достигнута, а следовательно первое сопротивление не будет отключено, и дальнейшая работа возможна только на искусственной характеристике /. При необходимости указанное условие обеспечивается снижением момента TD, в частности, путем отключения трансмиссии или исполнительного механизма от двигателя.
Искусственные характеристики, обладающие меньшими жесткостями по сравнению с естественной характеристикой, могут быть также использованы в качестве рабочих характеристик, когда необходимо плавно изменять скорости рабочих движений. Заметим, что короткозамкнутые двигатели запускаются и работают только на одной, естественной характеристике.
В приводах грузоподъемных машин для плавной посадки грузов, например, на монтаже конструкций, а также для ускоренного опускания грузозахватных устройств, применяют двухскоростные асинхронные двигатели с соотношением скоростей 2:1; 8:3; 3:1; 10:3.
Ручные машины с электрическим приводом подключают к электросети через преобразователи частоты с 50 на 400 Гц, что позволяет уменьшить их массу в 3,5 раза. Часто в приводах ручных машин используют однофазные коллекторные электродвигатели с высокой удельной мощностью на единицу массы и мягкой механической характеристикой. Коллекторные двигатели мало чувствительны к колебаниям напряжения в питающей сети, устойчиво работают в режиме частых пусков, могут включаться в сеть без преобразователей. К недостаткам относятся: высокая стоимость и необходимость в высокой квалификации обслуживающего персонала.
 Электродвигатели постоянного тока (см. рис. 2. ки которых представлены на рис. 2.10, а) обеспечивают большую плавность пус- т , ка и торможения механизмов по сравнению с двигателями переменного тока. На рис. 2.10, а представлены механические характеристики приводов, работающих по системе трехобмоточный генератор - двигатель и применяемых, в частности, на экскаваторах средней мощности. Форма характеристики может быть изменена соответствующим подбором ампер-витков трех обмоток генератора - независимой, шунтовой и сериесной. На рис. 2.10, б показана механическая характеристика привода постоянного тока по системе генератор - двигатель с электромашинными усилителями, применяемого на экскаваторах большой мощности. Такие характеристиками имеют участки малой и повышенной жесткости, что позволяет применять их как в приводах рабочих органов или исполнительных механизмов, требующих плавности изменения скоростей рабочих движений, так и при стабильной скорости, независимой от изменения внешней нагрузки.
Электродвигатели постоянного тока (см. рис. 2. ки которых представлены на рис. 2.10, а) обеспечивают большую плавность пус- т , ка и торможения механизмов по сравнению с двигателями переменного тока. На рис. 2.10, а представлены механические характеристики приводов, работающих по системе трехобмоточный генератор - двигатель и применяемых, в частности, на экскаваторах средней мощности. Форма характеристики может быть изменена соответствующим подбором ампер-витков трех обмоток генератора - независимой, шунтовой и сериесной. На рис. 2.10, б показана механическая характеристика привода постоянного тока по системе генератор - двигатель с электромашинными усилителями, применяемого на экскаваторах большой мощности. Такие характеристиками имеют участки малой и повышенной жесткости, что позволяет применять их как в приводах рабочих органов или исполнительных механизмов, требующих плавности изменения скоростей рабочих движений, так и при стабильной скорости, независимой от изменения внешней нагрузки.
Первый электропривод постоянного тока с питанием от аккумуляторной батареи был создан в России в 1834 г. академиком Б. С. Якоби, который в 1838 г. использовал его для привода гребного винта судна. Начало широкого промышленного применения электропривода связано с открытием явления вращающегося магнитного поля и созданием трехфазного асинхронного электродвигателя, сконструированного русским электротехником М. О. Доливо-Добровольским. В 1890 г. суммарная мощность электродвигателей по отношению к мощности применяемых в промышленности двигателей всех типов составляла 5%, в 1927 г. - 75%, а в 1976 г. - около 100%.
2.4. Механические передачи: общие сведения, параметры передачи
Механические трансмиссии, служащие для передачи движения от силовой установки нескольким потребителям энергии - рабочим органам и движителям ходовых устройств машин, состоят из передач - механизмов для передачи непрерывного вращательного или поступательного движения, в том числе для преобразования одной формы движения в другую (вращательного в поступательное и наоборот). При единственном потребителе передача превращается в трансмиссию.
Движение от силовой установки (двигателя) может передаваться рабочему органу передачей (трансмиссией) непосредственно, как, например, в некоторых моделях ручных электросверлильных машин, или через исполнительные механизмы, как, например, у одноковшового экскаватора - машины цикличного действия, исполнительными механизмами которого являются механизмы привода стрелы, рукояти, ковша, поворотной платформы и ходового устройства. Каждый исполнительный механизм обеспечивает простое движение рабочего органа. Складываясь в определенных сочетаниях на различных стадиях рабочего цикла (операциях), простые движения (кроме движения хода) образуют сложное движение рабочего органа - ковша.
 Передача характеризуется входными (на ведущем звене, приводимым двигателем или предшествующей передачей), выходными (на ведомом звене) и внутренними параметрами (рис. 2.11). Для двух первых это форма движения (вращательное или по-Рис. 2.11. Структурная схема движения (вращетельного или поступательное) его скорости (линейные v, и v2 - м/с или угловые ®\ и со2, с-1), в общем случае рассматриваемые как векторные величины, и силовые факторы (усилия F] и F2, H - при поступательном или крутящие моменты Т1 и Т2, Нм - при вращательном движении). Подстрочными индексами (,) и (2) обозначены соответственно входные и выходные параметры. Обобщенными характеристиками являются мощности соответственно Р, и Р2, Вт, определяемые как:
Передача характеризуется входными (на ведущем звене, приводимым двигателем или предшествующей передачей), выходными (на ведомом звене) и внутренними параметрами (рис. 2.11). Для двух первых это форма движения (вращательное или по-Рис. 2.11. Структурная схема движения (вращетельного или поступательное) его скорости (линейные v, и v2 - м/с или угловые ®\ и со2, с-1), в общем случае рассматриваемые как векторные величины, и силовые факторы (усилия F] и F2, H - при поступательном или крутящие моменты Т1 и Т2, Нм - при вращательном движении). Подстрочными индексами (,) и (2) обозначены соответственно входные и выходные параметры. Обобщенными характеристиками являются мощности соответственно Р, и Р2, Вт, определяемые как:

Внутренними параметрами служат: передаточное отношение /, определяемое как отношение (по модулю) скорости входного звена к скорости выходного звена, и коэффициент полезного действия (КПД) г|. Большинство механических передач преобразует вращательное движение на входе во вращательное же движение на выходе. Для них:

где  - частоты вращения соответственно на входе и на выходе.
- частоты вращения соответственно на входе и на выходе.
Реже применяют передачи с поступательной формой движения обоих звеньев, для которых:

Во всех случаях при одинаковых формах движения на входе и выходе безразмерное передаточное отношение показывает, во сколько раз уменьшается скорость (угловая или линейная) ведомого звена передачи по сравнению с теми же параметрами ее ведущего звена. Смешанные формы движения - поступательное на входе и вращательное на выходе и наоборот - характерные, например, для рычажных механизмов, рассматриваются в специальной литературе.
Коэффициент полезного действия есть отношение

которое всегда меньше единицы. Этот параметр показывает, какая часть затраченной энергии (Ft) используется полезно (Р2). Разница Р =P1 - P2 составляет потери энергии внутри передачи, природа которых будет раскрыта ниже при рассмотрении отдельных видов передач (трансмиссий).
Найдем теперь зависимость между входными и выходными силовыми факторами. При однородной форме движения, например, вращательном, после подстановки двух последних зависимостей из (2.1) в отношение (2.3) с использованием отношения (2.2) получим:


Проделав те же операции с параметрами поступательного движения, найдем:

Из этого следует, что при любых одинаковых формах движения ведущего и ведомого звеньев передачи выходной силовой фактор (крутящий момент или усилие на ведомом звене) равен произведению входного (на ведомом звене) силового фактора, передаточного отношения и КПД передачи.
В трансмиссии из п последовательно соединенных передач входное звено любой промежуточной передачи является выходным звеном предшествующей передачи, а ее выходное звено - входным для последующей передачи, так что общее передаточное число и КПД трансмиссии с однородной формой движения во всех передачах определятся произведениями соответствующих величин для составляющих трансмиссию передач:

Следует хорошо усвоить, что усилие или крутящий момент на ведомом звене трансмиссии зависят от внешнего сопротивления, а те же силовые характеристики ведущего звена, кроме того, от внутренних параметров трансмиссии (передаточного отношения и КПД). Для функционирования, например, трансмиссии для передачи вращательного движения необходимо, чтобы момент на ведущем звене, соответствующий внешнему сопротивлению, не превышал бы допустимого активного момента привода.
 Покажем это на примере передачи в приводе барабанной лебедки (рис. 2.12) со следующими параметрами: усилие натяжения ветви каната, навиваемого на барабан R = 38,5 кН; диаметр барабана по слою навивки каната D = 430 мм; максимальный момент, который может реализовать электродвигатель (на ведущем валу передачи) Tmsx = 3,2 кНм; передаточное отношение редуктора (механической передачи) / = 8,32; КПД редуктора (г|р) и барабана (потери энергии на трение в подшипниках барабанного вала, при взаимодействии каната в процессе его навивки на барабан с нарезными канавками - г|5) Лр = Лб = 0>97. Передача (редуктор /) на рис.2.12 оконтурена пунктирной линией.
Покажем это на примере передачи в приводе барабанной лебедки (рис. 2.12) со следующими параметрами: усилие натяжения ветви каната, навиваемого на барабан R = 38,5 кН; диаметр барабана по слою навивки каната D = 430 мм; максимальный момент, который может реализовать электродвигатель (на ведущем валу передачи) Tmsx = 3,2 кНм; передаточное отношение редуктора (механической передачи) / = 8,32; КПД редуктора (г|р) и барабана (потери энергии на трение в подшипниках барабанного вала, при взаимодействии каната в процессе его навивки на барабан с нарезными канавками - г|5) Лр = Лб = 0>97. Передача (редуктор /) на рис.2.12 оконтурена пунктирной линией.
Момент внешних сил на барабане от усилия в канате:

С учетом потерь на трение в барабане приведенный к ведомому валу 4 редуктора момент сил внешнего сопротивления составит:

Требуемый для преодоления этого момента момент активных сил на ведущем валу:

что меньше допускаемого электродвигателем максимального момента  . Следовательно, передача с представленными выше параметрами способна к функционированию.
. Следовательно, передача с представленными выше параметрами способна к функционированию.
Что касается скоростных параметров, то они обычно задаются приводным двигателем (на ведущем звене передачи). В ряде случаев скорость является функцией реализуемого двигателем крутящего момента соответственно его механической характеристике.
В приведенных выше зависимостях между силовыми факторами на входе и выходе передачи не учитывались инерционные составляющие, что допустимо в практических расчетах при малых значениях этих составляющих. В общем же случае, когда звенья передачи движутся с переменной скоростью, возникают инерционные силы, которые оказывают дополнительное сопротивление движению при его ускорении или способствуют ему при замедлении.
Покажем это на примере передачи вращательного движения, состоящей из ведущего 1 (рис. 2.13, а) и ведомого 2 звеньев. В случае движения системы с ускорением (  для звена
для звена  для звена 2,
для звена 2,  - передаточное отношение передачи), возникают дополнительные моменты
- передаточное отношение передачи), возникают дополнительные моменты  - моменты инерции звеньев соответственно / и 2. Момент инерции вращающегося звена определяется
- моменты инерции звеньев соответственно / и 2. Момент инерции вращающегося звена определяется
интегралом  взятым по всей его массе (объему). Через r здесь обозначен радиус от оси вращения до элементарной массы dm. При вычислении моментов инерции учитывают все детали, вращающиеся на общем со звеном передачи валу. Моменты T1ин и Т2нн вместе с моментом на выходном звене Т2 преодолеваются моментом на входе Т1, так что:
взятым по всей его массе (объему). Через r здесь обозначен радиус от оси вращения до элементарной массы dm. При вычислении моментов инерции учитывают все детали, вращающиеся на общем со звеном передачи валу. Моменты T1ин и Т2нн вместе с моментом на выходном звене Т2 преодолеваются моментом на входе Т1, так что:

Первое слагаемое в этой формуле называют моментом на ведомом звене, приведенным к ведущему звену Т2 пр, а второе слагаемое в скобках - моментом инерции ведомого звена, приведенным к ведущему звену J2 пр = I2/i2r\. Очевидно, что приведенный момент инерции ведущего звена остается без изменений: J\ пр = /|. С учетом этих обозначений прежняя формула преобразуется к виду:

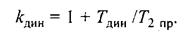
момент сил инерции или динамический момент Ттн, равный произведению ускорения на ведущем звене на суммарный приведенный момент инерции вращающихся звеньев передачи. Зависимость (2.5) является более общей по сравнению с полученной ранее (2.4), являющейся частным случаем общей зависимости при е, = 0. Очевидно, что при замедлении Е| < 0, а потому динамический момент в формуле (2.5) получает отрицательное значение, т. е. уменьшает движущий момент Т]. Обычно эту формулу заменяют ее упрощенным эквивалентом (2.4), если в результате игнорирования динамическим моментом погрешность в расчетах не превысит ее допустимого значения (обычно не более 5%).
Определение динамического момента передачи и его составляющих (ускорения г, и приведенных моментов /, пр и /2 пр) представляет собой сложную задачу, особенно в проектных расчетах, когда фактические параметры передачи еще не определены. Менее сложно, но все же громоздко, эта задача решается при проверочных расчетах передач с известными конструктивными параметрами. В расчетной практике часто пользуются приближенным представлением динамического момента через выработанный практикой коэффициент динамичности, равный отношению /гдин = 7уг2пр, с учетом которого формула (2.5) преобразуется к виду:

После приравнивания правых частей выражений (2.5) и (2.7) и несложных преобразований коэффициент динамичности определяется зависимостью:
Используя ту же методику, нетрудно доказать, что для трансмиссии, состоящей из и последовательно соединенных передач вращательного движения:

Tпр - момент на выходном звене трансмиссии, приведенный к ведущему звену; /. пр - момент инерцииу - го звена, приведенный к ведущему звену и определяемый как /;- пр = /;- /( г2,., п^); /; -фактический (до приведения) момент инерцииу - го звена; /^ и Л] - передаточное отношение и КПД участка передачи от ведущего (1) до у - го звена.
Аналогично выражению (2.7) в приближенных расчетах динамический момент учитывают коэффициентом динамичности:

Результаты вычислений по формулам с коэффициентом динамичности обычно используют в прочностных и других расчетах, принимая в качестве исходных наибольшие значения силовых факторов, в связи с чем коэффициент динамичности принимают обычно большим единицы, что соответствует ускоренному движению звеньев передачи.
Дальнейшее изложение трансмиссий строительных машин обусловлено особенностями их структуры и содержания, в связи с чем как самостоятельные составные части трансмиссий ниже будут рассмотрены только виды механических передач. Все другие виды трансмиссий (электрические, гидравлические, пневматические) целесообразно рассматривать совместно с системами управления в составе соответствующих приводов.
По конструктивному исполнению элементов механических передач, участвующих в преобразовании параметров движения, различают фрикционные, ременные, зубчатые, червячные, цепные и канатные передачи. В передачах первых двух видов движение от ведущего к ведомому звену передается за счет сил трения на контактных поверхностях сцепляющихся друг с другом ведущего и ведомого звеньев. Эти передачи относятся к передачам движения трением. В зубчатых, червячных и цепных передачах движение передается за счет силового воздействия зацепляющихся друг с другом элементов ведущего на элементы ведомого звена. Эти передачи составляют группу передач движения зацеплением. Наконец, канатные передачи образуют особую группу для передачи движения закрепленным на ведущем звене канатом. Эти передачи будут рассмотрены отдельно при изучении устройства и принципа работы полиспастов (см. п. 6.3). Из-за наличия в ременных, цепных и канатных передачах гибких связей - соответственно ремней, приводных цепей и канатов их называют передачами с гибкой связью.
Функциональные связи элементов механических передач обычно представляют кинематическими схемами. В случае конкретных моделей машин на кинематических схемах указывают скорости (линейные или угловые) движения составных элементов трансмиссии, а также формирующие их параметры, например, числа зубьев зубчатых колес. Во всех других случаях эти данные опускают. Допустимо в кинематических схемах не раскрывать содержания передач, обозначая их при этом прямоугольниками (см., напр., рис. 2.12), иногда с указанием передаточного отношения.
Фрикционные передачи.
 В фрикционных передачах ведущее и ведомое звенья - цилиндрические (рис. 2.13, а) или конические (рис. 2.13, б) катки - жестко посажены на вращающиеся в подшипниках валы и прижаты друг к другу. При вращении ведущего катка, приводимого двигателем или предшествующей передачей, ведомому катку сообщается вращение за счет возникающих на контактной поверхности сил трения. Из-за упругого проскальзывания линейная скорость ведомого катка v2 в зоне контакта отстает от линейной скорости ведущего катка v1:
В фрикционных передачах ведущее и ведомое звенья - цилиндрические (рис. 2.13, а) или конические (рис. 2.13, б) катки - жестко посажены на вращающиеся в подшипниках валы и прижаты друг к другу. При вращении ведущего катка, приводимого двигателем или предшествующей передачей, ведомому катку сообщается вращение за счет возникающих на контактной поверхности сил трения. Из-за упругого проскальзывания линейная скорость ведомого катка v2 в зоне контакта отстает от линейной скорости ведущего катка v1:
где  - коэффициент, учитывающий упругое проскальзывание; для передач, работающих без смазки
- коэффициент, учитывающий упругое проскальзывание; для передач, работающих без смазки  = 0,99 ... 0,995.
= 0,99 ... 0,995.
Как и ранее, подстрочными индексами (,) и (2) здесь и далее обозначены величины, относящиеся соответственно к ведущему (входному) и ведомому (выходному) звеньям передачи.
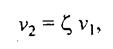
Используя известную зависимость между окружной v (м/с) и угловой со (с-1) скоростями, а также диаметром катка d (м) - v = da/2 и снабжая эти символы подстрочными индексами соответственно их принадлежности к звеньям передачи, из соотношения (2.8) получим:

Окружное усилие на ведущем катке F (Н) связано с крутящим моментом на его валу Т\ (Нм) зависимостью:

где n1 - КПД подшипников ведущего вала; d1 - диаметр ведущего катка (м), в случае конических катков измеренный по срединной окружности конуса.
Этим усилием создается крутящий момент на ведомом валу Т2 (Нм):

Сравнивая эту зависимость с зависимостью (2.4), получим:
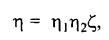
что согласуется с общим определением КПД, учитывающим внутренние потери энергии при передаче движения, включая упругое проскальзывание по контактным поверхностям. В среднем г, = 0,9 ... 0,95.
Функционирование фрикционной передачи определяется условием F < Fnpea [Fnpea - предельное значение силы трения на контактирующих поверхностях (Н)].
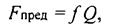
где  - коэффициент трения, зависящий от материала трущихся пар, их смазки и других факторов, ориентировочно при трении стали по стали или чугуну со смазкой и без нее соответственно
- коэффициент трения, зависящий от материала трущихся пар, их смазки и других факторов, ориентировочно при трении стали по стали или чугуну со смазкой и без нее соответственно  = 0,04 ... 0,05 и
= 0,04 ... 0,05 и  = 0,1 ... 0,15; стали или чугуна по текстолиту всухую
= 0,1 ... 0,15; стали или чугуна по текстолиту всухую  = 0,2 ... 0,3; Q - нормальное усилие на контактной поверхности, Н.
= 0,2 ... 0,3; Q - нормальное усилие на контактной поверхности, Н.
Невыполнение указанного выше условия приводит к проскальзыванию (буксованию) ведущего катка относительно ведомого без вращения последнего.
Передаточное отношение конической фрикционной передачи определяют по формуле:

которая получается из формулы (2.9) и геометрических соотношений (рис. 2.13, б). В случае перпендикулярных осей вращения ведущего и ведомого катков:

 В двух последних формулах через а, и а2 обозначены половины углов при вершинах конусов соответственно ведущего и ведомого катков.
В двух последних формулах через а, и а2 обозначены половины углов при вершинах конусов соответственно ведущего и ведомого катков.
Фрикционные передачи просты по форме рабочих поверхностей катков, но из-за необходимости создания больших контактных усилий нуждаются в специальных прижимных устройствах. По этой же причине их валы и подшипники испытывают повышенные нагрузки, а катки подвержены износу, особенно при буксовании. Лучшими показателями в этом отношении обладают фрикционные передачи с клинчатыми катками (рис. 2.14, а), у которых рабочие поверхности одного катка своими клиновыми выступами входят в такой же формы канавки другого катка. Нормальная сила давления Q' (Н) на Рис 2.14. Клинчатая фрикцион-одной стороне каждой канавки, вызванная силой прижаная передача одного катка к другому Q (Н), составит

а суммарная сила давления по всем z канавкам –

Здесь: z - число канавок, a - угол развала канавок.
Для получения большего значения Q' и, следовательно, Q'^, угол а должен быть по возможности малым. Во избежание заклинивания сопрягаемых катков его ограничивают значением a = 15°. Заменяя в формуле (2.11) Q на Q'T и обозначая

для предельной силы трения (Н) на рабочих поверхностях клинчатой фрикционной передачи получим:

формулу прежней структуры (2.11). Коэффициент пропорциональности/п в этой формуле называют приведенным коэффициентом трения. Он всегда больше фактического коэффициента трения/ Так, например, при a = 15° отношение/„p//составляет 7,66. Во столько же раз увеличивается суммарное нормальное давление Q'z по сравнению с силой прижатия катков Q и уменьшается нагрузка на валы и подшипники.
Фрикционные передачи применяют в приводах небольшой мощности, в частности, в конструкциях вариаторов - устройствах для бесступенчатого изменения скорости вращения ведомого катка, одна из конструктивных схем которого представлена на рис. 2.15. Вариатор представляет собой двухступенчатую фрикционную передачу, в которой промежуточный каток является одновременно ведомым для первой ступени и ведущим - для второй. В соответствии с формулой (2.9) его передаточное отношение определится как


где с/), d2 и dn - средние диаметры ведущего, ведомого и промежуточного фрикционных катков по поверхностям их взаимных контактов, м. Коэффициент ? имеет прежний смысл.
Диаметры й?, и d2 могут изменяться бесступенчато в зависимости от изменения угла наклона оси вариатора вращения промежуточного катка, при этом с увеличением первого диаметра уменьшается второй и наоборот. Изменением угла достигается требуемое передаточное отношение.
 2.6. Ременные передачи
2.6. Ременные передачи
Ременная передача (рис. 2.16, а) состоит из двух закрепленных на валах шкивов и охватывающего их ремня, надетого на шкивы с натяжением. Движение передается за счет сил трения в парах ведущий шкив - ремень и ремень - ведомый шкив.
В состоянии покоя обе ветви ремня натянуты с одинаковыми усилиями S0 (H). В состоянии передачи движения эти усилия перераспределяются: большим будет усилие Sx (H) в набегающей на ведущий шкив ветви, меньшим S2 (H) - в сбегающей с него ветви при сохранении равенства:

Эти усилия связаны между собой формулой Эйлера

где/- коэффициент трения между шкивом и ремнем; ф - угол обхвата меньшего шкива ремнем.
Последняя формула получена в предположении упругого скольжения ремня на всей длине дуги обхвата, обусловленного тем, что при перемещении ремня вместе с ободом шкива в пределах указанной дуги каждый элемент ремня переходит из зоны большего в зону меньшего натяжения, вследствие чего элементы ремня укорачиваются, и ремень несколько отстает от шкива. На ведомом шкиве, наоборот, шкив отстает от ремня. Упругим скольжением обусловлены потери энергии, учитываемые в расчетах силовых параметров КПД, который вместе с потерями в подшипниках, поддерживающих шкивы валов, составляет г| = 0,94 ... 0,96. Кроме того, из-за упругого скольжения происходит дополнительное снижение скорости вращения ведомого шкива, учитываемое коэффициентом С, = 0,97 ... 0,99.
Передаточное отношение ременной передачи определяют по формуле:

где D\ и ?>2 " диаметры ведущего и ведомого шкивов, м. Символы со и л и их подстрочные индексы имеют прежний смысл.
Заметим, что упругое скольжение, при котором шкивы и ремень взаимно проскальзывают на всей длине дуги обхвата, за исключением граничных точек - в начале менее нагруженной ветви на обоих шкивах, не следует смешивать с возникающим при перегрузках передачи буксованием - скольжением ремня по всей дуге обхвата, в т. ч. и в указанных точках.
Полезное окружное усилие (Н) определяется разностью усилий S, (Н) и S2 (H):

Это усилие (Н) связано с вращающими моментами на ведущем Т{ (Нм) и ведомом Т2 (Н-м) валах соотношениями:

из которых и с учетом передаточного отношения (2.13) вытекает прежняя зависимость (2.4) между вращающими моментами Т] и Т2, а также выражение (2.10) для полного КПД передачи.
В ременных передачах применяют следующие типы ремней: плоские (рис. 2.16, б), клиновые (рис. 2.16, в), круглого сечения (рис. 2.16, г), зубчатые (рис. 2.16, д) и поликлиновые (рис. 2.16, е). Наибольшее распространение в приводах строительных машин получили передачи с плоскими и клиновыми ремнями. Плоские ремни применяют в передачах с передаточным отношением не более i = 4, а клиновые ремни - до i = 6 ... 8 и скоростях ремня до 30 м/с. Узкие клиновые ремни допускают работу при скоростях до 40 ... 50 м/с. В одном комплекте может быть установлено до 8 клиновых ремней. Недостатком многоременных передач является неодинаковая вытяжка ремней в процессе эксплуатации, из-за чего они загружаются неравномерно. Этот фактор учитывают при расчете числа ремней в комплекте введением специального коэффициента снижения несущей способности ремней от 5% до 10% соответственно при 2 - 6 и более ремнях. Указанного недостатка лишены поликлиновые ремни с высокопрочным полиэфирным кордом, которыми заменяют несколько клиновых ремней, комплектно устанавливаемых на шкивах. Поликлиновые ремни имеют от 2 до 20 ребер. Передаточное отношение передач с поликлиновыми ремнями достигает 15 при скорости до 40 ... 50 м/с.
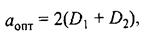
Оптимальным межосевым расстоянием (м) плоскоременной передачи считают:
для клиноременных передач этот размер назначают из диапазона

где h - высота ремня, м.
Круглоременные передачи применяют в слабо нагруженных приводах, в частности, в механизмах приборов. Зубчатые ремни отличаются от других ремней наличием на их внутренней поверхности зубьев, обеспечивающих постоянство передаточного отношения без проскальзывания, бесшумность работы, возможность работы в масле. В отличие от передач со всеми другими типами ремней, передающих движение за счет сил трения между ремнем и шкивами, зубчато-ременные передачи реализуют принцип передачи движения зацеплением. По этому признаку они более близки к цепным передачам (см. ниже). Зубчатые ремни применяют в передачах большой мощности (до 400 кВт) при скорости до 80 м/с.
 Обязательным условием функционирования ременной передачи является ее натяжение путем перемещения одного из шкивов, натяжным роликом (рис. 2.17) или пружиной, автоматическим устройством, регулирующим натяжение в зависимости от внешней нагрузки и т. п. По сравнению с плоскоременными клиноременные передачи требуют меньшего натяжения ремней благодаря тому, что за счет описанного выше при рассмотрении фрикционных передач с клинчатыми катками (см. рис. 2.14) расклинивающего эффекта они имеют более высокий приведенный коэффициент трения fnp, который определяется по формуле (2.12). При стандартном угле клина поперечного сечения ремня а = 40° отношение fnp/f составляет 2,92. Для обеспечения передачи движения с одинаковыми значениями полезного окружного усилия F при прочих равных параметрах клиноременные передачи требуют натяжения в 1,6 ... 2,2 раза меньше, чем плоскоременные передачи.
Обязательным условием функционирования ременной передачи является ее натяжение путем перемещения одного из шкивов, натяжным роликом (рис. 2.17) или пружиной, автоматическим устройством, регулирующим натяжение в зависимости от внешней нагрузки и т. п. По сравнению с плоскоременными клиноременные передачи требуют меньшего натяжения ремней благодаря тому, что за счет описанного выше при рассмотрении фрикционных передач с клинчатыми катками (см. рис. 2.14) расклинивающего эффекта они имеют более высокий приведенный коэффициент трения fnp, который определяется по формуле (2.12). При стандартном угле клина поперечного сечения ремня а = 40° отношение fnp/f составляет 2,92. Для обеспечения передачи движения с одинаковыми значениями полезного окружного усилия F при прочих равных параметрах клиноременные передачи требуют натяжения в 1,6 ... 2,2 раза меньше, чем плоскоременные передачи.
Достоинствами ременных передач являются: простота конструкции, возможность передачи движения на большие расстояния, способность предохранять механизмы от перегрузок за счет проскальзывания ремня по шкивам. К недостаткам относятся большие габариты, недостаточная долговечность ремней, частичная или полная неспособность работать при попадании на ремень и шкивы смазки (кроме передач с зубчатыми ремнями).
Зубчатые передачи.
Зубчатая передача состоит из двух посаженных на валы зубчатых колес, меньшее из которых называют шестерней, а большее - колесом. Для передачи вращательного движения между двумя параллельными осями применяют цилиндрические колеса с прямыми (рис. 2.18, а и ж), косыми (рис. 2.18, б) и шевронными (рис. 2.18, в) зубьями; между пересекающимися осями - конические колеса с прямыми (рис. 2.18, г) или круговыми (рис. 2.18, д) зубьями; между перекрещивающимися осями - винтовыми колесами (рис. 2.18, е). Для преобразования вращательного движения в поступательное и наоборот служит зубчато-реечная передача (рис. 2.18, з). Передача, в которой зубья колеса находятся на его внутренней поверхности (рис. 2.18, ж), называется передачей внутреннего зацепления.

Зубчатые передачи получили наибольшее распространение в приводах строительных машин благодаря малым габаритам по сравнению с другими механическими передачами, высокому КПД (л. = 0,97 ... 0,99), большой долговечности и надежности, постоянству передаточного отношения, обусловленному отсутствием проскальзывания между сопрягаемыми кинематическими парами, возможности применения в широком диапазоне моментов, скоростей и передаточных отношений. К недостаткам относится шум в работе на значительных скоростях и в случае недостаточно качественного исполнения. Наиболее этот недостаток проявляется в передачах с прямозубыми колесами. Передачи с косозубыми колесами (рис. 2.18, б) работают более плавно и менее шумно благодаря большему числу одновременно зацепляющихся пар зубьев. Обычно их применяют при окружных скоростях более 2 м/с. Недостатком является передача осевых нагрузок на валы, требующая установки их на подшипники, способные воспринимать эти нагрузки. Этого недостатка лишены передачи с шевронными колесами (рис. 2.18, в), представляющими собой два зеркально ориентированных косозубых колеса в одной детали. Осевые нагрузки каждой половины такого колеса взаимно уравновешиваются без их передачи на валы. Недостатком шевронных колес является более сложная технология их изготовления.
Зубчатые передачи преобразуют скорости и моменты подобно фрикционным передачам, но без упругого скольжения. Условные окружности зубчатой передачи с цилиндрическими колесами, которые бы имели рабочие поверхности цилиндрических катков эквивалентной в указанном выше смысле фрикционной передачи с равными передаточным отношением и межосевым расстоянием, называют начальными окружностями. Равным образом, условные конические поверхности зубчатой конической передачи, по которым обкатываются два конических зубчатых колеса без скольжения, называют начальными конусами. При диаметрах начальных окружностей шестерни и колеса doX и do2 (м) межосевое расстояние (м) цилиндрической зубчатой передачи определится как

 Для конической передачи таким обобщенным параме- dcl тром будет внешнее конусное расстояние (м), которое в слу-—tyfc, чае взаимно перпендикулярных ведущего и ведомого валов (рис. 2.19) определяют как
Для конической передачи таким обобщенным параме- dcl тром будет внешнее конусное расстояние (м), которое в слу-—tyfc, чае взаимно перпендикулярных ведущего и ведомого валов (рис. 2.19) определяют как

где de] и de2 - диаметры оснований начальных конусов соответственно шестерни
|
из
5.00
|
Обсуждение в статье: Электрические двигатели |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы