 |
Главная |


Расчет и выбор пусковых, тормозных и регулировочных сопротивлений
|
из
5.00
|
Для двигателей постоянного тока пуск, реверс, торможение, а также регулирование скорости должно осуществляться при наложенных на ток и момент ограничениях. В электроприводах постоянного тока с релейно-контакторной схемой управления ток якоря ограничивают введением на время пуска в цепь обмотки якоря двигателя добавочных сопротивлений.
Максимальный ток якоря двигателяIдв.maxследует ограничить из условия удовлетворительной коммутации на коллекторе на уровне
 (15)
(15)
где λI – коэффициент допустимой перегрузки двигателя по току.Обычно принимают λI = 2,2.
Найдем максимально допустимый ток якоря выбранного двигателя:

Построим график электромеханических характеристик электродвигателя:

Рис. 2.1 – Электромеханические характеристики электродвигателя:
0 – естественная электромеханическая характеристика;
1 – первая технологическая электромеханическая характеристика;
3 – первая пусковая электромеханическая характеристика электропривода;
4 – вторая пусковая электромеханическая характеристика электропривода
Замыкание второго пускового сопротивления Rд2 также необходимо производить при токе переключения Iпер.
Необходимо обратить внимание, чтобы на заключительном этапе разгона двигателя при переходе с последней пусковой характеристики на первую рабочую характеристику, бросок тока не превышал допустимый ток двигателя Iдвmax.Если это требование не выполняется, то ток переключения Iпернеобходимо поменять, несколько увеличив или уменьшив его.

Из уравнения электромеханической характеристики по заданным ωpi, Ii и известным Iдв.гор, Cн, Uн найдем добавочные сопротивления Ri для каждой из технологических характеристик:
 (16)
(16)
где ωpi – угловая скорость двигателя на i-ой характеристике;
Iсi – статический ток двигателя на i-ой характеристике.


Из уравнения электромеханической характеристики по известным Rдв.гор, cн,Uн и ω=0 найдем пусковое сопротивление Rп3 для первой пусковой характеристики 3, рис. 2.1, а также угловую скорость ωпер1, по достижении которой необходимо осуществить переход на вторую пусковую характеристику:


Далее, по известным Rдв.гор, cн,Uн и ωпер1 найдем пусковое сопротивление Rп4 для второй пусковой характеристики 4, рис. 2.1, а также угловую скорость ωпер2, по достижении которой необходимо осуществить переход на другую характеристику:


Добавочное сопротивление для третьей пусковой характеристики определяется по следующему выражению:

Очевидно, что при правильно подобранном токе переключения Iпер, номинал добавочного сопротивления для третьей пусковой характеристики Rп5 совпадает с номиналом добавочного сопротивления для работы на первой рабочей ступени R1. Поэтому дальнейший разгон двигателя будем осуществлять по электромеханической характеристике 1, рис. 2.1 первой рабочей ступени, то есть с введением в цепь якоря сопротивления Rп5=R1=0,4 Ом.
Таким образом, добавочные сопротивления для технологических и пусковых характеристик найдены.
Переход с первой рабочей точки во вторую рабочую точку будем осуществлять с помощью динамического торможения двигателя. Динамическое торможение осуществляется путем отключения якорной цепи двигателя от питающей сети и подключения к ней нагрузочного сопротивления. Схема динамического торможения двигателя постоянного тока независимого возбуждения приведена на рис 2.2.
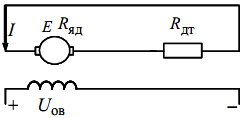
Рис. 2.2 - Схема включения двигателя постоянного тока независимого возбуждения в режиме динамического торможения
Уравнение электромеханической характеристики электропривода в режиме динамического торможения:
 (17)
(17)
где Rяц.дт=Rдв.гор+Rдт - сопротивление якорной цепи двигателя в режиме динамического торможения;
Rдт - сопротивление динамического торможения.
Так как динамическое торможение должно происходить при наложенных на момент и ток двигателя ограничениях(I≤Iдв.max), а торможение производится с технологической скорости ωp1=94,2 рад/сек,то выражение для расчета сопротивления динамического торможения приобретает следующий вид:

Как следует из расчетов, сопротивление динамического торможенияRдт=1,62 Ом.
После работы на второй рабочей ступени, необходимо затормозить электропривод. Применим торможение противовключением (характеристика 6) с последующим наложением механического тормоза при достижении угловой скорости, равной нулю. Рассчитаем добавочное сопротивление в якорной цепи для организации торможения противовключением:

При достижении нулевой скорости ω = 0 ток в якорной цепи составит:

Результаты проведенных расчетов сведем в табл. 2.
Таблица 2
| Первая пусковая электромеханическая характеристика,Rп3=0,8145 Ом | |||
| I, А | 0 | Iпер=184,4 | Iдв.max=264 |
| ω, рад/сек | 118,28 | 35,82 | 0 |
| Вторая пусковая электромеханическая характеристика,Rп4=0,581 Ом | |||
| I, А | 0 | Iпер=184,4 | Iдв.max=264 |
| ω, рад/сек | 118,28 | 59,14 | 35,82 |
| Первая технологическая электромеханическая характеристика,R1=0,4 Ом | |||
| I, А | 0 | Ic1=106,89 | Iдв.max=264 |
| ω, рад/сек | 118,28 | 94,2 | 59,14 |
| Динамическое торможение, характеристика,Rдт=1,62 Ом | |||
| I, А | 0 | Ic2=72,4 | -Iдв.max=-264 |
| ω, рад/сек | 0 | -32,97 | 94,2 |
| Вторая технологическая электромеханическая характеристика,R2=3,87 Ом | |||
| I, А | 0 | Ic2=72,4 | - |
| ω, рад/сек | 118,28 | -32,97 | - |
| Торможение противовключением, характеристика,Rпрот=1,05 Ом | |||
| I, А | 0 | Iкон=206,48 | Iдв.max=264 |
| ω, рад/сек | 118,28 | 0 | -32,97 |
По данным таблицы 2 построим электромеханические характеристики электропривода за полный рабочий цикл, приведенные на рис. 2.3.

Рис. 2.3 - Электромеханические характеристики электропривода за полный рабочий цикл:
0 – естественная электромеханическая характеристика;
1 – первая технологическая электромеханическая характеристика;
2 – вторая технологическая электромеханическая характеристика;
3 – первая пусковая характеристика электропривода;
4 – вторая пусковая характеристика электропривода;
5 – электромеханическая характеристика динамического торможения для перехода во вторую рабочую точку;
6 – электромеханическая характеристика торможения противовключением.
Схема силовой цепи для пуска двигателя постоянного тока приведена на рис. 2.4.

Рис. 2.4 - Схема силовой цепи для пуска электропривода постоянного тока
Определим сопротивления резисторов Rдоб1 , Rдоб2, Rдоб3, Rдоб4, Rдоб5 и Rдоб6 непосредственно включаемых в якорную цепь двигателя.Очевидно, они будут отличаться от сопротивлений якорной цепи двигателя Rп3, Rп4, R1, R2 и Rпрот, используемых для расчета электромеханических характеристик электропривода, т.к. физические резисторы, используемые для построения схемы электропривода, набираются из отдельных резисторов.
Так, для работы на второй электромеханической характеристике 2, рис. 2.3 с технологической скоростью ωp2 в цепь якоря двигателя должно быть введено максимальное сопротивление R2 = 3,87 Ом, полученное путем сложения сопротивлений всех резисторов, включенных последовательно в якорную цепь двигателя:

При пуске, на первых двух пусковых характеристиках, а затем на первой рабочей характеристике необходимо иметь в якорной цепи следующие сопротивления:



Из приведенных соотношений можно определить:


Для режима динамического торможения (характеристика 5, рис. 2.3) нам требуется сопротивлениеRдт=1,62 Ом. Очевидно, что оно может быть получено путем добавления Rдоб3 к цепочке резисторов Rп4:

Теперь можно определить величину сопротивления Rдоб4:

Аналогично определяем величины сопротивлений Rдоб5 и Rдоб6:


Таким образом, все сопротивления резисторов якорной цепи для организации полного рабочего цикла электропривода найдены.
Принципиальная схема силовых цепей электропривода для полного цикла работы приведена на рис. 2.5. Рассмотрим по ней каждый режим работы электропривода.

Рис. 2.5 - Схема силовых цепей электропривода для полного цикла работы
При пуске двигателя по первой пусковой характеристике 3, рис. 2.3 замкнуты контакты пускателей КМ, КМ3 и КМ4, а остальные контакты разомкнуты. Далее, при переходе на вторую пусковую характеристику 4, рис. 2.3 дополнительно замыкается контакт КМ1, исключающий из цепи реостаты Rдоб3 и Rдоб4. При дальнейшем разгоне дополнительно к уже замкнутым контактам КМ, КМ3, КМ4, КМ1 замыкаются контакты пускателя КМ2 и двигатель переходит на разгон по первой рабочей характеристике 1, рис. 2.3 до скорости ωp1 и работает на ней отведенное время – 15 с.
После работы на первой рабочей ступени, необходимо по характеристике динамического торможения 5, рис. 2.3 перейти на вторую рабочую ступень. Это осуществляется путем размыкания контактов пускателя КМ1 и замыканием контактов пускателя КМ5. По завершении переходного процесса, схема переключается для работы на второй рабочей ступени.
При работе на второй технологической характеристике 2, рис. 2.3 со скоростью ωp2 в силовой якорной цепи (см. рис. 2.5) замкнут контакт пускателя КМ, а контакты КМ1, КМ2, КМ3, КМ4, КМ5 разомкнуты. После работы на второй технологической ступени в течение 18 с. электродвигатель необходимо затормозить.
В режиме торможения противовключением срабатывает контактор КМ6 и своими контактами изменяет полярность питающего напряжения якорной цепи. Наряду с контактами КМ6, должен быть замкнут контакт КМ4, а остальные контакты должны быть разомкнуты. Особое внимание следует обратить на отключение контактов КМ, так как при их одновременном включении с контактами КМ6 произойдет короткое замыкание.
|
из
5.00
|
Обсуждение в статье: Расчет и выбор пусковых, тормозных и регулировочных сопротивлений |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы