 |
Главная |


АЧХ замкнутой САР по возмущающему воздействию
|
из
5.00
|
Часть 1: Корневые критерии качества
Цель работы:исследование линейной системы автоматического регулирования с ПИ - регулятором по корневым критериям качества (степени колебательности).
 Структурная схема системы регулирования
Структурная схема системы регулирования
Дано:
k1 – коэффициент усиления пропорциональной части;
k0 – коэффициент усиления интегральной части;
ky – коэффициент усиления объекта.
m1=0.25;m2=0.35
ky=2,0; T0=1.4;
Передаточная  функция разомкнутой системы:
функция разомкнутой системы:

Передаточная функция замкнутой системы:

Характеристическое уравнение замкнутой системы:

Сделав замену  , где
, где  , запишем смещенное уравнение:
, запишем смещенное уравнение:
 ;
;
 Подставим в уравнение
Подставим в уравнение  и
и  , получим уравнение границы Д-разбиения
, получим уравнение границы Д-разбиения 
Приравнивая к нулю вещественную и мнимую части уравнения, получим систему с двумя неизвестными:

Решим систему с помощью определителей:

 ;
;




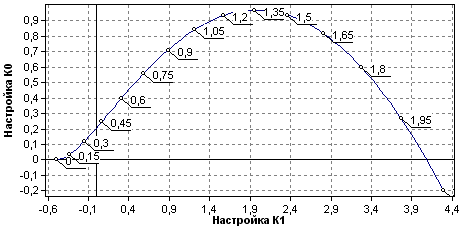
1. Найдем уравнение границы области устойчивости:
Для 


Для 


Для 


Определим значения параметров настройки  и
и  для И, П и ПИ-регуляторов.
для И, П и ПИ-регуляторов.
а) для И – регулятора:
 ;
;  ;
;  ;
;

 ; ;
; ;
б) для П – регулятора:
 ;
;  ;
;  ;
;

 ; ;
; ;

в) для ПИ – регулятора(значение  находится из условия
находится из условия  ):
):
 ;
;

 ;
;


Параметры И – регулятора:
1. 
Частота затухания основной гармоники:

Постоянная времени объекта:

Время регулирования:

Степень затухания:

2.  ;
; 

Параметры П – регулятора:
1. 

2. ; 

Параметры ПИ – регулятора:
1. 

2. ; 

Определим статическую ошибку для П-регулятора:


1. 
При 
Статическая ошибка
 ;
;
2. 
При
Статическая ошибка

Определим переходные функции по задающему воздействию для И, П и ПИ – регуляторов.
И-регулятор:






 ;
;




 ;
;

П – регулятор:










ПИ-регулятор:









Переходной процесс правее точки ПИ-регулятора:










Прямые показатели качества переходных процессов
| Регулятор | Прямые показатели качества переходного процесса | ||||
| Время ПП, tп.п. | Перерегулирование, σ % | Колебательность, μ | Степень затухания, ψ | ||
| И | m1 | 23,2 | 42,5 | 0.794 | |
| m2 | 19,3 | 31,25 | 2,86 | 0.88 | |
| П | m1 | 3,7 | 45.7 | 0.79 | |
| m2 | 3,8 | 31,8 | 2,86 | 0.89 | |
| ПИ | m1 | 5,6 | 44,25 | 0.79 | |
| m2 | 5,5 | 2,86 | 0.89 | ||
| Пр. | m1 | 4,9 | 42,75 | 0.795 | |
| m2 | 4,6 | 23,75 | 2,86 |
Перерегулирование 
Колебательность μ=β/α=1/m;
Степень затухания 
Определим переходные функции по возмущающему воздействию для И, П и ПИ – регуляторов.





f = 10В

И-регулятор:

m1=0.25; k0=0.272; ky=2;


m2=0.35; kУ=2; k0=0,21;


П-регулятор:

m1=0.25; kУ=2; k1=8;


m2=0.35; kУ=2; k1=4;


ПИ-регулятор:

m1=0.25, kУ=2; k0=1,8; k1=3,7;


m2=0.35; kУ=2; k0=0,96; k1=1,96;


Переходной процесс правее точки ПИ-регулятора:
m=0.25; k1=4.165; k0=1.72; l=2.2;


m=0.35; k1=3.2; k0=0.6; l=1.9;

Переходной процесс без регулятора:

| Регулятор | Прямые показатели качества переходного процесса | ||||
| Время ПП, tп.п. | Коэффициент динамического регулирования ηР | Число колебаний за время ПП К | Степень затухания, ψ | ||
| И | m1 | 26,2 | 1,77 | 0,788 | |
| m2 | 22,3 | 1,88 | 0.88 | ||
| П | m1 | 3,6 | 0,25 | 0.769 | |
| m2 | 4,29 | 0,45 | 0.799 | ||
| ПИ | m1 | 5,9 | 0,41 | 0.795 | |
| m2 | 7,74 | 0,63 | 0,890 | ||
| Пр. | m1 | 8,1 | 0,38 | 0,753 | |
| m2 | 0,49 | 0,575 |
ηР=hmax/(kв.f0); где kв.f0 – установившееся отклонение регулируемой величины в АСР при отключенном регуляторе.
АЧХ замкнутой САР.






И-регулятор:
m1=0.25; k0=0.272;



m2=0.35, k0=0.147


П-регулятор:
m1=0.25; k1=8;


m2=0.35; k1=4;


ПИ-регулятор:
m1=0.25; k0=1.8; k1=3.7;

 m2=0.35, k0=0.823, k1=2.418
m2=0.35, k0=0.823, k1=2.418


АЧХ правее точки ПИ-регулятора:
m1=0.25; k0=1.72; k1=4.165;


m2=0.35; k0=0.823; k1=2.418;

 Оценки качества переходного процесса по АЧХ замкнутой САР
Оценки качества переходного процесса по АЧХ замкнутой САР
| Регулятор | параметры | ||||||||
| A3(0) | A3(ωp) | M | tm | tp | ωр | ωпр | ωc | ||
| И | m=0.25 | 6,98 | 27,9 | 0,45 | 0,615 | 0,684 | |||
| m=0.35 | 1,54 | 1,54 | 8,26 | 0,38 | 0,519 | 0,592 | |||
| П | m=0.25 | 0,94 | 2,13 | 1,14 | 4,5 | 2,76 | 3,9 | 4,38 | |
| m=0.35 | 0,89 | 1,41 | 1,58 | 1,66 | 6,6 | 1,89 | 2,67 | 3,06 | |
| ПИ | m=0.25 | 2,1 | 2,1 | 1,71 | 6,8 | 1,84 | 2,58 | 2,9 | |
| m=0.35 | 1,55 | 1,55 | 2,79 | 1,26 | 1,76 | 2,1 | |||
| ПИ справа | m=0.25 | 2,05 | 2,05 | 1,61 | 6,4 | 1,95 | 2,73 | 3,08 | |
| m=0.35 | 1,46 | 1,46 | 1,89 | 7,6 | 1,66 | 2,26 | 2,61 |
М - относительный максимум АЧХ, показатель колебательности, определяющий колебательность, M=Аз.max(ω)/Аз(0).
tм - время первого максимума переходного процесса, tм=π/ωр.
ωр - частота резонансного пика АЧХ.
ωс - частота среза, A(ωc)= А(0)/√2
ωпр - полоса пропускания, A(ωпр)= А(0)
tр – время регулирования, tр = 4π/ωр.
АЧХ замкнутой САР по возмущающему воздействию
 ;
;
 ;
;

И-регулятор:
m1=0.25; K0=0.272; Kу=2;


m1=0.35; K0=0.21; Kу=2;


П-регулятор:
m1=0.25; K1=8; Kу=2;


m2=0.35; K1=4; Kу=2;


ПИ-регулятор:
m1=0.25, kУ=2; k0=1,8; k1=3,7;


m1=0.35, kУ=2; k0=0,96; k1=1,96;


АЧХ правее точки ПИ-регулятора:
m1=0.25, kУ=2; k0=1,72; k1=4,165;


m1=0.35, kУ=2; k0=0,6; k1=3,2;


|
из
5.00
|
Обсуждение в статье: АЧХ замкнутой САР по возмущающему воздействию |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы