 |
Главная |


Проверка выполнения частных условий срабатывания и несрабатывания исполнительных элементов спроектированной системы
|
из
5.00
|
Проектирование на контактных элементах системы логического управления технологическим процессом.
Система логического управления содержит четыре приёмных элемента А, В, С,D и два исполнительных элемента X,Y.
Алгоритм работы системы следующий:
Для элемента X (в нашем примере маломощный электродвигатель постоянного тока):
1. Элемент X срабатывает, если срабатывают А,B,C,D.
2. Элемент X срабатывает, если срабатывают А,C,но не срабатывает B,D.
3. Элемент X срабатывает, если срабатывает C,D, но не срабатывают A,B.
4. Элемент Х срабатывает если срабатываетB, но не срабатывает A,C,D.
Для элемента Y (в нашем примере сигнальная лампа):
1.Y срабатывает, если срабатывает В, С, но не срабатывают А,D;
2.Y срабатывает, если срабатывает C,D,но не срабатывают A,B;
3.Yсрабатывает, если срабатывает A, но не срабатывает B,C,D;
4. Yсрабатывает, если срабатывает C, но не срабатывает A,B,D.
Решение. Составляем основной элемент синтеза - таблицу состояния.
В таблице состояния рассматриваем все возможные комбинации состояний приемных элементов. Так как приемных элементов четыре, то возможное число комбинаций состояния равно шестнадцати, т.е. имеем шестнадцать строк в таблице состояний. Состояние исполнительных элементов записываем в соответствии с алгоритмом: если элемент срабатывает - ставится 1, в противном случае - 0.
Таблица 1.
| A | B | C | D | X | Y | |
| 1. | ||||||
| 2. | ||||||
| 3. | ||||||
| 4. | ||||||
| 5. | ||||||
| 6. | ||||||
| 7. | ||||||
| 8. | ||||||
| 9. | ||||||
| 10. | ||||||
| 11. | ||||||
| 12. | ||||||
| 13. | ||||||
| 14. | ||||||
| 15. | ||||||
| 16. |
Перейдем к составлению логической функции. Для этого составим частные условия срабатывания для элемента X:
X1= 
X2= 
X3= 
X4= 
Общие условия срабатывания запишем как дизъюнкцию частных условий срабатывания. Это означает, что элемент X сработает, если будет выполнено или одно частное условие срабатывания, или все частные условия, или их комбинация.
X0=X1+X2+X3+X4
X0=abcd +ab̅cd̅+ a̅b̅cd +a̅bc̅d̅=cd(ab+a̅b̅)+d̅(ab̅c+a̅bc̅)
Аналогично составляем логическую функцию для элемента Y.
Y1= a̅·b·c·d̅
Y2= a̅·b̅·c·d
Y3= a·b̅·c̅·d̅
Y4= a̅·b̅·c·d̅
Y0=Y1+Y2+Y3+Y4
Y0=a̅bcd̅ +a̅b̅cd + ab̅c̅d̅ + a̅b̅cd̅=+ ab̅c̅d̅+a̅c·(bd̅ +b̅d+b̅d̅) =
=ab̅c̅d̅+a̅c(bd̅+b̅(d+d̅))
Проверка выполнения частных условий срабатывания и несрабатывания исполнительных элементов спроектированной системы.
Проверим условия срабатывания несрабатывания Х.
Для первой строки таблицы состояний: A=0, B=0, C=0, D=0
Х1=0
Для второй строки: A=0, B=0, C=0, D=1
Х2= 
Для третьей строки :A=0, B=0 C=1, D=0
Х3= 
Для четвертой строки: A=0, B=0, C=1, D=1
Х4= 
Для пятой строки: A=0, B=1, C=0, D=0
Х5= 
Для шестой строки: A=0, B=1, C=0, D=1
Х6= 
Для седьмой строки: A=0, B=1, C=1, D=0
Х7= 
Для восьмой строки: A=0, B=1, C=1, D=1
Х8= 
Для девятой строки: A=1, B=0, C=0, D=0
Х9= 
Для десятой строки: A=1, B=0, C=0, D=1
Х10= 
Для одиннадцатой строки: A=1, B=0, C=1, D=0
Х11= 
Для двенадцатой строки: A=1, B=0, C=1 D=1
Х12= 
Для тринадцатой строки: A=1, B=1, C=0, D=1
Х13= 
Для четырнадцатой строки: A=1, B=1, C=0, D=1
Х14=
Для пятнадцатой строки: A =1, B=1, C=1, D=0
Х15= 
Для шестнадцатой строки: A=1, B=1, C=1, D=1
Х16= 
Проверим условия срабатывания и несрабатывания Y.
Для первой строки состояния: A=0, B=0, C=0 D=0
Y1=0
Для второй строки: A = 0, B=0, C=0, D=1
Y2= 
Для третьей строки: A=0, B=0, C=1, D=0
Y3=  1
1 
Для четвертой строки: A=0, B=0,C=1,D=1
Y4= 
Для пятой строки: A=0, B=1, C=0, D=0
Y5= 
Для шестой строки: A=0, B=1, C=0,D=1
Y6= 
Для седьмой строки: A=0, B=1,C=1, D=0
Y7= 
Для восьмой строки: A=0, B=1, C=1, D=1
Y8= 
Для девятой строки: A=1, B=0, C=0, D=0
Y9= 
Для десятой строки: A=1, B=0, C=0, D=1
Y10= 
Для одиннадцатой строки: A=1, B=0, C=1, D=0
Y11= 
Для двенадцатой строки: A=1, B=0, C=1 D=1
Y12= 
Для тринадцатой строки: A=1, B=1, C=0, D=0
Y13= 
Для четырнадцатой строки: A=1, B=1, C=0, D=1
Y14= 
Для пятнадцатой строки: A =1, B=1, C=1, D=0
Y15= 
Для шестнадцатой строки: A=1, B=1, C=1, D=1
Y16= 
3.Проектирование релейно-контактного варианта системы логического
Управления.
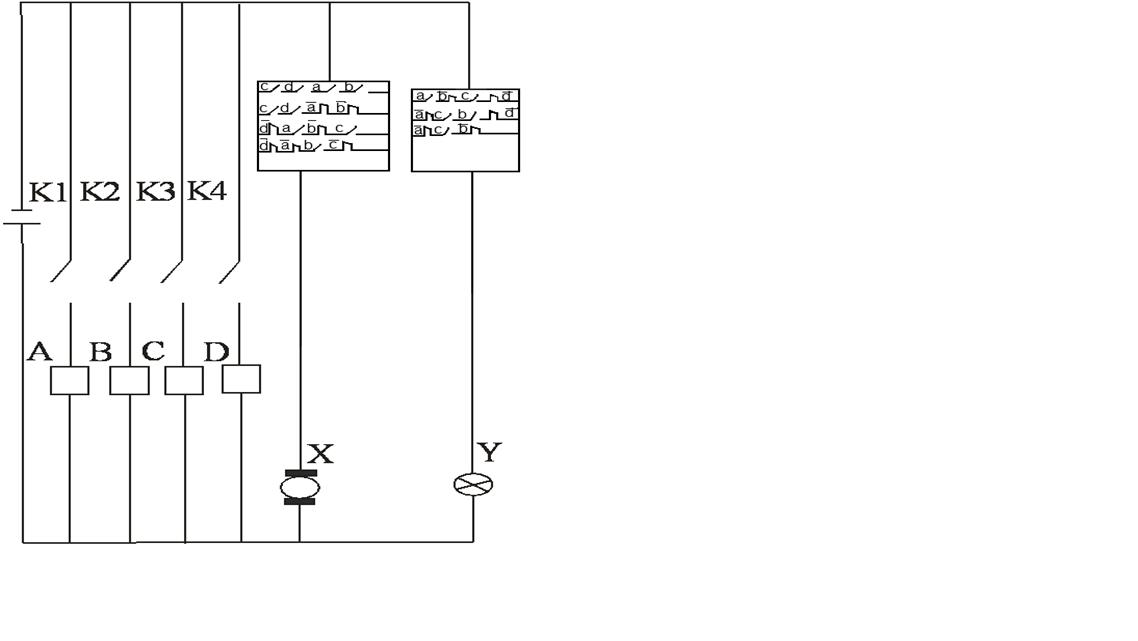
Рис. 1.
На рисунке 1 представлен релейно-контактный вариант проектируемой системы логического управления.
4. Проектирование бесконтактного варианта системы логического управления в базисе логических элементов «И-НЕ».
Бесконтактный вариант СЛУ выполним в базисе элементов «И-НЕ». Для этого следует логические функции для Х и Y записать в более удобном для выбранного базиса с использованием очевидных преобразований:
X=

Y= 
Легко представить бесконтактный вариант проектируемой СЛУ (рис.2).
Рис.2 БесконтактнаяСЛУ в базисе «И-НЕ».
Составление программы работы системы по п.1.1 для программируемого логического контроллера (типа ПЛК 100 RL ОВЕН) в среде CoDeSys на языке LD в соответствии с временными диаграммами (Приложение 3).
CoDeSys-это современный инструмент для программирования контроллеров (CoDeSysобразуется от слов ControllersDevelopmentSystem).
CoDeSys предоставляет программисту удобную среду для программирования контроллеров на языках стандарта МЭК 61131-3. Используемые редакторы и отладочные средства базируются на широко известных и хорошо себя зарекомендовавших принципах, знакомых по другим популярным средам профессионального программирования.
В соответствии с заданием составить программу работы системы программируемого логического контроллера (типа ПЛК 100 RL ОВЕН) в среде CoDeSys на языке LD с учетом временных диаграмм по варианту 9, которые изображены на рис.3.
ВАРИАНТ 6
После срабатывания Х исполнительный механизм Y сразу переходит в режим генерации импульсов и после 10 импульсов остановится.
На рисунке 4 представлено окно объявления переменных программы.

Рис.4
На рисунке 5 представлен листинг программы на языке LD в системе CoDeSys.

Рис.5
Пояснения к программе на языке LD в системе CoDeSys.
Первые четыре строки введены для удобства, чтобы в режиме эмуляции нажимая кнопки K1,K2, K3, K4 создавать желаемые комбинации состояний приемных элементов a, b, c и d.
5-6-я строки предназначены для реализации условий срабатывания исполнительных механизмов X и Y.
Чтобы реализовать работу исполнительных механизмов в соответствии с временными диаграммами, рассмотренными ранее (рис. 3) в 5-ой строке ввели функциональный блок TP таймер, длительность установили IN 3 секунды. В 6-ой строке мы установили 2 таймера TON, длительность IN 3секунды иTP, длительность 10 секунд.
В 7-ой строке мы установили триггер SR для запоминания состояния исполнительного элемента X.
Заключение
Широкое применение электрической энергии в промышленности является основой технического прогресса, повышения энерговооруженности и производительности труда. В последние годы многие производственные процессы не только полностью механизированы, но и автоматизированы. Широко применяется автоматизация контроля, регулирования и управления технологическими процессами с применением вычислительной техники. Все эти мероприятия осуществляются на базе электрификации, т.е. применения электрической энергии. В связи с этим непрерывно совершенствуется и усложняется отраслевое электрооборудование, устройства электроники и автоматики. Вместо отдельных машин, механизмов и станков все более широко используются автоматы, многопостовые агрегаты, автоматические линии. Новое совершенное оборудование и машины естественно требует в процессе эксплуатации более высокой квалификации специалистов.
В этих условиях значение электротехнической подготовки инженеров трудно переоценить. В условиях производства каждый инженер должен уметь грамотно применять современные средства механизации и автоматизации, в которых все в большей степени используются электротехнические и электронные устройства и установки, а также участвовать в проектировании и разработке автоматизированных промышленных установок и систем на базе ЭВМ и микропроцессорной техники.
Список литературы
1. Минаев И.Г., Шарапов В.М., Самойленко В.В., Ушкур Д.Г. Программируемые логические контроллеры в автоматизированных системах управления. Ставрополь: Агрус. – 2010-128с.
2. Петров И.В. Программируемые контроллеры. Стандартные языки и приемы прикладного программирования. М.: Солон-Пресс. – 2004. – 253с.
3. Парр Э.Программируемые контроллеры. М.: Бином . – 2007. – 516с.
4. Карпов Ю.Г. Теория автоматов. Учебник для вузов. М.: ПИТЕР. – 2002. – 206с.
5. Калабеков В.А. Цифровые устройства и микропроцессорные системы. /
В.А.Калабеков - М.: Горячая линия – Телеком, 2000.-С. 336с.
6. www.avtomet-stv.narod.ru.
|
из
5.00
|
Обсуждение в статье: Проверка выполнения частных условий срабатывания и несрабатывания исполнительных элементов спроектированной системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы