 |
Главная |


Строим кинематическую схему с обозначением на ней всех колёс, вращающих моментов и частот вращения ступеней
|
из
5.00
|
Выбор схемы и предварительные расчеты
Имеем механизм с вращательным движением выходного звена прибора
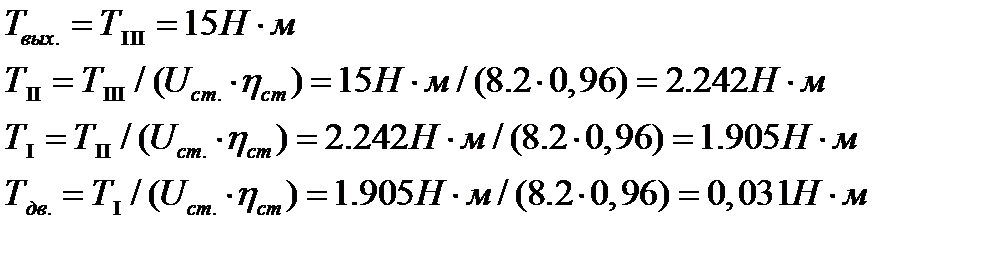
Момент на выходе редуктора 15 Нм
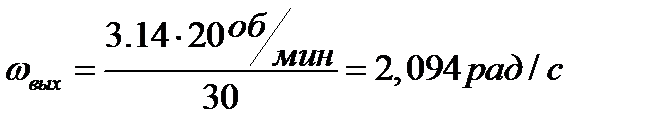
Частота вращения на выходе редуктора 20 об /мин
1.1 Потребная мощность электродвигателя определяется на основании заданных на выходе редуктора величин крутящего момента и угловой скорости. 
 [Вт] , где
[Вт] , где 
Tвых–момент на выходе редуктора
ωвых-угловая скорость на выходе редуктора
nвых- частота вращения на выходе редуктора
КПД механизма на данном этапе расчета выбираем из диапазона (0.7..0.8).


1.2 По известной потребной мощности двигателя осуществляем его подбор:
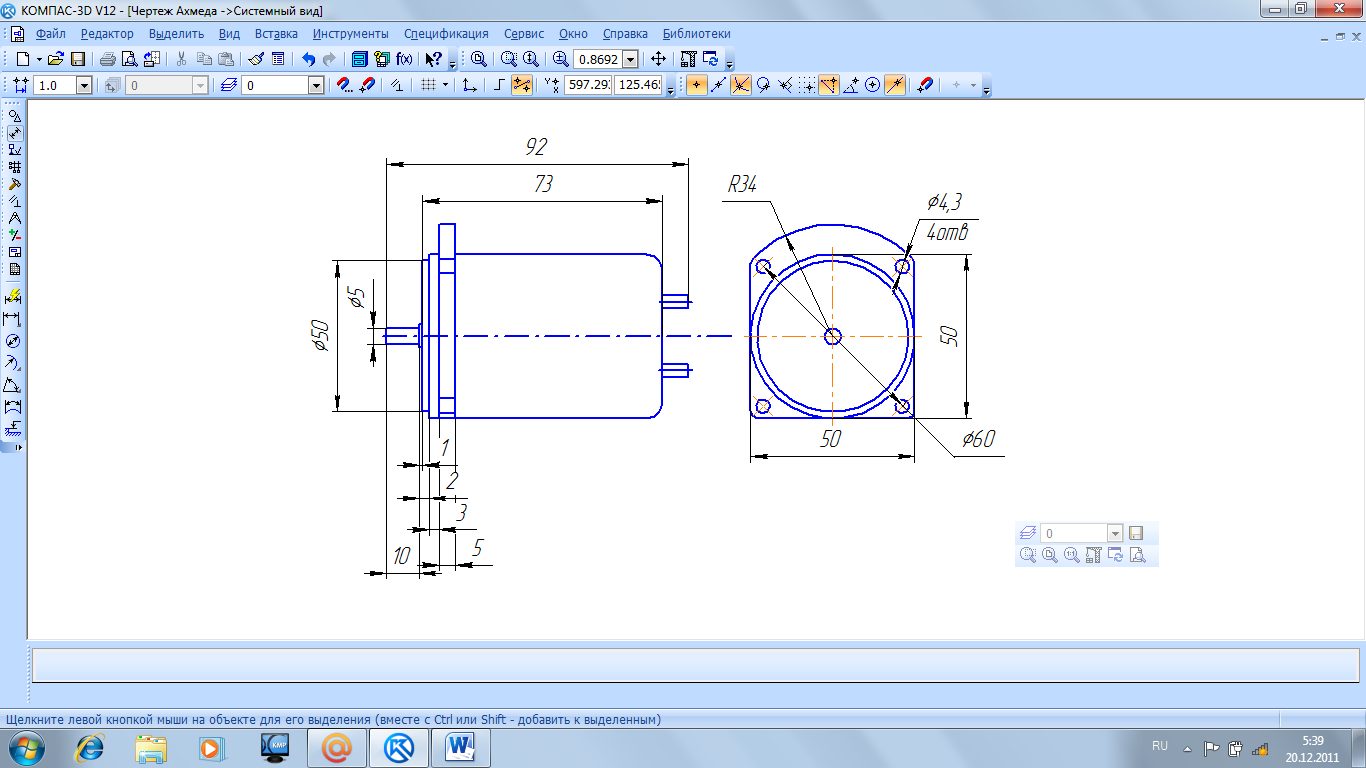
Тип двигателя: ДАТ-60-12
Основные технические характеристики:
Номинальная мощность: 60 Вт;
Частота вращения: 1100 об/мин;
Масса: 650 г.
Эскиз двигателя:
Определим общее передаточное число редуктора
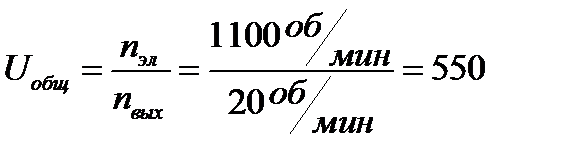 ,
,
Где nэл – частота вращения вала двигателя.
Выберем трёхступенчатый планетарный редуктор, каждая ступень которого ступень Джемса.

где N-число ступеней. Назначаю N=3.

 - среднее передаточное число ступеней.
- среднее передаточное число ступеней.
Для планетарных редукторов передаточные числа ступеней рекомендуется брать одинаковыми. Принимаю:
 =U1=U2=U3=8,2
=U1=U2=U3=8,2
Проверяем точность обеспечения Uобщ.(2-3%):

1.4 Определим число зубьев зубчатых колёс:
Число зубьев центрального колеса планетарной передачи берём из диапазона Z1=18..22, Z3≥80, Z2>25.
Z1=20 ;
Число зубьев неподвижного колеса определяется по формуле Виллиса:
Z3=(Uст.-1)·Z1=(8.2-1)·20=144
Число зубьев сателлитов определяем из условия соосности:
Z1+Z2=Z3-Z2 ;
Z2=(Z3-Z1)/2=(144-20)/2=62
1.5 Определяем количество сателлитов:
2 условия:
1 )Условие соседства, из которого определяем максимально возможное количество сателлитов (Kmax):

 =1 - коэффициент высоты головки зуба зубчатого колеса с эвольвентным профилем зубьев.
=1 - коэффициент высоты головки зуба зубчатого колеса с эвольвентным профилем зубьев.
 рад.
рад.
2 ) Условие даёт возможность определить максимальное количество сателлитов:
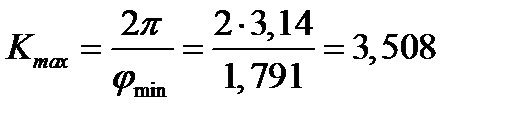
Тогда K=1, 2, 3
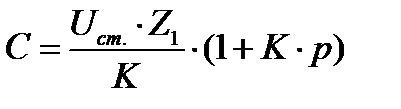
Гдеp – количество полных оборотов водила.
Возьмём p=0, тогда

С – целое число.
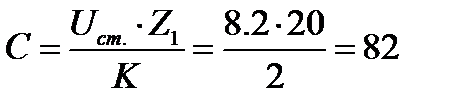 - целое
- целое
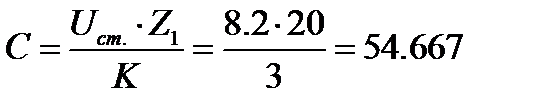 - не целое
- не целое
Выбираем количество сателлитов K=2, так как чем больше сателлитов, тем меньше нагрузка на колёса.
Определяем вращающие моменты на промежуточных валах редуктора.

Гдеηст.- КПД ступени берётся в диапазоне (0,96…0,98)
1.7 Определяем частоту вращения валов редуктора:
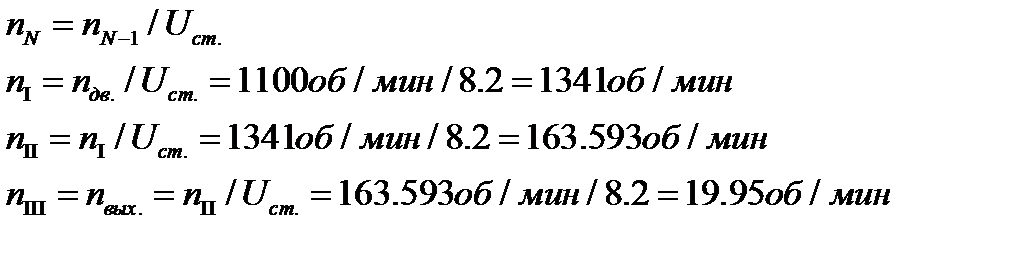
| № ступени | Двигатель | I | II | III |
| n, об/мин | 163.593 | |||
| Т,Н·м | 0.031 | 1.905 | 2.242 |
строим кинематическую схему с обозначением на ней всех колёс, вращающих моментов и частот вращения ступеней.

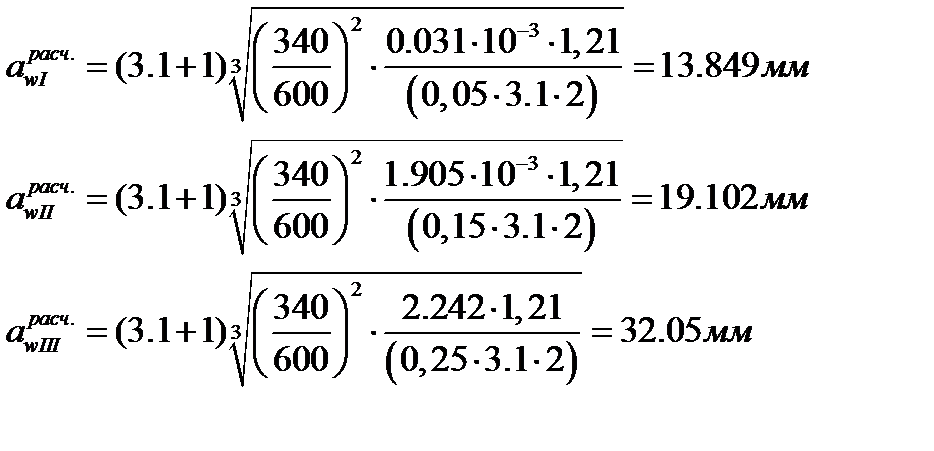
1.10 Вычисляем межосевое расстояния aw из расчёта на контактную прочность закреплённой зубчатой передачи.
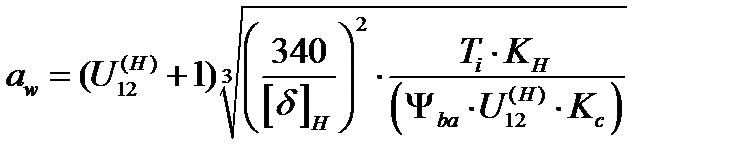
 - передаточное число первого колеса ко второму при неподвижном водиле
- передаточное число первого колеса ко второму при неподвижном водиле

 - допустимое контактное напряжение. В нашем случае для стали равно 600 МПа
- допустимое контактное напряжение. В нашем случае для стали равно 600 МПа
1МПа=600 Н/мм2
Тi– момент на входе ступени (Н·мм);
KH – коэффициент нагрузки

KHB – учитывает неравномерность распределения нагрузки по ширине венца зубчатого колеса, берётся из диапазона (1,1…1,4);
KHC – учитывает неравномерность распределения нагрузки между сателлитами, берётся из диапазона (1,1…1,4);
Принимаю:
KHB=1,1
KHC=1,1
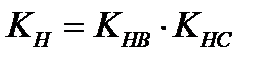 =1,1·1,1=1,21
=1,1·1,1=1,21
 - коэффициент относительной ширины передачи, берём в диапазоне (0,05…0,25).
- коэффициент относительной ширины передачи, берём в диапазоне (0,05…0,25).
0,05 – для быстроходных передач;
0,25 – для тихоходных передач.

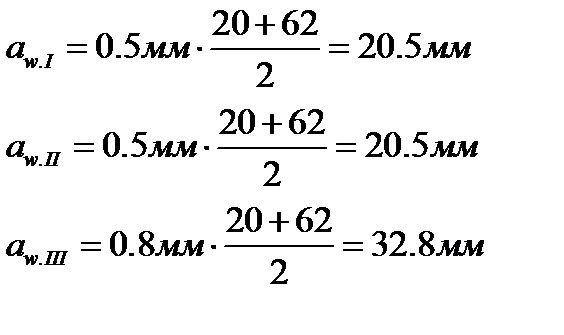
По величине awопределяем модуль зацепления колёс:
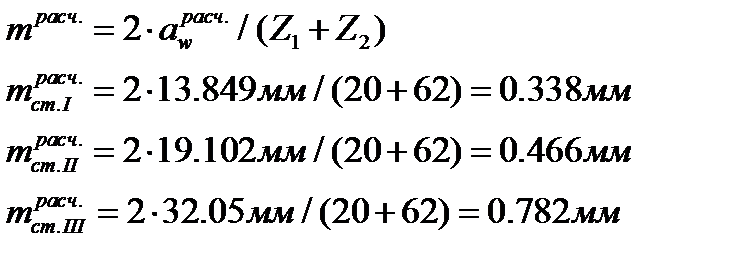
Величину m округляем до следующего стандартного значения по ГОСТ 9563-60 и вычисляем уточнённое межосевое расстояние:

|
из
5.00
|
Обсуждение в статье: Строим кинематическую схему с обозначением на ней всех колёс, вращающих моментов и частот вращения ступеней |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы