 |
Главная |


ГЛАВА 3. ХОДОВОЕ ОБОРУДОВАНИЕ
|
из
5.00
|
Назначение, структура, виды ходового оборудования, основные
Характеристики.
Ходовое оборудование предназначено для передачи нагрузок на опорное основание и для передвижения машин. Оно может быть активным и пассивным. Активным ходом оборудуют самоходные машины, а пассивным - машины, перемещаемые на буксире за тягачом, в качестве которого может быть использована любая самоходная машина. Ниже будут описаны активные ходовые устройства.
Ходовое оборудование включает взаимодействующий с опорным основанием движитель, подвеску и опорную раму или оси, а в самоходных машинах, кроме того, механизм передвижения. По типу движителя ходовое оборудование подразделяют на гусеничное, шинноколесное, рельсоколесное и специальное.
Гусеничное ходовое оборудование применяют для передвижения по бездорожью, а также в машинах, для которых передвижение не является основной операцией как, например, в одноковшовых экскаваторах, где оно используется, в основном, для передачи нагрузок, включая рабочие, на опорное основание и для передвижения экскаватора на новую рабочую позицию в пределах одной и той же рабочей площадки. Для передвижения таких машин на большие расстояния обычно используют тягачи со специальными прицепами-трайлерами.
Шинноколесное ходовое оборудование устанавливают на машинах, для которых транспортная операция занимает по времени соизмеримую с другими операциями часть технологического цикла, как, например, у самоходных скреперов, перемещающих грунт в своем ковше на расстояния нескольких километров. Такой же вид ходового оборудования имеют машины, часто меняющие рабочие площадки, отстоящие одна от другой на значительных расстояниях. Особенностью такого вида ходового оборудования являются повышенные транспортные скорости, соизмеримые со скоростями грузовых автомобилей.
Рельсоколесным ходом оборудуют машины, работающие в ограниченной зоне с идентичными транспортными траекториями, например, башенные краны, некоторые виды карьерных экскаваторов непрерывного действия и др. Всякое изменение размеров рабочей зоны этих машин связано с перекладкой путей и обосновано только в случае небольших затрат на эти работы.
К специальным ходовым устройствам относятся шагающие, вездеходные и др. Гусеничные движители (гусеницы) монтируют на раме, называемой также нижней рамой, в отличие от верхней рамы, входящей в остов машины. Шинноколесные движители (ходовые колеса) устанавливают обычно на мостах. Рельсоколесные движители в виде металлических колес закрепляют на осях нижней рамы, или  объединяют по несколько колес балансирами, шарнирно соединенными с нижней рамой посредством вертикально установленных шкворней.
объединяют по несколько колес балансирами, шарнирно соединенными с нижней рамой посредством вертикально установленных шкворней.
Нижние рамы (оси) соединяют с верхними рамами машины с помощью подвесок, которые бывают жесткими, полужесткими и мягкими. Соединение по жест-вески KOg схеме . на болтах и на пальцах, по мягкой схеме – с помощью пружин и рессор, в случае полужесткой схемы (рис. 3.1) одну часть нижней рамы соединяют с верхней рамой по жесткой, а вторую - по мягкой схеме. При движении мягкая подвеска способствует снижению динамических нагрузок от неровностей дороги. Для этих же целей в состав мягких подвесок вводят гидравлические, работающие по принципу гидравлического дросселя, или гидропневматические амортизаторы.
Основными технико-эксплуатационными показателями ходового оборудования являются: скорость передвижения, проходимость - способность передвигаться в различных эксплуатационных условиях, прежде всего, по рыхлым или переувлажненным грунтам и маневренность - способность изменять направление движения в стесненных условиях.
Проходимость машины при прочих равных условиях определяется глубиной колеи, образуемой в результате взаимодействия ходового оборудования с грунтом, дорожным просветом (клиренсом) - расстоянием от наиболее низкой части машины (кроме движителя) до опорной поверхности и сцепными качествами ходового оборудования. Глубина колеи h (м) увеличивается с ростом давления р (МПа) на контактной поверхности между опорной частью ходового оборудования и грунтом. Эти величины связаны между собой примерно пропорциональной зависимостью:

где с - коэффициент постели, значения которого колеблются в широких пределах - от 0,1 - 0,5 МПа/м для свеженасыпанного песка и мокрой размягченной глины до 20 - 100 МПа/м для мягких скальных грунтов, известняков, песчаников, мерзлоты.
Обычно удельные давления распределяются по контактной поверхности неравномерно. Различают среднее и максимальное удельное давление. Под средним удельным давлением понимают такое давление, которое имело бы место при равномерном распределении давлений по всей контактной поверхности. Его определяют как отношение нормальной к контактной поверхности нагрузки к площади этой поверхности. Максимальные удельные давления, хотя и действуют в отдельных точках контактной поверхности, определяют ту деформацию грунта, а следовательно, и глубину колеи, которая образуется в результате передвижения машины. Именно этот показатель определяет проходимость машины.
Более высокой проходимостью обладает гусеничное ходовое оборудование, имеющее развитую опорную поверхность движителя, обеспечивающую удовлетворяющие условиям эксплуатации удельные давления на грунт и меньшую, чем у шинноколесных машин его осадку. Гусеничные движители не теряют своей транспортной способности даже при погружении в грунт до половины своей высоты. В то же время они уступают шинноколесным по скорости передвижения, которая для большинства гусеничных машин не превышает 10 км/ч. Для рельсоколесных машин понятие проходимости теряет смысл, поскольку эти машины передвигаются по стальным рельсам, уложенным на подготовленное основание с соблюдением нормированных уклонов.
Маневренность характеризуется радиусом разворота R и шириной дорожного коридора Вак В зависимости от вида привода гусеничные машины могут разворачиваться относительно одной заторможенной гусеницы (рис. 3.2, а) (при групповом приводе) и относительно собственной оси (рис. 3.2, б) (при индивидуальном приводе включением гусениц на движение во взаимно противоположных направлениях). В первом случае радиус поворота, определяемый как радиус дуги А0В0 (рис. 3.2, а), описываемой центром опорного контура гусеничного движителя, постоянен, равен половине колеи В, а во втором случае (рис. 3.2, б) он равен нулю. При повороте на угол а относительно одной заторможенной гусеницы I (рис. 3.2, а) центр опорного контура перемещается по траектории 7 - А0В0 - 2. При этом траектория центра гусеницы I представляется ломаной линией 7,-0-2, без плавного перехода, а траектория центра забегающей гусеницы II - прямыми 72 и 22, сопряженными дугой окружности А2В2. При повороте относительно собственной оси (рис. 3.2, б) центр опорного контура движется по ломаной 1-2 без плавного перехода, центр забегающей гусеницы II - с плавным переходом по дуге А2В2, а центр отстающей гусеницы 7- по траектории /, -А\ВХ- 2, с возвратным движением на дуге Л ,7?|.
Для шинноколесных машин радиус поворота R определяется как радиус дуги окружности средней точки оси управляемых колес (рис. 3.2, в, д) или колес с управляемой
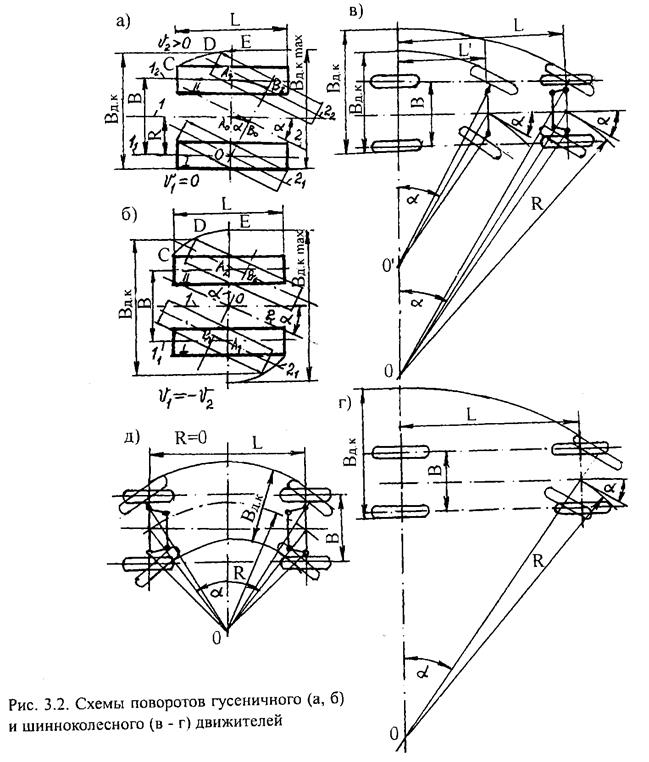
осью (рис. 3.2, г). Он зависит от угла поворота а: чем больше этот угол, тем меньше радиус R. С уменьшением базы машины L' (расстояния между осями задних и передних колес), уменьшается также радиус поворота. Поэтому для работы в стесненных условиях обычно применяют короткобазовые пневмоколесные движители. Меньшие радиусы поворота имеют также двухосные колесные движители со всеми управляемыми колесами (рис. 3.2, д). Гусеничные машины более маневренны по сравнению с шинноколесны-ми, выполненными по описанным выше схемам, в связи с тем, что они имеют меньшие радиусы поворота.
Ширина дорожного коридора есть ширина следа разворачивающейся машины. Этим параметром определяется вписываемость машины в ситуационную схему трассы передвижения. Ширина дорожного коридора как для гусеничных, так и для шинноко-лесных движителей зависит от угла поворота. Для гусеничного движителя ее максимальное значение 5д_клтах достигается при таком угле поворота а, когда наиболее удаленная от полюса вращения задняя точка С (см. рис. 3.2, а, б) забегающей гусеницы займет положение Е на поперечной оси исходного (предшествующего повороту) положения гусениц. При дальнейшем увеличении угла поворота значение Вд к тах остается неизменным. При повороте относительно собственной оси это значение больше, чем в случае поворота относительно одной заторможенной гусеницы. Для шинноколесных машин значение 5Д к тах соответствует наибольшему углу поворота. При равной колее наименьшую ширину дорожного коридора имеют двухосные шинноколесные движители со всеми управляемыми колесами (рис. 3.2, д).
|
из
5.00
|
Обсуждение в статье: ГЛАВА 3. ХОДОВОЕ ОБОРУДОВАНИЕ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы