 |
Главная |


Абстрактных автоматов
|
из
5.00
|
ТЕОРИЯ АВТОМАТОВ.
Абстрактные автоматы.
1.1Синхронные и асинхронные автоматы.
Описание автомата использует понятие последовательности. Последовательно- сти удобно рассматривать разворачива- ющимися во времени, изменяющeмся дискретно и принимающем значения
t = 0,1,2,3, ...
Отсчёты такого времени будем называть тактами. В каждом такте будем задавать (рассматривать) значения дискретных переменных X(t),Y(t) и S(t).
X(t) - переменная, значения которой представляются символами входного алфавита X = {X0, X1, ... XN-1} (вход-
ными символами); Y(t) - переменная
со значениями из символов выходного алфавита Y = {Y0, Y1, ... YM-1};
S(t) - переменная со значениями из символов алфавита состояний авто-
мата S = {S0, S1, ... SK-1}.
Автомат осуществляет преобразова-
ния символов, потактно воспринимая входные символы X и формируя вы-
ходные - Y, а также меняя свои сос-
тояния S.
При конечности всех алфавитов автомат называется конечным, хотя он может преобразовывать последовательности бесконечной длины.
Закон, определяющий смену состояний автомата, называется функцией перехо-дов. Это функция типа:
S(t+1) = F(X(t),S(t)); (1)
либо:
S(t+1) = F(X(t+1),S(t)); (1¢)
(1) подразумевает, что смена состояния под воздействием X(t) происходит мгно-венно в самом конце такта t либо между тактами t и (t+1).
(1¢) - что воспринимая X, автомат мгно- венно, в самом начале такта меняет сос- тояние.
И (1), и (1¢) подразумевают, что изме- нение состояния происходит только на границах тактов, причем однократно. В самом такте изменений не происходит.
Законы, определяющие выходную реак- цию Y автомата (функция выходов), так- же могут быть разными:
Y(t) = F(X(t),S(t)) (2)
Y(t) = F(S(t)) (2¢)
Y(t+1) = F(X(t),S(t)) (2¢¢)
Y(t+1) = F(X(t+1),S(t)) (2¢¢¢)
Наиболее часто рассматриваются авто- маты, задаваемые функциями:
(1),(2) ; (1),(2¢) ; (1),(2¢¢) ; и (1¢),(2)
так как физическое моделирование их наиболее естественно. Однако в теории автоматов рассматриваются и варианты:
(1),(2¢¢¢) ; (1¢),(2¢) ; (1¢),(2¢¢) ; и (1¢),(2¢¢¢).
Иногда автоматом называют систему вида (1) либо (1¢), то-есть систему, име- ющую алфавит состояний, но не имею- щую выходной алфавит. Поведение та- кого автомата состоит в последователь- ной смене состояний.
С точки зрения свойств преобразований, выполняемых автоматами различных ви- дов, все они оказываются в конечном счете эквивалентными: могут представ- лять только регулярные события (см.1.2.3)
В то же время различные виды могут в большей или меньшей мере подходить для решения различных задач анализа и синтеза автоматов.
Функции переходов и выходов могут за- даваться различными способами. Чаще всего используются табличные и графо- вые способы задания.
Примеры табличных заданий.
| |||
| |||

 |
16 N=3 K=3 M=2
Одна таблица может задавать сразу и F,
и F. Например, приведенные выше таб- лицы можно свести в одну.
 (*)
(*)
Если Y имеет вид Y=F(S), то обычно используется отмеченная таблица пе-реходов. Пример.

(**)
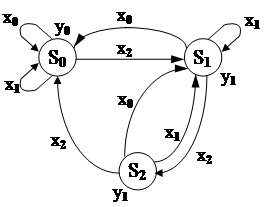
При графовом задании состояния S отождествляются с вершинами графа. Дуги, взвешенные (нагруженные) сим- волами Х, задают S=F(X,S).
 |
Y = F(X,S) задается взвешиванием дуги. 
 |
При Y = F(S) вместо расстановки Yj на всех дугах, выходящих из Sk , Yj взве- шивают вершину Sk .
Графы автоматов, приведенных выше, имеют вид:
 |
(*)
 (**)
(**)
Функции переходов и выходов могут иметь область определения , меньшую по сравнению со всеми возможными наборами значений их аргументов. При этом мы имеем недоопределенные (частичные) автоматы.
Зная функции переходов и выходов, можно описать поведение автомата, воспринимающего некоторую вход-
ную последовательность, если извест-
но состояние, в котором находился автомат в такт появления первого символа входной последовательности.
Примеры.
1. Пусть S(t+1) = F(X(t),S(t)) и Y(t) =
= F(X(t),S(t)) заданы, как (*). Полагая, что S(t) = S0 , рассмотрим поведение автомата на X0 X0 X1 X2 ...

2. Пусть S(t+1) = F(X(t),S(t)) и Y(t) =
= F(S(t)) заданы, как (**). Полагая, что S(t) = S0 , опишем поведение ав- томата на X1 X2 X2 X0 ...
 |
Говоря об автоматах, мы предполагаем возможность использования их для описания либо реализации преобра- зований дискретной информации.
При этом подразумевается наличие системы договоренностей (интер- претации), по которой можно уста-
новить соответствие реального вре-
мени тактам автомата.
При интерпретации нужно на полуоси времени выделить интервалы с номе- рами 0,1,2, ... , задающие такты авто- мата:
 |
Длительности тактов (и пауз между
ними) могут быть любыми, вплоть
до одного момента времени. Способы разметки времени также могут быть разными; мы выделим 2 из них, опре- деляющие различные классы автоматов.
С этой целью будем рассматривать
автомат как объект, который обмени- вается входными и выходными сиг-
налами (представляющими символы входного и выходного алфавита) с вне- шней средой.
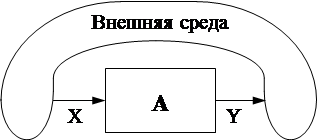 |
Такты можно выделить с помощью некоторых «часов» (датчика тактов), общих как для автомата, так и для «внешней среды», например, в виде генератора синхроимпульсов, сигнали- зирующего о наличии такта.
Автоматы, работающие в такой системе тактности, называются синхронными.
Таким образом, в синхронном автомате
X и Y должны формироваться в опре- деленное время, выделяемое датчиком тактов.
Физическая модель может интерпрети- роваться как синхронный автомат, на- пример, следующим образом.
Имеем генератор СИ , который выде- ляет на полуоси времени интервалы Т.
 |
Пусть во время этих интервалов вход- ные воздействия Х и выходные реакции
Y физической модели, а также внутрен- ние сигналы, представляющие состояния
S, не изменяются (смена X,Y и S проис- ходит только между интервалами Т).
В этом случае интервалы Т соответ-
ствуют тактам. Если поведение физи- ческой модели при этом можно описать функциями переходов и выходов, то физическая модель может рассматри- ваться как автомат.
Зафиксируем временную диаграмму функционирования рассматриваемой физической модели:

 Для синхронных автоматов наиболее естественны и наиболее употребимы задания вида:
Для синхронных автоматов наиболее естественны и наиболее употребимы задания вида:
I обычно называют автоматом Мили,
II - автоматом Мура;
III будем называть автоматом Мили с
задержкой.
Можно искать интерпретацию, при ко- торой некоторое физическое устройство может рассматриваться (описываться) как автомат. Это задача анализа.
Можно строить физическую модель, которую при определенной интерпре- тации можно считать автоматом с тре- буемым законом функционирования. Это задача синтеза.
Выделять такты с помощью генератора синхроимпульсов (СИ) можно по раз- ному (для разных физических моделей могут быть удобными разные интер- претации):

В асинхронных автоматах начало (и ко- нец) тактов определяется по факту из- менения Х на входе автомата.
 Паузы между тактами представлены
Паузы между тактами представлены
моментами смен Х.
Таким образом, для асинхронных авто- матов такт формируется внешней сре- дой (X и Y в асинхронном автомате мо- гут формироваться в произвольное вре- мя).
Изменение X(t) для асинхронного авто- мата означает начало следующего такта (t+1). Новое значение X(t+1) рассмат- ривается как причина изменения состо- яния S(t) и появления нового S(t+1).
S(t+1) появляется как реакция на X(t+1) сразу же: S(t+1) = F( X(t+1), S(t)).
Функции переходов такого вида пред- ставляют наибольший интерес из-за трудностей физического моделирова- ния асинхронных автоматов с S(t+1) =
= F( X(t), S(t)).
Функции выходов обычно имеют вид:
Y(t) = F( X(t), S(t)) , либо
Y(t) = F(S(t)).
В итоге мы имеем:
 |
В заключение отметим, что и в син-
хронных, и в асинхронных автоматах
чаще всего мы имеем дело с иници- альными автоматами, то есть с такими, для которых заданы начальные состо- яния S(0).
Задачи теории
абстрактных автоматов.
Эквивалентность
Автоматов.
Наибольший интерес для нас предста- вляют абстрактные синхронные авто- маты Мили и Мура, которые мы и бу- дем рассматривать.
Пусть мы имеем автомат Мили
 |
t = 0,1,2, ...
S(0) = S0 .
Входная последовательность X(0) X(1) X(2)... будет отображаться таким авто- матом в выходную Y(0) Y(1) Y(2)...
Получаемое соответствие называется отображением, индуцируемым рассма- триваемым автоматом Мили.
Если устанавливать связь выходной ре- акции автомата Мура с выходной пос- ледовательностью, то можно установить
ее так:
Y(t) = F(S(t)) заменим на Y(t+1) =
= F(S(t+1)) = F(F(X(t),S(t))) =
= Y(X(t),S(t)).
Отсюда видно, что автомат Мура мож- но рассматривать как автомат Мили со сдвинутой на такт выходной реакцией.
Отображение, индуцируемое автоматом Мура , устанавливает соответствие X(0) X(1) X(2)... и Y(1) Y(2) Y(3)... , так как Y(0) - значение, не зависящее от вход- ной последовательности автомата Мура.
Автоматы Мура можно считать част-
ным случаем автоматов Мили, если нас интересует не истинное время появле- ния выходных символов Y, а лишь по- рядок их следования во времени (отоб- ражение Х в Y).
В абстрактной теории автоматов, испо- льзующей лишь свойства индуцируемых отображений, автоматы Мура так и трактуются. При изучении же способов построения композиций автоматов (в структурной теории) автоматы Мура рассматриваются как отдельный класс.
Автоматы (в том числе и разных видов) называются эквивалентными , если ин- дуцируемые ими отображения одина- ковы.
Можно доказать, что:
для любого автомата Мура можно
построить эквивалентный автомат
Мили (и наоборот).
Частным случаем эквивалентности ав- томатов одного вида является их равен-ство.
Автомат А вкладывается в автомат В, если функции переходов и выходов А в области их определения равны функци- ям переходов и выходов автомата B.
При этом А называется подавтоматом В,
а В - надавтоматом А (обозначается А Í
Í В). Если А Í В и В Í А, то автоматы равны : А = В.
|
|


|
Обобщая равенство функций переходов
и выходов до равенства с точностью до переименования символов, можно гово- рить не о вложении, а об изоморфном вложении автоматов и соответственно
не о равных, а об изоморфных автома- тах.
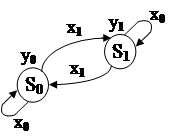
 Пример
Пример
Автомат С изоморфен автомату А из предыдущего примера. С изоморфно вкладывается в В.
|
из
5.00
|
Обсуждение в статье: Абстрактных автоматов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы