 |
Главная |


Построить электрическую схему корректирующего устройства
|
из
5.00
|
Найти уравнение состояния в нормальной форме
Wзам= 

Разделим правую и левую части на 0,0156
Получим: 
n=3,m=1









Выполнить исследование системы на управляемость и наблюдаемость замкнутой системы
Исследование на управляемость
B= 
A= 
AB= 
 =
= 
 =
= 
Y= 
Y= 
Ранг матрицы=3, система управляема
det(Y)=1
Исследование на наблюдаемость



т.е ранг матрицы равен 3 то система вполне наблюдаема
Это же задание выполнено в задание 4 другим способом
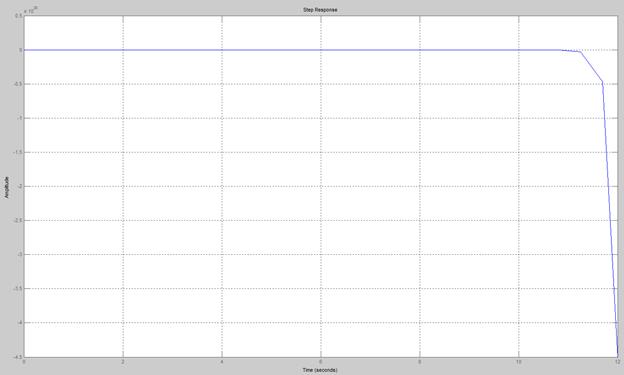
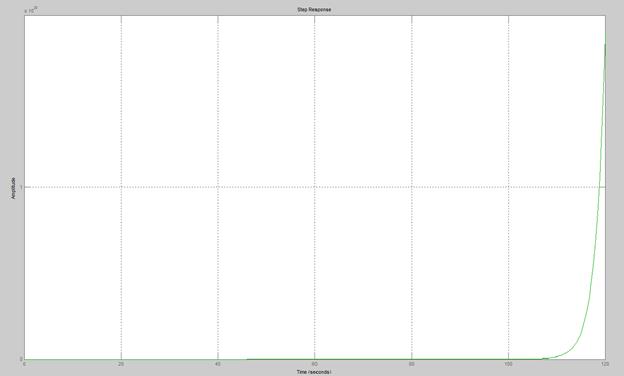
Рассчитать модальное управление и построить переходной процесс системы с модальным управлением
WZAM =
1080 s + 43200
-----------------------------------
s^3 + 44.4 s^2 + 177.6 s + 4.326e04
WZAM=ss(WZAM)
WZAM =
a =
x1 x2 x3
x1 -44.4 -5.55 -42.25
x2 32 0 0
x3 0 32 0
b =
u1
x1 8
x2 0
x3 0
c =
x1 x2 x3
y1 0 4.219 5.273
d =
u1
y1 0
Continuous-time state-space model.
>> [a,b,c,d]=ssdata(WZAM)
a =
-44.4000 -5.5500 -42.2500
32.0000 0 0
0 32.0000 0
b =
c =
0 4.2188 5.2734
d = 0
y=ctrb(WZAM)
y =
1.0e+04 *
0.0008 -0.0355 1.4350
0 0.0256 -1.1366
0 0 0.8192
rank(y)
ans =3
H=obsv(WZAM)
H = 1.0e+03 *
0 0.0042 0.0053
0.1350 0.1688 0
-0.5940 -0.7493 -5.7038
rank(H)
ans = 3
k=[0.5;-15;-3]
k =
0.5000
-15.0000
-3.0000
[k1]=acker(a,b,k)
k1 = -3.3625 -0.5531 -5.2840
WZAM2=ss(a-b*k1,b,c,d)
WZAM2 =
a =
x1 x2 x3
x1 -17.5 -1.125 0.02197
x2 32 0 0
x3 0 32 0
b =
u1
x1 8
x2 0
x3 0
c =
x1 x2 x3
y1 0 4.219 5.273
d =
u1
y1 0
Continuous-time state-space model.
step(WZAM,WZAM2)
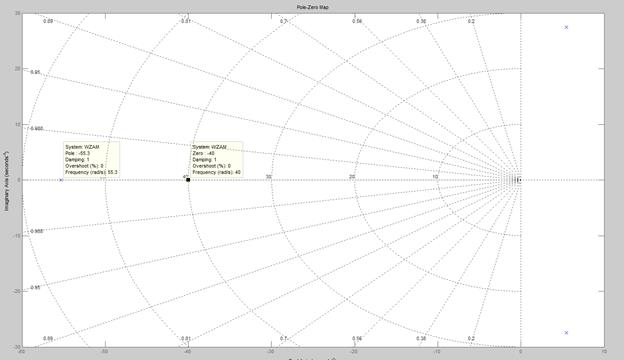
Найти нули и корни замкнутой системы и определить устойчивость системы
WZAM =
1080 s + 43200
-----------------------------------
s^3 + 44.4 s^2 + 177.6 s + 4.326e04
Нули замкнутой системы:
zero(WZAM)
ans = -40
Корни замкнутой системы:
pole(WZAM)
ans =
-55.3246
5.4623 +27.4256i
5.4623 -27.4256i
A=[44.4,4.32,0;1,177.6,0;0,1,4.32]
A = 44.4000 4.3200 0
1.0000 177.6000 0
0 1.0000 4.3200
det(A)
ans =3.4046e+04
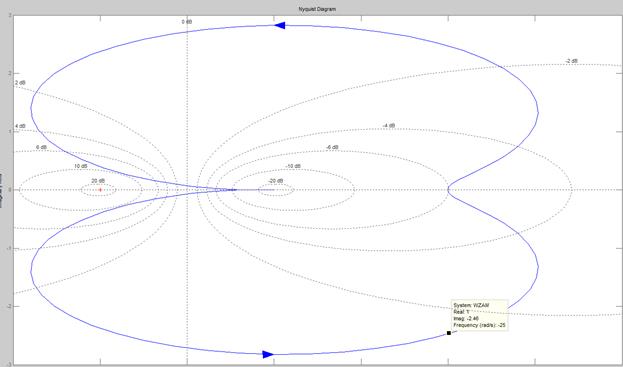
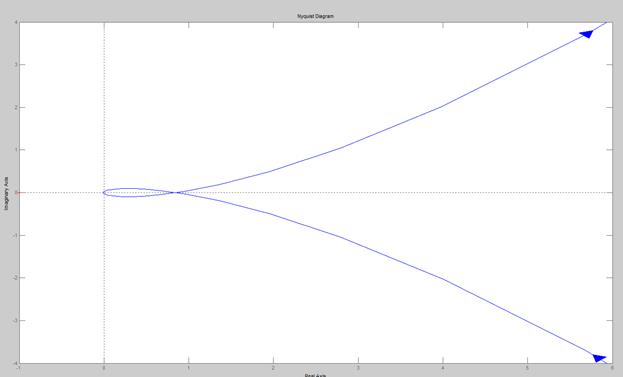
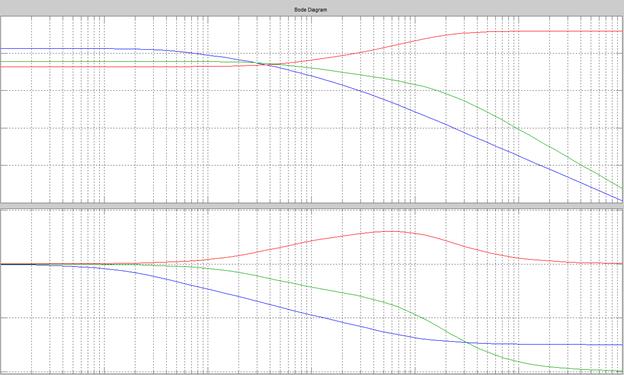
Определить устойчивость замкнутой системы по критерию Найквиста
Wзам=
Для того, чтобы замкнутая система была устойчива, необходимо и достаточно, чтобы разница между числом положительных и отрицательных переходов была равна l/2, где l- это число неустойчивых полюсов функции L(s). Начальная точка на оси абсцисс левее точки (-1;0) считается за половину перехода
Построить область устойчивости методом Д-разбиения по параметру К1 и построить переходной процесс для К1 из области устойчивости
K2=x



x(jw)= 



1) Где v=0


2) Где u=0

V(-1,23)=-0,000123+0,022755=0,02
V(1,23)=0,000123-0,022755=-0,02
A=[0.69,0.067,0;0.0156,2.775,0;0,0.69,0.067]
A = 0.6900 0.0670 0
0.0156 2.7750 0
0 0.6900 0.0670
det(A)
ans = 0.128 (устойчива)
Рассчитать корректирующее устройство методом логарифмических частотных характеристик.






20lgA=20lg675=56,6

20lgKку=20lg32=39,8
20lgKж=20lg39=89,1

Lку=Lж-Lисх





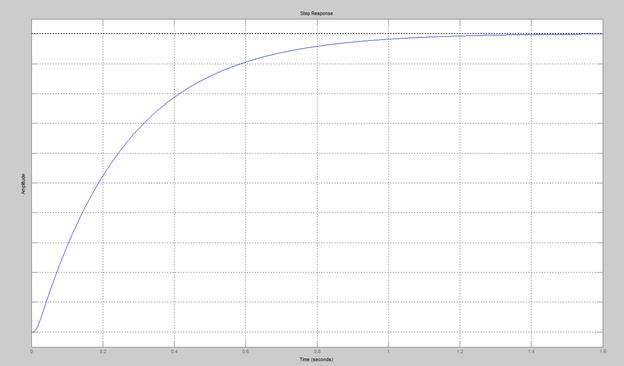
Выполнить проверочный расчет




Построить переходной процесс системы после коррекции
Step(Wж)
Построить электрическую схему корректирующего устройства



Расчет для 


 Ом
Ом

Расчет 
 Ом
Ом


Пример работы №2.
Содержание
Введение
1. Исходные данные для расчета
2. Получение передаточных функций разомкнутой и замкнутой системы
3. Нахождение уравнения состояния в нормальной форме
4. Выполнение исследования системы на управляемость и наблюдаемость замкнутой системы
5. Рассчитывание модального управления и построение переходного процесса системы с модальным управлением
6. Нахождение нулей и корней замкнутой системы и определение устойчивости системы
7. Определение устойчивости замкнутой системы по критерию Найквиста
8. Построение области устойчивости методом Д-разбиения по параметру К1 и построение переходного процесса для К1 из области устойчивости
9. Рассчитывание корректирующего устройства методом логарифмических частотных характеристик
10. Выполнение проверочного расчета
11. Построение переходного процесса системы после коррекции
12. Построение электрической схемы корректирующего устройства.
Введение
Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения), изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений.
В курсовой работе выполнен анализ и синтез замкнутой линейной системы автоматического регулирования САР. При выполнении курсовой работы решаются вопросы, охватывающие почти разделы теории стационарных непрерывных линейных систем автоматического регулирования.
Большое внимание уделено преобразованию структурных схем и составлению передаточных функций системы, различным способам исследования устойчивости, построению переходного процесса, оценке качества систем в установившемся и переходном режимах, а также синтезу корректирующего устройства, обеспечивающего заданные показатели качества регулирования.
Решение отдельных задач курсовой работы требует применения справочного материала, основная часть которого приводятся в методических указаниях.
Приведенные методы расчета позволяют решать задачи с использованием электронной вычислительной техники на основе компьютерной программы Matlab.
1. Исходные данные для расчета.
Исходная схема объекта управления
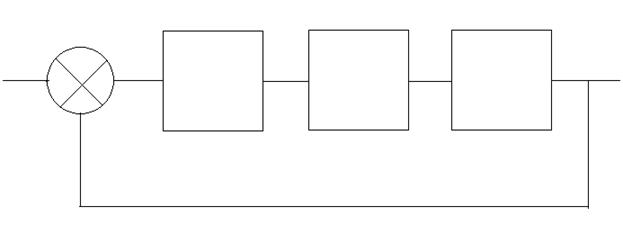
Числовые данные.
| № | К1 | К2 | Т2 | К3 | Т3 | Т4 | Х |
| 0,5 | 0,05 | К1 |
|
из
5.00
|
Обсуждение в статье: Построить электрическую схему корректирующего устройства |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы