 |
Главная |


Расчет переходных характеристик за цикл работы
|
из
5.00
|
Переходным, или динамическим, режимом электропривода называется режим работы при переходе из одного установившегося состояния привода к другому, происходящему во время пуска, торможения, реверсирования и резкого приложения нагрузки на валу. Эти режимы характеризуются изменениями ЭДС, угловой скорости, момента и тока. Переходные процессы тока и скорости электропривода постоянного тока независимого возбуждения при линейных статических характеристиках двигателя и производственного механизма можно рассчитать по формулам:
 (18)
(18)
где Iнач – начальное значение тока двигателя, А;
Iуст – установившееся значение тока двигателя при моменте нагрузки Mс = Муст, А;
ωуст – установившаяся угловая скорость двигателя при моменте нагрузки Mс = Муст, рад/сек;
ωнач – начальное значение угловой скорости, рад/сек;
Тм – электромеханическая постоянная времени электропривода, с.
Расчет электромеханических постоянных времени Тмi для каждой из реостатных характеристик осуществляется в соответствии с выражением:
 (19)
(19)
где Rяц– суммарное сопротивление якорной цепи на соответствующей характеристике, Ом;
cн – коэффициент ЭДС, В×с/ рад;
J∑ – суммарный момент инерции, приведенный к валу двигателя, кг·м2;
 (20)
(20)
где k = (1,05÷1,3) – коэффициент, учитывающий момент инерции редуктора;
Jдв – момент инерции двигателя, кг·м2; Jдв = 0,8;
Jм – момент инерции производственного механизма, кг·м2;Jм = 60;
iст.р – стандартное передаточное отношение редуктора; iст.р =9.
Учитывая, что моменты инерции двигателя Jдв и производственного механизма Jм за цикл работы электропривода не изменяются,найдем суммарный момент электропривода, приняв значение коэффициента k = 1,1. Тогда

Время tппi работы двигателя на i-ой характеристике, при изменении момента в пределах от Мнач до Мкон , определяется по формуле:
 (21)
(21)
где Mнач и Mкон – значения моментов в начале и конце рассматриваемого переходного процесса;
Mуст – установившийся момент двигателя.
Учитывая, что электромагнитный момент двигателя постоянного тока пропорционален току обмотки якоря, уравнение для расчета времени переходного процесса работы двигателя на произвольной характеристике можно преобразовать к виду:
 (22)
(22)
где Iнач и Iкон – значения токов двигателя, взятые из графика электромеханической характеристики в начале и конце рассматриваемого переходного процесса;
Iуст – установившийся ток якоря двигателя.
Первая пусковая характеристика (характеристика 3 на рис. 2.3,
2.10).
Сопротивление якорной цепи:

Электромеханическая постоянная времени:

Время переходного процесса пуска двигателя на первой пусковой характеристике:
 (23)
(23)
где Iнач3 – максимально допустимый ток якоря двигателя, Iдв.max = 264 А;
Iкон3– ток переключения, Iпер = 184,4 А;
Iуст3 – установившееся значение тока двигателя, Iуст3 = Ic1 = 106,89 А.

Уравнение для расчета переходного процесса тока якоря:
 (24)
(24)
где Iнач3 – начальное значение тока якоря, равное допустимому току двигателя, Iнач3 = Iдв.max = 264 А;
Iуст3 – установившееся значение тока двигателя, Iуст3 = Ic1 = 106,89 А.
После подстановки численных значений параметров:

Уравнение для расчета переходного процесса скорости пуска по первой пусковой характеристике 3, рис. 2.3:
 (25)
(25)
где ωнач3 – начальное значение угловой скорости;
ωнач3 = 0, рад/сек;
ωуст3 – установившаяся угловая скорость двигателя, определяется по первой пусковой характеристике при статическом токе двигателя,

После подстановки численных значений параметров:

Расчет переходных процессов произведем в программной среде MathCAD, а численные значения параметров снимем с помощью трассировщика.
Графики переходных процессов скорости ω = f(t) и тока I = f(t) пуска двигателя по первой пусковой характеристике 3 приведены на рис. 2.6.


Рис. 2.6 - Графики переходных процессов скорости ω = f(t) и тока I = f(t) пуска двигателя по первой пусковой характеристике
Расчетные значения тока и скорости в переходных процессах на первой пусковой характеристике 3, рис. 2.6 сведем в табл. 3.
Таблица 3
| t, c | 0,2 | 0,4 | 0,6 | 0,8 | 1,2 | 1,4 | 1,6 | 1,8 | 1,99 | ||
| I, А | 253,24 | 243,22 | 233,89 | 225,19 | 217,09 | 209,55 | 202,52 | 195,97 | 189,87 | 184,47 | |
| ω, рад/сек | 1,663 | 3,2122 | 4,6553 | 5,9996 | 7,2519 | 8,4184 | 9,505 | 10,517 | 11,46 | 12,296 |
Вторая пусковая характеристика (характеристика 4 на рис. 2.10).
Сопротивление якорной цепи:

Электромеханическая постоянная времени:

Время переходного процесса пуска двигателя на второй пусковой характеристике:
 (26)
(26)
где Iнач4 – максимально допустимый ток якоря двигателя, Iдв.max = 264 А;
Iкон4– ток переключения, Iпер = 184,4 А;
Iуст4 – установившееся значение тока двигателя, Iуст3 = Ic1 = 106,89 А.

Уравнение для расчета переходного процесса тока якоря:
 (27)
(27)
где Iнач4 – начальное значение тока якоря, равное допустимому току двигателя, Iнач4 = Iдв.max = 264 А;
Iуст4 – установившееся значение тока двигателя, Iуст4 = Ic1 = 106,89 А.
После подстановки численных значений параметров:

Уравнение для расчета переходного процесса скорости при пуске по второй пусковой характеристике 4, рис. 2.10:
 (28)
(28)
где ωнач4 – начальное значение угловой скорости;
ωуст4 – установившаяся угловая скорость двигателя.
Начальное значение угловой скорости ωнач4второй пусковой характеристики найдем при максимально допустимом токе двигателя Iдв.max = 264 А из выражения:

Установившуюся угловую скорость двигателя ωуст4 определим по второй пусковой характеристике 4, рис. 7.10 при статическом токе двигателяIуст4 = Ic1 = 106,89 А:

После подстановки численных значений параметров:

Графики переходных процессов скорости ω = f(t) и тока I = f(t) пуска двигателя по второй пусковой характеристике 4 приведены на рис. 2.7.


Рис. 2.7 - Графики переходных процессов скорости ω = f(t) и тока I = f(t) пуска двигателя по второй пусковой характеристике
Расчетные значения тока и скорости в переходных процессах по второй пусковой характеристике 4, рис. 2.10 сведем в табл. 4.
Таблица 4
| t, c | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,82 | |
| I, А | 256,79 | 249,92 | 243,36 | 237,1 | 231,13 | 225,43 | 219,99 | 214,81 | 213,8 | |
| ω, рад/сек | -57.08 | -52.29 | -47.73 | -43.37 | -39.21 | -35.25 | -31.46 | -27.85 | -24.4 | -23.73 |
Первая технологическая характеристика (характеристика 1 на рис. 2.10)
Сопротивление якорной цепи:

Электромеханическая постоянная времени:

Время переходного процесса пуска двигателя на первую технологическую характеристику:

Уравнение для расчета переходного процесса тока якоря:
 (29)
(29)
где Iнач1 – начальное значение тока якоря, равное допустимому току двигателя, Iнач1 = Iдв.max = 264 А;
Iуст1 – установившееся значение тока двигателя, Iуст1 = Ic1 = 106,89 А.
После подстановки численных значений параметров:

Уравнение для расчета переходного процесса скорости пуска по первой технологической характеристике:
 (30)
(30)
где ωнач1 – начальное значение угловой скорости;
ωуст1 – установившаяся угловая скорость двигателя;
ωуст1 =ωр1 = 94,2 рад/сек.
Начальное значение угловой скорости ωнач1 первой технологической характеристики найдем при максимально допустимом токе двигателя Iдв.max = 264 А из выражения:

После подстановки численных значений параметров:

Графики переходных процессов скорости ω = f(t) и тока I = f(t) пуска двигателя дляпервой технологической характеристики1 приведены на рис. 2.8.

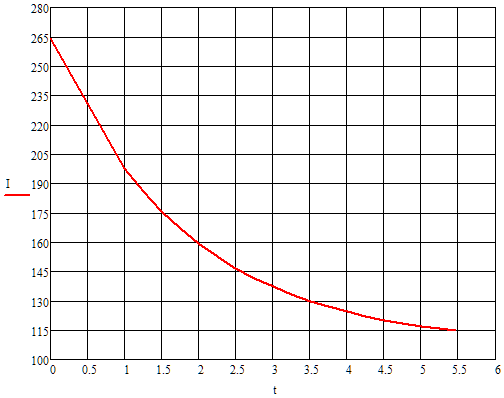
Рис. 2.8 - Графики переходных процессов скорости ω = f(t) и тока I = f(t) разгона двигателя по первой технологической характеристике
Расчетные значения тока и скорости в переходных режимах характеристики 1, рис. 2.10 сведем в табл. 5.
Таблица 5
| t, c | 5,46 | ||||||
| I, А | 197.58 | 159.24 | 137.11 | 124.34 | 116.96 | 114.71 | |
| ω, рад/сек | -31.39 | 21.701 | 52.349 | 70.041 | 80.254 | 86.149 | 87.947 |
Время работы на первой технологической характеристикеtp1 = 15 сек.
Характеристика динамического торможения при переходе на вторую технологическую характеристику (характеристика 5 на рис. 2.10)
Вычислим сопротивление якорной цепи для режима динамического торможения двигателя:

Электромеханическая постоянная времени:

Необходимо обратить внимание, что для расчета времени переходного процесса динамического торможения двигателя при переходе на вторую технологическую характеристику, требуется разбить характеристику 5 рис. 2.3на два участка – первый участок5_1 для ω ≥ 0и второй участок5_2 для ω ≤ 0на рис. 2.10.
Вычислим время переходного процесса на участке 5_1 электромеханической характеристики 5, рис. 2.10:
 (31)
(31)
где Iнач5_1 – максимально допустимый ток якоря двигателя,
Iнач5_1 = -Iдв.max = -264 А;
Iкон5_1= 0– конечное значение тока якоря;
Iуст5_1 – установившееся значение тока двигателя,
Iуст5_1 = Ic1 = 106,89 А.

Уравнение для расчета переходного процесса тока якоря на участке 5_1 электромеханической характеристики 5, рис. 2.10:
 (32)
(32)
где Iнач5_1 – начальное значение тока якоря, равное допустимому току двигателя, Iнач5_1 = -Iдв.max = -264 А;
Iуст5_1 – установившееся значение тока двигателя,
Iуст5_1 = Ic1 = 106,89 А.
После подстановки численных значений параметров:

Уравнение для расчета переходного процесса скорости электродвигателя на участке 5_1 электромеханической характеристики 5, рис. 2.10:
 (33)
(33)
где ωнач5_1 – начальное значение угловой скорости;
ωнач5_1 =ωр1 = 94,2 рад/сек.;
ωуст5_1 – установившаяся угловая скорость двигателя,

После подстановки численных значений параметров:

Графики переходных процессов скорости ω = f(t) и тока I = f(t)для участка 5_1, рис. 2.10 приведены на рис. 2.9.


Рис. 2.9 - Графики переходных процессов скорости ω = f(t) и тока I = f(t) участка 5_1 характеристики 5 режима динамического торможения двигателя при переходе на вторую технологическую характеристику 2
Расчетные значения тока и скорости режима динамического торможения двигателя для первого участка характеристики 5 сведем в табл. 6.
Таблица 6
| t, c | 0,4 | 0,8 | 1,2 | 1,6 | 2,4 | 2,8 | 3,2 | 3,51 | ||
| I, А | -264 | -215 | -172.4 | -135.5 | -103.4 | -75.6 | -51.47 | -30.52 | -12.35 | 0.062 |
| ω, рад/сек | 94.2 | 69.313 | 47.717 | 28.978 | 12.716 | -1.395 | -13.64 | -24.27 | -33.49 | -39.79 |

Рис. 2.10 - Электромеханические характеристики электропривода за полный рабочий цикл с обозначением некоторых установившихся скоростей вращения якоря:
0 – естественная электромеханическая характеристика;
1 – первая технологическая электромеханическая характеристика;
2 – вторая технологическая электромеханическая характеристика;
3 – первая пусковая характеристика электропривода;
4 – вторая пусковая характеристика электропривода;
5_1 – первый участок электромеханической характеристики 5 динамического торможения;
5_2 – второй участок электромеханической характеристики 5 динамического торможения для перехода во вторую рабочую точку;
6 - электромеханическая характеристика торможения противовключением.
Далее вычислим время переходного процесса на участке 5_2 электромеханической характеристики 5, рис. 2.10:

Найдем суммарное время переходного процесса перехода двигателя с первой рабочей точки на вторую рабочую точку по характеристике 5:

Уравнение для расчета переходного процесса тока якоря на участке 5_2 электромеханической характеристики 5, рис. 2.10:
 (34)
(34)
где Iнач5_2 = 0 – начальное значение тока якоря;
Iуст5_2 – установившееся значение тока двигателя,
Iуст5_2 = Ic2 = 72,4 А.
После подстановки численных значений параметров:

Уравнение для расчета переходного процесса скорости электродвигателя на участке 5_2 электромеханической характеристики 5:
 (35)
(35)
где ωнач5_2 = 0– начальное значение угловой скорости;
ωуст5_2 – установившаяся угловая скорость двигателя при токе Iс2,
ωуст5_2 = ωр2 = -32,97 рад/сек.
После подстановки численных значений параметров:

Графики переходных процессов скорости ω = f(t) и тока I = f(t)для участка 5_2, рис. 2.10 приведены на рис. 2.11.


Рис. 2.11 - Графики переходных процессов скорости ω = f(t) и тока I = f(t) участка 5_2 характеристики 5 режима динамического торможения двигателя при переходе на вторую технологическую характеристику 2
Расчетные значения тока и скорости режима динамического торможения двигателя для второго участка характеристики 5, рис. 2.10 сведем в табл. 7.
Таблица 7
| t, c | 8,46 | |||||||||
| I, А | 21.615 | 36.777 | 47.412 | 54.873 | 60.105 | 63.776 | 66.351 | 68.157 | 68.795 | |
| ω, рад/сек | -9.843 | -16.75 | -21.59 | -24.99 | -27.37 | -29.04 | -30.22 | -31.04 | -31.33 |
Время работы на второй технологической характеристикеtp2 = 18 сек.
Характеристика торможения противовключением (характеристика 6 на рис. 2.10)
Торможение начинается с угловой скорости ωнач = ωp2 – угловой скорости двигателя во второй рабочей точке. Под установившейся скоростью принимается фиктивная скорость ωуст6 , определяемая пересечением электромеханической характеристики режима торможения противовключением и статического тока Iс2 . При достижении скорости, равной нулю, необходимо остановить электропривод путем отключения двигателя от сети и наложением электромеханического тормоза. Начальным значением тока режима динамического торможения являетсядопустимый ток двигателя Iдв.max. Установившимся значением тока является статический ток Iс2.
Сопротивление якорной цепи режима торможения противовключением:

Электромеханическая постоянная времени:

Уравнение для расчета переходного процесса торможения противовключением (характеристика 6, рис. 2.10) для тока якоря:
 (36)
(36)
где Iнач6 – начальное значение тока якоря, равное допустимому току двигателя, Iнач6 = Iдв.max = 264 А;
Iуст6 – установившееся значение тока двигателя,
Iуст6 = Ic2 = 72,4 А.
После подстановки численных значений параметров:

При достижении нулевой скорости ω = 0 ток в якорной цепи составит:

Время торможения до полной остановки, когда ω = 0 , может быть определено из уравнения:
 (37)
(37)
где Iнач6 – максимально допустимый ток якоря двигателя,
Iнач6 = Iдв.max = 264 А;
Iкон6– ток в якорной цепи при ω = 0, Iкон6 = 206,48
Iуст6 – установившееся значение тока двигателя,
Iуст6 = Ic2 = 72,4 А.

Уравнение для расчета переходного процесса скорости режима торможения противовключением (характеристика 6, рис. 2.10):
 (38)
(38)
где ωнач6 – начальное значение угловой скорости,
ωуст6 = ωр2 = -32,97 рад/сек;
ωуст6 – установившаяся угловая скорость двигателя; определяется по характеристике торможения противовключением при статическом токе двигателя Iс2:

После подстановки численных значений параметров:

Графики переходных процессов скорости ω = f(t) и тока I = f(t)торможения двигателя противовключением характеристики 6 приведены на рис. 2.12.


Рис. 2.12 - Графики переходных процессов скорости ω = f(t) и тока I = f(t) режима торможения двигателя противовключением (характеристика 6)
Расчетные значения тока и скорости в процессе торможения двигателя противовключением (характеристика 6, рис. 2.10) сведем в табл. 8.
Таблица 8
| t, c | 0,2 | 0,4 | 0,6 | 0,8 | 1,2 | 1,4 | 1,6 | 1,8 | 1,83 | ||
| I, А | 244.16 | 226.38 | 210.44 | 196.15 | 183.34 | 171.85 | 161.56 | 152.33 | 144.05 | 142.89 | |
| ω, рад/сек | -33 | -21.61 | -11.42 | -2.282 | 5.907 | 13.25 | 19.83 | 25.73 | 31.02 | 35.76 | 36.424 |
Графики переходных процессов скорости ω = f(t) и тока I = f(t) для полного цикла работы электропривода приведены на рисунках 2.13 и 2.14 соответственно.

Рис. 2.13 - График переходных процессов скорости ω = f(t) для полного цикла работы электропривода.
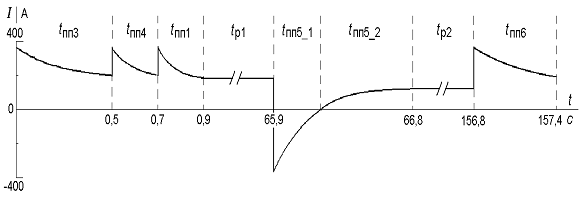
Рис. 2.14 - График переходных процессов тока I = f(t) для полного цикла работы электропривода.
|
из
5.00
|
Обсуждение в статье: Расчет переходных характеристик за цикл работы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы