 |
Главная |


Структурный анализ механизма
|
из
5.00
|
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ «МИСиС»
 |
ИНСТИТУТ ЭКОТЕХНОЛОГИЙ И ИНЖИНИРИНГА
КАФЕДРА ИНЖИНИРИНГА ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ
НАПРАВЛЕНИЕ________________________ ГРУППА____________________
КУРСОВАЯ РАБОТА
По курсу___________________________
Тема:_____
___________
___________
_______
Студент__
(ФИО) (подпись)
Руководитель _____________________________
(ФИО) (подпись)
Оценка выполнения курсовой работы ___________________________
Дата сдачи курсовой работы__
Зарегистрировано на каф. ИТО_______________
(дата) (подпись)
Москва 20___/20___учебный год
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ «МИСиС»
Институт экотехнологий и инжиниринга
Кафедра инжиниринга технологического оборудования
ЗАДАНИЕ
На выполнение курсовой работы
| По курсу |
Студенту группы _____
(ФИО полностью)
1. Тема _____________
___________________________
___________________________
2. Исходные данные_
___________________________
___________________________
___________________________
___________________________
3. Перечень подлежащих разработке вопросов:
3.1. Основные этапы работы _______________________
___________________________
___________________________
___________________________
___________________________
___________________________
___________________________
___________________________
___________________________
4. Сроки начала и окончания проектирования__________
5. Задание выдано___
6. Руководитель КР__
7.
|
Кинематический анализ кривошипно-ползунного механизма
Целью геометрического синтеза любого механизма является определение длин всех его звеньев или проектирование кинематической схемы механизма.
Синтез механизма выполняется в следующей последовательности:
1.1. Структурный анализ. Разбиение механизма на структурные группы и начальное звено, образующее кинематическую пару со стойкой.
1.2. Построение плана положений механизма.
1.3. Построение планов скоростей механизма.
1.4. Построение планов ускорений механизма.
Исходные данные
Кинематическая схема исследуемого механизма изображена на рисунке 1.1.
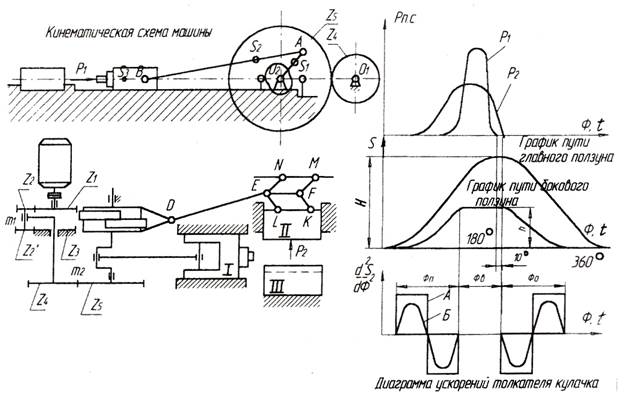
Рис. 1.1. Горизонтально-ковочная машина
В качестве начального звена примем кривошип 1. Точка S1 является центром масс кривошипа 1. Точка S2 является центром масс шатуна 2. Начальное звено 1 вращается с постоянной угловой скоростью ω1 = 1 рад/с. Ход ползуна 3 Н = … м. Отношение длин звеньев 
Массы звеньев: m1 = … кг, m2 = … кг, m3 = … кг. Центральный момент инерции шатуна JS2 = 0,45 кг∙м2. На ползун 3 действует сила полезного сопротивления PПС = 2000 Н.
Для центрального кривошипно-ползунного механизма двойной ход ползуна (поршня), соответствующий одному обороту кривошипа, равен четырем длинам кривошипа 2H = 4l1.
Следовательно длина кривошипа 1


Из соотношения длин звеньев определим длину шатуна 2


Структурный анализ механизма
Определим число степеней свободы механизма по формуле П.Л. Чебышева:
W = 3n - 2p5 – p4 = 3 ∙ 3 - 2 ∙ 4 - 0 = 1,
где n = 3 - число подвижных звеньев;
p5 = 4 - число одноподвижных кинематических пар (0-1, 1-2, 2-3, 3-0);
p4 = 0 - число двухподвижных кинематических пар.
Таким образом, механизм имеет одну степень свободы и одно ведущее звено, которым является звено 1.
После выделения из механизма ведущего звена 1 со стойкой, оставшаяся кинематическая цепь, содержащая звенья 2 и 3, является структурной группой Ассура, которая относится ко второму классу и второму виду. Механизм в целом, следовательно, относится ко второму классу.
План положений механизма
Примем длину отрезка ОА, изображающего на чертеже звено 1, равной
… мм. Тогда масштабный коэффициент для построения плана положения механизма будет следующим:

Определим длины отрезков, изображающих остальные звенья механизма на чертеже:
В программе AutoCAD обозначим координатные оси xy, на пересечении которых фиксируем неподвижную опору О. Построение плана положений начинаем с первое (начального) положения звена ОА, расположенного под углом 90 °к оси y, после чего строим положение отрезка АВ, изображающего звено 2 в первом положении механизма. С помощью команды «МАССИВ» покажем 12 положений механизма (Лист 1).
План скоростей механизма
Определим скорость точки А звена ОА
vA = ω1 . lOA, VA ┴ OA
vA = м/с
Вектор скорости vA направлен перпендикулярно кривошипу ОА в направлении его вращения.
На плане скоростей этому уравнению соответствует вектор pa, длину которого принимаем равной ….. мм. Тогда масштабный коэффициент для построения плана скоростей будет следующим:

Изобразим на чертеже вектор pa, направленный перпендикулярно отрезку ОА, учитывая направление вращения звена 1. Точка p является полюсом плана скоростей. Поместим в полюс р точку, соответствующую неподвижной точке О механизма.
Для нахождения скорости точки В составим векторное уравнение:
vB = vA + vBA,
где vA - скорость точки А в поступательном движении звена 2 (направлена перпендикулярно ОА с учётом направления вращения звена 1),
vBA - скорость точки В при относительном вращении звена 2 вокруг точки А (направлена перпендикулярно АВ).
Решим это векторное уравнение графически, выполнив на чертеже следующие построения. Проведём через точку а прямую линию перпендикулярную АВ и через полюс p – прямую параллельную оси х . Точка пересечения b этихпрямых даст конец вектора рb , изображающего скорость vB. Строим планы скоростей для 12ти положений кривошипа (рис. 1.2).
Точки S1 и S2, принадлежащие звеньям 1 и 2, делят длину звеньев на отрезки в пропорции: AS1/АO = 1/3; AS2/АB = 1/3.
На плане скоростей также делим векторы pa и ab в этой же пропорции:
as1/ap = 1/3; as2/ab = 1/3.
Для получения векторов скоростей точек S1 и S2 соединим на плане полюс p с точками S1 и S2 . Проекции этих векторов на ось y - ps1y и ps2y.
Снимаем с плана скоростей:
VB = pb . µv, м/с;
VBA = ab . µv, м/с; ω2 = VBA/lAB, р/с;
VS1 = ps1 . µv, м/с; VS2 = ps2 .µv, м/с;
VS1y = ps1 . µv, м/с; VS2y = ps2 . µv, м/с;
Полученные результаты заносим в таблицу 1.1.
Таблица 1.1.
| Положение Параметр | ||||||||||||
| vB, м/с | ||||||||||||
| vBA, м/с | ||||||||||||
| ω2, р/с | ||||||||||||
| vS1, м/с | ||||||||||||
| vS2, м/с | ||||||||||||
| vS1y = vS2y , м/с |
План ускорений механизма
На листе 2 строим план 5-го положения механизма.
Определим ускорение точки А.
Уравнения для определения ускорения точки А звена ОА
aA = anA + aτA, ,
где anA и aτA - нормальная и тангенциальная составляющие;
так как ε1 = 0 и aτA = 0
aA = anA = ω21 . lOA = ω21 . l1
aA = м/с2.
Для построения плана ускорений выберем полюс плана ускорений и обозначим точкой π.
Примем длину вектора πа, изображающего на чертеже ускорение точки А, равной ……. мм. Тогда масштабный коэффициент для построения плана ускорений будет следующим.

Изобразим на листе 2 векторπа, направленный параллельно ОА (при этом учитывая, что вектор πа направлен от точки А к точке О).
Для определения ускорения точки B составим уравнение
aB = aA + anBA + aτBA.
Значение нормальной составляющей относительного ускорения определим по формуле


Расчет  выполнен для 5-го положения кривошипно-ползунного механизма. Вектор направлен // шатуну АВ от точки В к точке А (к центру вращения). На плане ускорений из точки a, с учетом масштабного коэффициента
выполнен для 5-го положения кривошипно-ползунного механизма. Вектор направлен // шатуну АВ от точки В к точке А (к центру вращения). На плане ускорений из точки a, с учетом масштабного коэффициента  , откладываем вектор ab’
, откладываем вектор ab’
На плане ускорений построим вектор 3, соответствующий тангенциальной составляющей  , который будет проходить через конец вектора
, который будет проходить через конец вектора  , перпендикулярно .
, перпендикулярно .
Из полюса π построим вектор 4 параллельный оси х, соответствующий направлению ускорения точки B, принадлежащей ползуну 3.
Пересечение векторов 3 и 4 в точке b определит величину aB и .
Соединим точки а и b - получим полное относительное ускорение aBA.
На плане ускорений обозначим точки S1 и S2, для чего также разделим векторы πa и ab в пропорции:
aS1/πa = 1/3; aS2/ab = 1/3.
Для получения векторов ускорений точек S1 и S2 соединим на плане полюс π с точками S1 и S2 .
Снимаем с плана ускорений:
aB = πb . µa, м/с2; aBA = ab . µa, м/с2;
aB = м/с2; aBA = м/с2;
aτBA = bb’ . µa, м/с2; ε 2 = aτBA/lAB, р/с2;
aτBA = м/с2; ε 2 = р/с2;
aS1 = πS1 . µa, м/с2; aS2 = πS2 . µa, м/с2.
aS1 = м/с2; aS2 = м/с2.
|
из
5.00
|
Обсуждение в статье: Структурный анализ механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы