 |
Главная |


Построение АФХ по каналу регулирующего воздействия
|
из
5.00
|
Министерство образования и науки Российской Федерации
Федеральная служба по надзору в сфере образования и науки
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Казанский национальный исследовательский технологический
Университет»
(ФГБОУ ВПО КНИТУ)
Кафедра систем автоматизации и управления технологическими процессами (САУТП)
Защищена ________________
(Дата)
с оценкой ________________
КУРСОВАЯ РАБОТА
по дисциплине
«Теория автоматического управления»
«РАСЧЕТ И ИССЛЕДОВАНИЕ АСР ТЕМПЕРАТУРЫ»
Руководитель
Доцент ____ (А.А.Усманова)
Исполнитель
Студент гр.819131 _(И.О.Гаранин)
Казань, 2012
Содержание
| Стр. | |
| Исходные данные | |
| Описание АСР. Функциональная и структурная схемы | |
| Определение параметров ПФ по каналу регулирования | |
| Построение АФХ по каналу регулирующего воздействия | |
| Настройки регуляторов | |
| Переходные процессы | |
| Анализ качества переходных процессов | |
| Определение эффективной полосы пропускания частот АСР | |
| Приложения |
Курсовая работа по
Теории автоматического управления
“Расчет и исследование динамики
автоматической системы регулирования”
Вариант 1-12
Исходные данные: Канал регулирующего воздействия (изменение задания регулятору на 3 °С) кривая разгона объекта:
таблица 1
| Время, t | 0,5 | 1,5 | 2,5 | 3,5 | ||||
| Параметр, q | 200,9 | 201,6 | 206,9 | 210,5 | 213,3 | 218,5 | 222,8 |
продолжение таблицы 1
| Время, t | 4,5 | 5,5 | 6,5 | ||||
| Параметр, q | 226,5 | 228,1 | 229,5 |
Канал возмущающего воздействия (изменение расхода продукта на 20 % хода регулирующего органа) - передаточная функция объекта в виде апериодического звена 1-го порядка Т=1,6 мин. , K=0,2. 
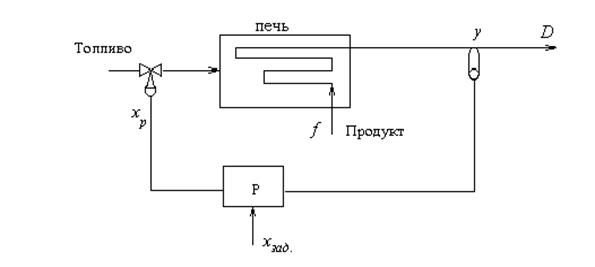
Описание:
1. Описание АСР: функциональная и структурная схема системы, передаточные ф., системы по каналам регулирования и возмущения.
2. Определение параметров передаточной функции объекта по каналу регулирования путем обработки экспериментальной переходной функции. Проверка адекватности полученной модели.
3. Построение АФХ объекта по каналам регулирующего и возмущающего воздействий.
4. Построение в плоскости параметров настройки ПИ-регулятора границы области устойчивости и границы области заданного запаса устойчивости по критерию m=0,221
5. Определение оптимальных настроек П, И, ПИ, ПИД – регуляторов
6. Построение графиков переходных процессов АСР с ПИ, ПИД регуляторами:
· при ступенчатом воздействии по каналу регулирования
· при ступенчатом воздействии по каналу возмущения
7. Анализ качества переходных процессов в системе с разными законами регулирования.
8. Определение эффективной полосы пропускания частот АСР.
1. Описание АСР:
Функциональная схема
|
Структурные схемы
 |
 - передаточная функция п о каналу регулирования
- передаточная функция п о каналу регулирования
 |
| |||




 - передаточная функция по каналу возмущения
- передаточная функция по каналу возмущения
2. Определение параметров ПФ по каналу регулирования:
Построение математической модели линейной системы по экспериментальной переходной функции производится в следующем порядке:
· На основании формы переходной функции и в зависимости от физических свойств исследуемой системы устанавливается вид передаточной функции модели[1];
· Определяются значения коэффициентов передаточной функции из условия наилучшего приближения модели и объекта;
· Производится оценка точности аппроксимации:
Рассмотрим метод площадей:
Рассмотрим функцию h(t), которая получена из экспериментальной переходной функции объекта путем исключения чистого запаздывания t и нормировки. Пусть h(0)=h’(0)=0.
При аппроксимации функции h(t) на практике обычно задаются следующими структурами передаточной ф. модели:
 | ||
|

|

обратное передаточной функции можно разложить в ряд по степеням p:
|

Очевидно, что для модели 1.1: a1=S1; a2=S2; a3=S3;
для модели 1.2: a1=S1; a2=S2; a3=S3;
для модели 1.3: коэффициенты b1 , a1 , … ,bi , ai где i=1,2,3 связаны с коэффициентами Si разложения 1.4 системой уравнений:
| a1=b1+S1 ; | a3=b1S2+S3 ; |
| (1.5) | |
| a2=b1S1+S2 ; | 0=b1S3+S4 ; |
Для определения Si воспользуемся связью между S и некоторыми функциями от (1-h). Величину L(1-h) можно представить так:
|
Отсюда:
|
|

Разложим функцию e-pt в ряд по степеням pt:
|

Подставив этот ряд в уравнение (1.6), получим с учетом формулы (1.4) выражение:
| |||
|


Из выражения (1.8) следует, что коэффициенты Si связаны с переходной функцией h(t) соотношением:
 | |||
|
|

Моментом i-го порядка функции 1-h(t) называется несобственный интеграл вида:
|
тогда:
S1 = M0 ;
S2 = S1 М0 - M1 = S12 – M1;
S3 = S2 М0 – S1 M1 + (1/2)* M2 ;
S4 = S3 М0 - S2 M1 + (1/2)*S1 M2 – (1/6)*M3 ;
Определив по графику h(t) значения Mi методом численного интегрирования и вычислив из соотношений величины “площадей” Si , определяют значения коэффициентов передаточной функции.
Выбор вида передаточной функции модели производится из следующих соображений, если коэффициенты S1 , S2 , S3 положительны, то в зависимости от вида функции h(t) задаются моделью (1.1) или (1.2), если хоть один из коэффициентов S1 , S2 , S3 отрицателен, задаются моделью (1.3).
В соответствии с выше изложенной методикой определим коэффициенты передаточной функции по программе 1 (KP1.BAS – далее KP1), выбрав шаг дискретизации Dt=0,5 и произведя нормировку в соответствии с формулой:
|
получим следующие табличные значения (см. таблицу2 приложения А)
Путем ввода последних (Dt , h(t) и t) в программу KP1, определим коэффициенты передаточной функции:
S1=2,853304; S2=2,95886; S3=1,888241;
В соответствии с этим выбираем передаточную функцию вида (1.1) или:
|

Заключительным этапом построения математической модели объекта является оценка точности аппроксимации. Обычно принимают, что модель адекватна объекту, если разность между ординатами нормированных переходных функций модели и объекта не превышает 0,05¸0,08. Расчет переходной функции модели, имеющей выше приведенную передаточную функцию производят путем численного интегрирования на ЭВМ, описывающей ее системой дифференциальных уравнений по программе (KP2.BAS - далее KP2). Результат расчета переходной функции модели на ЭВМ и сравнение ее с эксперименталной показали, что максимальное расхождение между ними составило 0,06.Что лежит в допустимых пределах £ 0,08.
Расчетная переходная функция модели[2] (см. таблицу3 Приложения А)
Построение АФХ по каналу регулирующего воздействия
 |
|
Далее определяем :
M(w)=|W(jw)| и arg W(jw)=j (для m=0)
и
M(w)=|W(m, jw)| и arg W(m, jw)=j (для m=0,221)
По программе 4 (KP4.BAS - далее KP4[3] ) путем варьирования частоты w получаем ряд значений модуля и фазы для степеней колебательности m=0 и m=0,221 по которым собственно и строятся АФХ (годографы).
При m=0,221 получаем расширенную АФХ
При m=0 - обычную[4]
Настройки регуляторов
Рассматриваемый метод базируется на критерии устойчивости Найквиста, который можно интерпретировать как критерий запаса устойчивости по расположению корней характеристического уравнения, если ввести понятие расширенной амплитудно-фазовой характеристики.
Расширенная амплитудно-фазовая характеристика является частным случаем передаточной функции. Для нее оператор p=-mw±jw, где w - круговая частота; m - степень колебательности (постоянная величина для данной расширенной амплитудно-фазовой характеристики, которая является критерием запаса устойчивости по расположению корней характеристического уравнения замкнутой системы).
|


|

|
|
|
Подобно тому, как обычная АФХ есть отображение на плоскости передаточной функции мнимой оси плоскости комплексного переменного p , расширенная АФХ есть отображение лучей, исходящих из начала координат, в левой полуплоскости под углом arctg m по отношению к положительной и отрицательной полуосям. Эта характеристика может быть получена из передаточной функции подстановкой p=-mw±jw или определена графоаналитическим методом по обычной АФХ.
Собственно расчет оптимальных настроек регуляторов методом расширенных АФХ:
Амплитудно- фазовый критерий устойчивости как критерий запаса устойчивости по РАФХ можно сформулировать: “Если расширенная АФХ устойчивой или нейтральной разомкнутой системы Wpo(m, jw) при изменении w от 0 до ¥ проходит через точку с координатами (-1; j0) не охватывая ее на более высоких частотах, то корни характеристического уравнения замкнутой системы будут расположены в левой полуплоскости на лучах -mw±jw и внутри сектора, ограниченного этими лучами”.
Аналитически это условие записывают в виде:
Wpo(m, jw)= W0(m, jw)Wp(m, jw) = -1; (2.1)
Имея в качестве исходных данных математическую модель объекта, из условия (2.1) можно найти параметры регулятора, обеспечивающего работу системы с заданным запасом устойчивости m=mзад. П-, И-, ПИ-закон регулирования.
Пусть
Wpo(m, jw)= W0(m, jw) Wp(m, jw) (2.2)
где
W0(m, jw)=U+jV (2.3)
-амплитудно-фазовая характеристика объекта по каналу регулирующего воздействия.

-амплитудно-фазовая характеристика ПИ-регулятора. Подставляя (2.2), (2.3), (2.4) в выражение (2.1), получим:

или

из уравнения (2.6) получим систему двух уравнений с тремя неизвестными w, Kp , Kp /Ти :
 (2.7)
(2.7)
Решая систему (2.7) относительно неизвестных (Kp/Ти) и Kp будем иметь:

АФХ объекта удобно представить в следующей форме:
 (2.10)
(2.10)
где А0(m,w) - РАФХ объекта
F0(m,w) - РАЧХ объекта
Из сравнения выражений (2.3) и (2.10) следует, что:
U=A0(m,w) cos F0(m,w)
(2.11)
V= - A0(m,w) sin F0(m,w)
Подставляя эти выражения в формулы (2.8) и (2.9) получим окончательно:
(2.12)
В плоскости параметров настройки ПИ-регулятора (в плоскости с координатами Kp/Ти , Kp) выражения (2.11) и (2.12) описывают параметрическую кривую, которая вместе с прямой (Kp/Ти)=0 ограничивает область заданного запаса устойчивости. Эта область является отображением на плоскости параметров настройки Kp/Ти, Kp сектора в плоскости комплексного переменного p , ограниченного лучами, исходящими из начала координат в левой полуплоскости под углом arctg m. Изменение частоты w, а следовательно, и изменение положения точки на кривой, описываемой уравнениями (2.11) и (2.12), соответствует перемещению пары комплексно сопряженных корней характеристического уравнения по лучам p=- mw ± jw.
Настройки лежащие вне области, ограниченной кривой (2.11), (2.12) и прямой (Kp/Ти)=0, соответствуют корням характеристического уравнения вне сектора, ограниченного лучами p=- mw ± jw , И- и П-регуляторы являются частыми случаями ПИ-регулятора. Настройки их лежат соответственно на оси Kp=0 и (Kp/Ти)=0.
Для И-регулятораиз выражения (2.12) следует, что:
С учетом этого получим:
где w* - частота, для которой выполняется условие:

Для П-регулятораиз выражения (2.11) следует, что:
Sin F0(m,w)=0, т.е.
F0 (m,w)=p
С учетом этого из (2.12) получим:

где w** - частота, для которой выполняется условие:
F(m,w**)=p (2.16)
ПИД-регулятор

Для определения параметров настройки ПИД регулятора из условия (2.1), получим формулы следующего вида:


Пространство параметров настройки регуляторов при этом трехмерное. Задаваясь различными значениями параметра KpTпр строят в плоскости Kp, Kp/Ти кривые равной степени колебательности. Определив оптимальные настройки (Kp/Ти)0 и (Kp)0 для каждого значения KpTпр, выбирают лучшую из них.
Оптимальные настроечные параметры регуляторов находятся из условия минимума интегрального квадратичного критерия качества:

Согласно которому определяется wр=1,2w0, соответствующая т. А на кривой m=mзад. П- и И-регуляторы являются частными случаями ПИ-регулятора. Настройку П-регулятора определяют при S0=0, а настройку И-регулятора - при S1=0 на кривой m=mзад.
Оптимальная настройка ПИД регулятора, соответствующая min критерию качества имеет вид:
В соответствии с выше изложенной методикой, по программе KP4 производят расчет настроек регуляторов.
Исходными данными для программы KP4 являются:
Коэффициент передачи (расчетный) K=10,(3)
Коэффициенты передаточной функции: A1=2,853304; A2=2,95886; A3=1,888241;
Степень колебательности: m=0,221
Результатом работы программы будет задаваемый интервал изменения частоты w с задаваемым шагом дискретизации на основе которых строятся границы области устойчивости и границы области заданного запаса устойчивости по критерию m=0,221. А также соответствующей этой частоте модуль, фаза, настройки S0, S1.
По табличным данным приложения 2, строим график зависимости S0(S1), по этому графику определяем w0 соответствующей max S0, далее определяем wp=1,2w0 и соответствующей этой частоте настройки S0опт и S1опт - это и будут настройки ПИ-регулятора S0опт=0,0477425556239856; S1опт=0,08318245. Настройки же П-регулятора определяются при S0=0; S1=0,1140846;Настройки И-регулятора при S1=0;S0=0,0430441633020633;
Для определения настроек ПИД-регулятора, рассчитываем настройку S2 регулятора из условий:
· 
· 
· 
где
 - время изодрома;
- время изодрома;
 - время предварения;
- время предварения;
Далее подставив в ту же программу значения S2x строим зависимость S0(S1) и определяем настройки ПИД-регулятора, аналогично тому как мы это делали для ПИ-регулятора.
| S01=0,04774255; | S02=0,04670523; | S03=0,04699792; |
| S11=0,08318245; | S12=0,08559623; | S13=0,08574484; |
| S21=0,00079426; | S22=0,00119934; | S23=0,00201491; |
Итак настройки всех регуляторов:
| S0 | S1 | S2 | |
| ПИ | 0,04774255 | 0,08318245 | - |
| ПИД1 | 0,04774255 | 0,08318245 | 0,00079426 |
| ПИД2 | 0,04670523 | 0,08559623 | 0,00119934 |
| ПИД3 | 0,04699792 | 0,08574484 | 0,00201491 |
Переходные процессы
Системы автоматического регулирования (САР), работающие с замкнутой цепью воздействия в общем виде могут рассматриваться, состоящими из двух взаимно воздействующих частей - объекта регулирования и автоматического регулятора.
Предположим, что при отсутствии изменения возмущений и изменения управляющих воздействий или спустя некоторое время после прекращения их действия, на время выведшего систему из равновесия, система автоматического регулирования находится в состоянии равновесия, т.е. регулируемый параметр объекта регулирования, имеет в пределах допустимой точности не меняющееся со временем заданное значение. При появлении какого-либо возмущения или изменении управляющего воздействия система регулирования приходит в движение. При этом так называемая устойчивая система при установившихся значениях управляющих и возмущающих воздействий, спустя некоторое время, вновь приходит к установившемуся состоянию равновесия, а неустойчивая система, прийдя в движение, не приходит к установившемуся состоянию равновесия, а отклонение ее от состояния равновесия будет либо все время увеличиваться, либо непрерывно изменяться в форме постоянных незатухающих колебаний.
Условие устойчивости системы состоит в том, что абсолютная величина отклонения регулируемого параметра от заданного значения по истечении достаточно большого времени должна стать меньше наперед заданного значения.
Процесс перехода системы от одного состояния равновесия в другое состояние равновесия называется переходным процессом.
При этом качество переходного процесса в устойчивой системе при прочих равных условиях будет тем выше, чем быстрее протекает переходный процесс и чем меньше за время его протекания изменяющиеся значения регулируемого параметра отклоняются от тех их постоянных значений, которые соответствуют новому установившемуся состоянию равновесия.
При рассмотрении характера переходных процессов обычно пользуются безразмерными значениями анализируемых величин. Для этого текущие абсолютные отклонения величин относят к каким-либо постоянным их значениям, характерным для данной системы. Обычно это бывают либо номинальные, либо максимальные значения.
Передаточная функция системы по каналу регулирования:
 |
Wp(p) - зависит от выбранного регулятора

W0(p) - передаточная функция объекта по каналу регулирования
 - - передаточная функция объекта по каналу возмущения.
- - передаточная функция объекта по каналу возмущения.
(В данном случае =0)
Передаточная функция системы:
Отсюда переходная функция:

где Wp(p)- передаточная функция регулятора;
Для П-регулятора Wp(p)=Kp=S1;
Для И-регулятора Wp(p)=  =
= 
Для ПИ-регулятора Wp(p)= 
Для ПИД-регулятора Wp(p)= 
где KpTд = S2 - настройка дифференциального регулятора.
Передаточная функция системы по каналу возмущения:
 |
Передаточная функция системы в этом случае:
Здесь - передаточная функция объекта по каналу возмущения:
Переходная функция в этом случае:

Для табуляции значений h(t) и t переходных процессов по каналу регулирования и возмущения используется программа (KP5.BAS - далее KP5).
Исходными данными для этой программы являются:
· расчетный коэффициент передачи  ;
;
· a1, a2, a3 - коэффициенты передаточной функции;
· K2 - коэффициент передачи передаточной ф-ции объекта по каналу возм.;
· a4=T;
· S0, S1, S2 - настройки соответствующих регуляторов;
· V1 - задающее воздействие;
· f3 - возмущающее воздействие;
· n=5 - число уравнений;
· h - шаг интегрирования;
· w1 - шаг печати;
· w2 - конечное значение времени;
|
из
5.00
|
Обсуждение в статье: Построение АФХ по каналу регулирующего воздействия |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы