 |
Главная |


Параметры получены в LinReg
|
из
5.00
|
Синтезированная САР с непрерывным и цифровым регуляторами была смоделирована в среде MATLAB (пакет Simulink). Модель системы управления для непрерывного объекта управления (Кп=7,617; Кп /Ти = 0,425) и дискретного объекта управления (Кп=5,873; Кр /Ти = 0,32; Ткв=4) представлена на рисунке 9:

Рисунок 9 Модель системы управления (значения Кп и Ти, полученные в LinReg)
Описание модели Simulink:
Transfer Function – передаточная функция объекта регулирования без запаздывания:

Transport Delay – звено транспортного запаздывания (t = 4).
Gain – усилительные звенья в пропорциональной и интегрирующей частях непрерывного и дискретного регуляторов (значения коэффициентов усиления равны соответственно Kп и Kп/Tи).
Integrator – интегратор непрерывный.
Discrete-Time Integrator – интегратор дискретного времени (sample time = 4).
Zero Order Hold (ZOH) – фиксатор нулевого порядка (sample time = 4).
Constant – константа, значение которой равно  и константа
и константа  .
.
Step (Zadanie) – ступенчатая функция, определяющая величину задающего воздействия (  ).
).
Step (Vozm)–ступенчатая функция, определяющая величину сигнала внутреннего возмущения(  ).
).
Saturate – нелинейный элемент-ограничитель (upper limit=59, lower limit=-41).
Sum – сумматор.
Mux – мультиплексор.
Scope – осциллоскоп, который предназначен для отображения зависимости регулируемой величины и сигнала с регулятора от времени.
Синтезированная САР с непрерывным и цифровым регуляторами была смоделирована в среде MATLAB (пакет Simulink). Модель системы управления для непрерывного объекта управления (Кп=8,4; Кп /Ти = 0,467) и дискретного объекта управления (Кп=7,617; Кр /Ти =0,425; Ткв=0,5) (по расчетным данным) представлена на рисунке 10:

Рисунок 10 Модель системы управления (Расчетные данные)
Графики работы системы при отработке задания и внутреннего возмущения представлены в приложении:
· Выход системы при отработке задания – Рисунок 11
· Выход с ПИ – регулятора при отработке задания – Рисунок 12
· Выход системы при отработке внутреннего возмущения – Рисунок 13
· Выход с ПИ – регулятора при отработке внутреннего возмущения – Рисунок 14
Параметры, характеризующие качество работы моделированной САР с непрерывным и цифровым регулятором при отработке задания и внутреннего возмущения, приведены в
Таблице 10.
Графики работы системы при отработке задания и внутреннего возмущения представлены в приложении:
· Выход системы при отработке задания – Рисунок 15
· Выход с ПИ – регулятора при отработке задания – Рисунок 16
· Выход системы при отработке внутреннего возмущения – Рисунок 17
· Выход с ПИ – регулятора при отработке внутреннего возмущения – Рисунок 18
Параметры, характеризующие качество работы моделированной САР с непрерывным и цифровым регулятором при отработке задания и внутреннего возмущения, приведены в
таблице 11.
Таблица 10.(по Linreg)
| Параметр | При отработке задания | При отработке внутреннего возмущения | ||
| Непрерывный регулятор | Цифровой регулятор | Непрерывный регулятор | Цифровой регулятор | |
| Максимальный выброс регулируемой величины | ||||
| Степень затухания | ||||
| Время регулирования |
Таблица 11.(Расчетные данные)
| Параметр | При отработке задания | При отработке внутреннего возмущения | ||
| Непрерывный регулятор | Цифровой регулятор | Непрерывный регулятор | Цифровой регулятор | |
| Максимальный выброс регулируемой величины | ||||
| Степень затухания | ||||
| Время регулирования |
Степень затухания:
 , где А1 и А2 – первая и вторая амплитуды на графике.
, где А1 и А2 – первая и вторая амплитуды на графике.
Максимальный выброс регулируемой величины:

Вывод
В данной курсовой работе были решена задача параметрического синтеза системы стабилизации разряжения в топке котельного агрегата.
Для этого:
1. Определен период квантования Ткв=4;
2. Получена Z – передаточная функция ОУ;
3. Получено разностное уравнение ОУ и построены временные характеристики в аналоговой и дискретной форме;
4. Построены КЧХ для непрерывного и дискретного ОУ;
5. Рассчитаны оптимальные параметры настройки непрерывного и цифрового ПИ-регулятора. Модель системы управления для непрерывного объекта управления (Кп=8,4; Ти=18; Кп /Ти = 0,467- расчетные и Кп=7,617; Ти=17,902; Кп /Ти = 0,425 – по LinReg) и для дискретного объекта(Кп=5,873; Ти=18,359; Кп /Ти = 0,32; Tкв=4– по LinReg и Кп=7,617; Ти=17,902; Кп /Ти = 0,425; Ткв=0,5 – метод подбора(linreg));
6. По этим параметрам и заданным условиям в среде MATLAB была смоделирована система управления.
В ходе выполнения курсовой работы были приобретены навыки работы в средах Linreg и MATLAB+Simulink.
Список литературы
1. Ротач В.Я. Теория автоматического управления теплоэнергитическими процессами: Учебник для вузов. – М.: Энергоиздат, 1985.
2. Дьяконов В.П. MATLAB 6/6.1/6.5 + Simulink 4/5 в математике и моделировании: Полное руководство пользователя. – М.: СОЛОН-Пресс. 2003. – 576 с. ил.
Приложение
Таблица 1. Значения временных характеристик непрерывного и дискретного объектов.
| t | Непрерывный объект h(t-τ) | Дискретный объект h[kT] |
| 0,011091 | 0,0108 | |
| 0,035614 | 0,0351 | |
| 0,065323 | 0,064687 | |
| 0,095709 | 0,095042 | |
| 0,124448 | 0,123815 | |
| 0,150472 | 0,149913 | |
| 0,17342 | 0,172952 | |
| 0,19331 | 0,192937 | |
| 0,210352 | 0,210069 | |
| 0,224838 | 0,224634 | |
| 0,237083 | 0,236947 | |
| 0,247394 | 0,247312 | |
| 0,256051 | 0,256013 | |
| 0,263306 | 0,263301 | |
| 0,269376 | 0,269396 | |
| 0,274451 | 0,274488 | |
| 0,278689 | 0,278737 | |
| 0,282227 | 0,282283 | |
| 0,28518 | 0,285239 | |
| 0,287643 | 0,287703 | |
| 0,289697 | 0,289757 | |
| 0,291411 | 0,291468 | |
| 0,292839 | 0,292893 | |
| 0,29403 | 0,294081 |
Таблица 2. Значения КЧХ непрерывного объекта.
| w | re | im |
| 0,3 | ||
| 0,01 | 0,275692 | -0,0964 |
| 0,02 | 0,215335 | -0,16478 |
| 0,03 | 0,143808 | -0,19646 |
| 0,04 | 0,07945 | -0,19924 |
| 0,05 | 0,029353 | -0,18505 |
| 0,06 | -0,0064 | -0,16319 |
| 0,07 | -0,03035 | -0,13928 |
| 0,08 | -0,04544 | -0,11626 |
| 0,09 | -0,05419 | -0,09545 |
| 0,1 | -0,05852 | -0,07728 |
| 0,11 | -0,05986 | -0,06176 |
| 0,12 | -0,05923 | -0,04867 |
| 0,13 | -0,05732 | -0,03773 |
| 0,14 | -0,05465 | -0,02865 |
| 0,15 | -0,05154 | -0,02112 |
| 0,16 | -0,04822 | -0,01492 |
| 0,17 | -0,04485 | -0,00981 |
| 0,18 | -0,04152 | -0,00561 |
| 0,19 | -0,0383 | -0,00218 |
| 0,2 | -0,03523 | 0,000632 |
| 0,21 | -0,03233 | 0,002915 |
| 0,22 | -0,02961 | 0,004764 |
| 0,23 | -0,02706 | 0,006252 |
| 0,24 | -0,02469 | 0,00744 |
| 0,25 | -0,02249 | 0,008376 |
| 0,26 | -0,02045 | 0,009103 |
| 0,27 | -0,01856 | 0,009655 |
| 0,28 | -0,01682 | 0,010062 |
| 0,29 | -0,0152 | 0,010346 |
| 0,3 | -0,01371 | 0,010527 |
| 0,31 | -0,01233 | 0,010623 |
| 0,32 | -0,01106 | 0,010648 |
| 0,33 | -0,00988 | 0,010612 |
| 0,34 | -0,0088 | 0,010527 |
| 0,35 | -0,00779 | 0,0104 |
| 0,36 | -0,00686 | 0,010239 |
| 0,37 | -0,00601 | 0,010049 |
| 0,38 | -0,00522 | 0,009836 |
| 0,39 | -0,00449 | 0,009604 |
| 0,4 | -0,00381 | 0,009357 |
| 0,41 | -0,00319 | 0,009098 |
| 0,42 | -0,00261 | 0,008829 |
| 0,43 | -0,00208 | 0,008553 |
| 0,44 | -0,0016 | 0,008272 |
| 0,45 | -0,00115 | 0,007988 |
| 0,46 | -0,00073 | 0,007701 |
| 0,47 | -0,00035 | 0,007414 |
| 0,48 | 2,13E-07 | 0,007128 |
| 0,49 | 0,000321 | 0,006842 |
| 0,5 | 0,000615 | 0,006559 |
Таблица 3. Значения КЧХ дискретного объекта.
| w | re | im |
| 0,3 | ||
| 0,01 | 0,273735 | -0,10192 |
| 0,02 | 0,208578 | -0,17339 |
| 0,03 | 0,131617 | -0,20494 |
| 0,04 | 0,062908 | -0,2051 |
| 0,05 | 0,010216 | -0,187 |
| 0,06 | -0,02643 | -0,16093 |
| 0,07 | -0,04994 | -0,13311 |
| 0,08 | -0,06366 | -0,10677 |
| 0,09 | -0,07045 | -0,08333 |
| 0,1 | -0,07252 | -0,0632 |
| 0,11 | -0,07149 | -0,04631 |
| 0,12 | -0,0685 | -0,03238 |
| 0,13 | -0,06433 | -0,02101 |
| 0,14 | -0,05953 | -0,01184 |
| 0,15 | -0,05447 | -0,00451 |
| 0,16 | -0,04938 | 0,0013 |
| 0,17 | -0,04443 | 0,005847 |
| 0,18 | -0,03969 | 0,009361 |
| 0,19 | -0,03523 | 0,012027 |
| 0,2 | -0,03108 | 0,014002 |
| 0,21 | -0,02723 | 0,015414 |
| 0,22 | -0,02371 | 0,016367 |
| 0,23 | -0,02048 | 0,016948 |
| 0,24 | -0,01754 | 0,017229 |
| 0,25 | -0,01487 | 0,017266 |
| 0,26 | -0,01246 | 0,017109 |
| 0,27 | -0,01028 | 0,016797 |
| 0,28 | -0,00831 | 0,016363 |
| 0,29 | -0,00655 | 0,015833 |
| 0,3 | -0,00498 | 0,015229 |
| 0,31 | -0,00357 | 0,014571 |
| 0,32 | -0,00233 | 0,013874 |
| 0,33 | -0,00122 | 0,01315 |
| 0,34 | -0,00025 | 0,01241 |
| 0,35 | 0,000605 | 0,011663 |
| 0,36 | 0,001348 | 0,010916 |
| 0,37 | 0,001991 | 0,010175 |
| 0,38 | 0,002542 | 0,009445 |
| 0,39 | 0,003008 | 0,00873 |
| 0,4 | 0,003399 | 0,008034 |
| 0,41 | 0,003719 | 0,00736 |
| 0,42 | 0,003976 | 0,006709 |
| 0,43 | 0,004176 | 0,006084 |
| 0,44 | 0,004324 | 0,005486 |
| 0,45 | 0,004424 | 0,004915 |
| 0,46 | 0,004482 | 0,004374 |
| 0,47 | 0,004502 | 0,003862 |
| 0,48 | 0,004489 | 0,00338 |
| 0,49 | 0,004445 | 0,002927 |
| 0,5 | 0,004374 | 0,002504 |

Рисунок 11 – Выход системы при отработке задания. (Linreg)
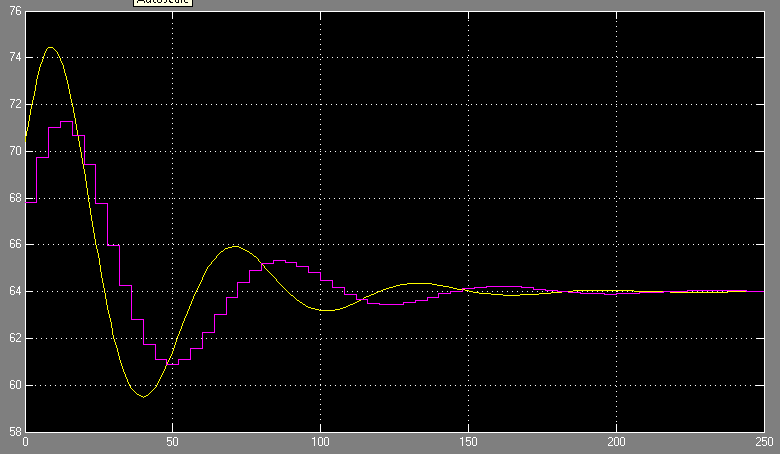
Рисунок 12 – Выход с ПИ – регулятора при отработке задания. (Linreg)

Рисунок 13 – Выход системы при отработке внутреннего возмущения. (Linreg)

Рисунок 14 – Выход с ПИ – регулятора при отработке внутреннего возмущения.(Linreg)
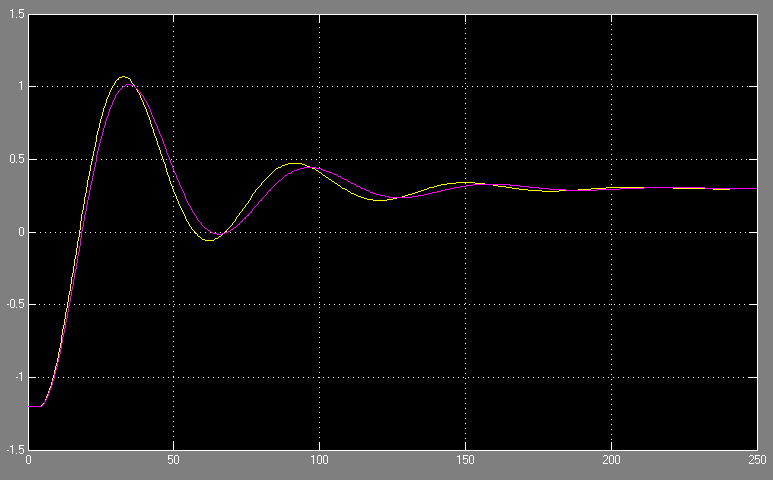
Рисунок 15 – Выход системы при отработке задания. (Расчетные данные)
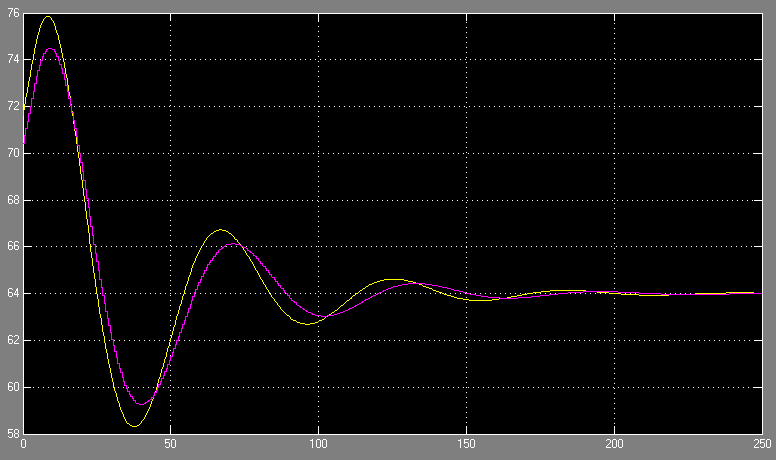
Рисунок 16 – Выход с ПИ – регулятора при отработке задания. (Расчетные данные)

Рисунок 17 – Выход системы при отработке внутреннего возмущения. (Расчетные данные)
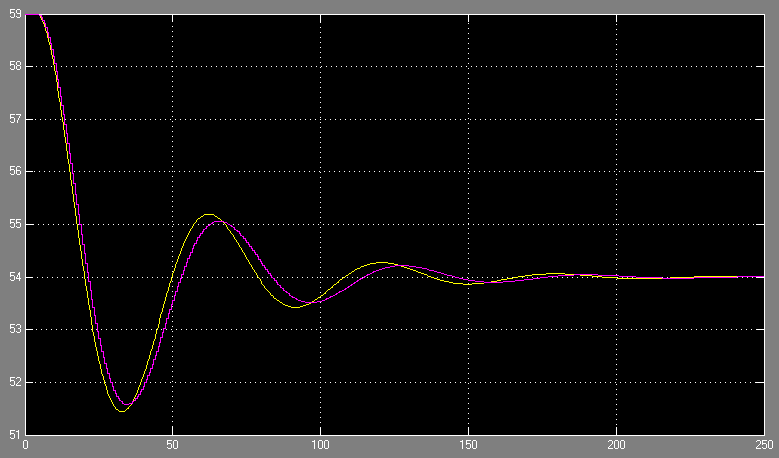
Рисунок 18 – Выход с ПИ – регулятора при отработке внутреннего возмущения.(Расчетные данные)
|
из
5.00
|
Обсуждение в статье: Параметры получены в LinReg |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы