 |
Главная |


Построение графика силового баланса автомобиля
|
из
5.00
|
Федеральное государственное бюджетное
Образовательное учреждение высшего
Профессионального образования
Липецкий государственный технический университет
Кафедра управления автотранспортом
РАСЧЕТНО-ГРАФИЧЕСКОЕЗАДАНИЕ
По конструкции и эксплуатационным свойствам ТИТТМО
Шкода Октавиа
Студент __________ Крюков М.В.
подпись, дата
Группа А-13-2
Преподаватель
профессор ___________ Сорокин В.И.
подпись, дата
Липецк 2014 г.
Содержание
1. Построение внешней скоростной характеристики двигателя внутреннего сгорания.
2. Построение силового баланса.
2.1. Определение тяговой силы.
2.2. Определение силы лобового сопротивления воздуха.
2.3. Определение силы дорожного сопротивления.
3. Построение динамической характеристики.
4. Построение графика ускорения.
5. Построение разгонной характеристики.
6. Построение топливной характеристики.
Построение внешней скоростной характеристики двигателя внутреннего сгорания.
В настоящее время на автомобилях применяются двигатели внутреннего сгорания. Их мощностные свойства принято оценивать скоростными характеристиками, представляющими зависимость эффективной мощности или крутящего момента на коленчатом валу при установившемся режиме работы от частоты работы вращения коленчатого вала двигателя. Скоростная характеристика, полученная при полной подаче топлива называется внешней скоростной характеристикой.
Исходные данные для расчета эксплуатационных характеристик автомобиля приведены в таблице 1:
Таблица 1. Исходные данные
| № п/п | Наименование | Размерность |
| Марка автомобиля | Шкода Октавиа | |
| Высота автомобиля, мм | ||
| Ширина автомобиля, мм | ||
| Полная масса автомобиля, кг | ||
| Максимальная скорость, км/ч | ||
| Тип ДВС | инжекторный | |
| Максимальная мощность, л.с. | ||
| Оборот, соответствующий максимальной мощности, об/мин | ||
| Максимальный крутящий момент, Н*м | ||
| Обороты, соответствующие максимальному моменту, об/мин | ||
| Передаточные числа КПП: | 3,46 1,96 1,28 0,98 0,81 | |
| Передаточное число главной передачи | 4,533 | |
| Колесная формула | 4х2 | |
| Марка шины | 195/65R15 | |
| КПД трансмиссии: | 0,93 0,94 0,95 0,96 0,97 |
Текущие значения мощности Ni и крутящего момента Mi двигателя определяются по формулам (1) и (2):
Ni = NN*[a*(ni/nN)+b*(ni/nN)2–c*(ni/nN)3], кВт; (1)
Mi = 9550*Ni/ni, Н*м; (2)
Где a,b,c – коэффициенты, значения которых зависят от типа и конструкции двигателя;
NN – максимальная эффективная мощность, кВт или л.с.;
nN – частота вращения коленчатого вала, соответствующая максимальной мощности, с-1 (об/мин);
Mmax – максимальный крутящий момент на коленчатом валу двигателя, Н*м;
nM – частота вращения коленчатого вала при максимальном крутящем моменте, с-1 (об/мин);
ni – текущие значения частоты вращения коленчатого вала, с-1 (об/мин);
nmax – максимальная частота вращения коленчатого вала, с-1 (об/мин);
nmin - минимальная частота вращения коленчатого вала, с-1 (об/мин).
Определяем крутящий момент на коленчатом валу двигателя при максимальной мощности MN по формуле 3:
MN = 9550*NN/nN; Н*м (3)
MN = 9550*75/5600 = 128 Н*м.
Определяем коэффициент приспособляемости по моменту kM по формуле 4:
kM = Mmax/MN; (4)
kM = 148/75 ≈ 1,9.
Определяем коэффициент запаса по частоте вращения kwпо формуле 5:
kw = nN/nM; (5)
kw = 5600/3800 = 1,47.
Определяем величину запаса крутящего момента двигателя Мз по формуле 6:
Мз = (kM – 1)*100%; (6)
Мз = (1,9 – 1)*100% = 90 %.
Коэффициенты двигателя a,b,cопределяются из системы уравнений для карбюраторного двигателя:
Решаем систему уравнений и получаем: а=0,5; b=2; c=1,5.
Рассчитываем текущие значения мощности ВСХ двигателя . Результаты расчетов ВСХ двигателя заносим в таблицу 2:
Таблица 2. Результаты расчетов ВСХ двигателя
| n двигателя | Ni | Mi |
| 10,84 | 103,51 | |
| 13,82 | 109,96 | |
| 16,99 | 115,91 | |
| 20,34 | 121,38 | |
| 23,82 | 126,35 | |
| 27,40 | 130,84 | |
| 31,06 | 134,84 | |
| 34,77 | 138,34 | |
| 38,49 | 141,36 | |
| 42,19 | 143,89 | |
| 45,84 | 145,93 | |
| 49,42 | 147,48 | |
| 52,88 | 148,54 | |
| 56,21 | 149,11 | |
| 59,36 | 149,19 | |
| 62,32 | ||
| 65,04 | 147,89 | |
| 67,50 | 146,50 | |
| 69,66 | 144,62 | |
| 71,50 | 142,26 | |
| 72,99 | 139,40 | |
| 74,08 | 136,06 | |
| 74,77 | 132,22 | |
| 75,00 | 127,90 | |
| 74,76 | 123,09 | |
| 74,00 | 117,79 |
Cтроим график ВСХ двигателя по полученным табличным данным.

Рисунок 1. ВСХ двигателя автомобиля
Построение графика силового баланса автомобиля.
2.1. Определение тяговой силы, Pт=f(V).
Cила, обеспечивающая движение автомобиля – тяговая сила, находится для каждой передачи по формуле 7:
Piт = (Mik*Uiтр*ηiтр)/rk; (7)
где Mik – момент соответствующий Mi из таблицы ВСХ;
Uiтр – передаточное число трансмиссии на i-той передаче,
Uiтр = Uгп*Uiкп;
Uгп – передаточное число главной передачи;
Uiкп – передаточное число коробки передач на i-той передаче;
ηiтр – КПД трансмиссии на i-той передаче;
rk – кинематический радиус колеса.
Расстояние от оси колеса до опорной поверхности, замеренное у неподвижного колеса, называется статическим радиусом rст.
Расстояние от оси колеса до опорной поверхности, замеренное при качении колеса называется динамическим радиусом.
При качении колеса по твердой опорной поверхности с малой скоростью статический и динамический радиусы его практически одинаковы. Поэтому, при приближенных расчетах динамический радиус принимают равным статическому.
Статический радиус колеса при известных конструктивных параметрах шин находим по формуле 8:
rст = 0,5*d+B*λсм*∆; (8)
где d – внутренний диаметр, мм;
В – ширина профиля, мм;
λсм – коэффициент смятия шин (для л./а.=0,8 – 0,95);
∆ - отношение высоты профиля к ширине (H/B для л./а.=0,7).
rст = 0,5*0,381+0,195*0,8*0.65 = 0,29 м.
Радиальная шина имеет смешенное миллиметрово-дюймовое обозначение. Например, маркировка 195/65R15 обозначает:
195 – условная ширина профиля шины (B), мм;
65 – отношение высоты профиля (H) к ее ширине (B),%;
«R» - обозначение радиальной шины;
15 – посадочный диаметр, дюйм.
При приближенных расчетах кинематический радиус колеса по формуле 9:
rк = rст*δ; (9)
где δ – коэффициент деформации шины (для л./а.=1,05).
rк = 0,300*1,05 = 0,306 м.
Рассчитываем передаточное число на каждой передачи по формуле 10:
Uiтр = Uгп*Uiкп; (10)
Результаты расчетов приведены в таблице 3:
Таблица 3. Результаты расчетов передаточного числа на каждой передаче
| № передачи | Uгп | Uiкп | Uiтр |
| 4,533 | 3,46 | 14,88 | |
| 4,533 | 1,96 | 8,43 | |
| 4,533 | 1,28 | 5,50 | |
| 4,533 | 0,98 | 4,21 | |
| 4,533 | 0,81 | 3,48 |
Рассчитываем Piт по формуле 7 на каждой передаче.
Для расчетов используем данные из таблицы 4:
Таблица 4. Дополнительные данные для расчетов
| № передачи | Uiтр | ηiтр | rк |
| 14,88 | 0,93 | 0,306 | |
| 8,43 | 0,94 | 0,306 | |
| 5,50 | 0,95 | 0,306 | |
| 4,21 | 0,96 | 0,306 | |
| 3,48 | 0,97 | 0,306 |
Результаты расчетов Piт приведены в таблице 5:
Таблица 5. Результаты расчетов тяговой силы
| Мк, Н*м | Рт, Н | ||||
| 1передача | 2 передача | 3 передача | 4 передача | 5 передача | |
| 95,77 | 4323,3 | 2475,4 | 1633,8 | 1264,0 | 1055,6 |
| 101,61 | 4587,2 | 2626,5 | 1733,5 | 1341,2 | 1120,1 |
| 107,06 | 4833,0 | 2767,2 | 1826,4 | 1413,0 | 1180,1 |
| 112,10 | 5060,5 | 2897,5 | 1912,4 | 1479,6 | 1235,6 |
| 116,73 | 5269,8 | 3017,3 | 1991,5 | 1540,8 | 1286,8 |
| 120,97 | 5461,0 | 3126,8 | 2063,7 | 1596,6 | 1333,4 |
| 124,80 | 5633,9 | 3225,8 | 2129,0 | 1647,2 | 1375,6 |
| 128,22 | 5788,6 | 3314,4 | 2187,5 | 1692,4 | 1413,4 |
| 131,25 | 5925,2 | 3392,5 | 2239,1 | 1732,4 | 1446,8 |
| 133,87 | 6043,5 | 3460,3 | 2283,8 | 1767,0 | 1475,7 |
| 136,09 | 6143,6 | 3517,6 | 2321,7 | 1796,2 | 1500,1 |
| 137,90 | 6225,5 | 3564,5 | 2352,6 | 1820,2 | 1520,1 |
| 139,31 | 6289,2 | 3601,0 | 2376,7 | 1838,8 | 1535,7 |
| 140,32 | 6334,7 | 3627,0 | 2393,9 | 1852,1 | 1546,8 |
| 140,93 | 6362,0 | 3642,7 | 2404,2 | 1860,1 | 1553,4 |
| 6371,1 | 3647,9 | 2407,6 | 1862,8 | 1555,7 | |
| 140,93 | 6362,0 | 3642,7 | 2404,2 | 1860,1 | 1553,4 |
| 140,32 | 6334,7 | 3627,0 | 2393,9 | 1852,1 | 1546,8 |
| 139,31 | 6289,2 | 3601,0 | 2376,7 | 1838,8 | 1535,7 |
| 137,90 | 6225,5 | 3564,5 | 2352,6 | 1820,2 | 1520,1 |
| 136,09 | 6143,6 | 3517,6 | 2321,7 | 1796,2 | 1500,1 |
| 133,87 | 6043,5 | 3460,3 | 2283,8 | 1767,0 | 1475,7 |
| 131,25 | 5925,2 | 3392,5 | 2239,1 | 1732,4 | 1446,8 |
| 128,22 | 5788,6 | 3314,4 | 2187,5 | 1692,4 | 1413,4 |
| 124,80 | 5633,9 | 3225,8 | 2129,0 | 1647,2 | 1375,6 |
| 120,97 | 5461,0 | 3126,8 | 2063,7 | 1596,6 | 1333,4 |
Определяем интервалы скоростей движения автомобиля по формуле 11:
Va = 0,377*nдв/Uiтр*rк; км/ч. (11)
Результаты расчетов интервалов скоростей движения автомобиля приведены в таблице 6:
Таблица 6. Результаты расчетов интервалов скоростей
| nдв, об/мин | Va, км/ч | ||||
| 1передача | 2 передача | 3 передача | 4 передача | 5 передача | |
| 7,77 | 13,71 | 20,99 | 27,42 | 33,18 | |
| 9,32 | 16,45 | 25,19 | 32,90 | 39,81 | |
| 10,87 | 19,19 | 29,39 | 38,39 | 46,45 | |
| 12,43 | 21,94 | 33,59 | 43,87 | 53,08 | |
| 13,98 | 24,68 | 37,79 | 49,36 | 59,72 | |
| 15,53 | 27,42 | 41,99 | 54,84 | 66,35 | |
| 17,09 | 30,16 | 46,19 | 60,32 | 72,99 | |
| 18,64 | 32,90 | 50,38 | 65,81 | 79,62 | |
| 20,19 | 35,65 | 54,58 | 71,29 | 86,26 | |
| 21,75 | 38,39 | 58,78 | 76,78 | 92,89 | |
| 23,30 | 41,13 | 62,98 | 82,26 | 99,53 | |
| 24,85 | 43,87 | 67,18 | 87,74 | 106,16 | |
| 26,41 | 46,61 | 71,38 | 93,23 | 112,80 | |
| 27,96 | 49,36 | 75,58 | 98,71 | 119,43 | |
| 29,51 | 52,10 | 79,78 | 104,20 | 126,07 | |
| 31,07 | 54,84 | 83,97 | 109,68 | 132,70 | |
| 32,62 | 57,58 | 88,17 | 115,16 | 139,34 | |
| 34,17 | 60,32 | 92,37 | 120,65 | 145,97 | |
| 35,73 | 63,07 | 96,57 | 126,13 | 152,61 | |
| 37,28 | 65,81 | 100,77 | 131,62 | 159,24 | |
| 38,83 | 68,55 | 104,97 | 137,10 | 165,88 | |
| 40,39 | 71,29 | 109,17 | 142,58 | 172,51 | |
| 41,94 | 74,03 | 113,37 | 148,07 | 179,15 | |
| 43,49 | 76,78 | 117,56 | 153,55 | 185,78 | |
| 45,05 | 79,52 | 121,76 | 159,04 | 192,42 | |
| 46,60 | 82,26 | 125,96 | 164,52 | 199,05 |
Строим график тяговой силы по полученным табличным данным.
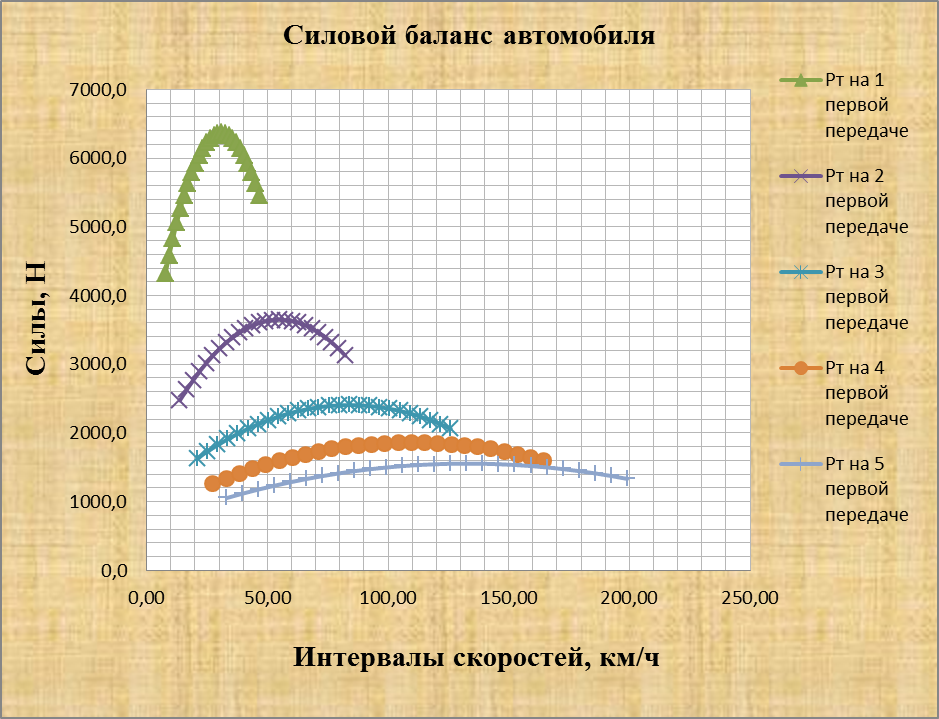
Рисунок 2. Сила тяги автомобиля
2.2. Определение силы лобового сопротивления Pw.
Значительная часть полезной мощности, вырабатываемой автомобильным двигателем, расходуется на преодоление сил сопротивления воздушной среды. Основные показатели легкового автомобиля на высоких скоростях зависят, прежде всего от его аэродинамических качеств.
Очень важную роль играет конструкция стоек крыши, водосливных желобов и других подобных устройств.
Рассчитаем силу лобового сопротивления для высшей передачи по формуле 12:
Pw= kв*Fd*Va2; (12)
где kв – коэффициент аэродинамического сопротивления, кг/м3 (kв=0,3);
Fd – лобовая площадь автомобиля, м2 (Fd=2,32);
Результаты расчетов силы лобового сопротивления приведены в таблице 7:
Таблица 7. Результаты расчетов силы лобового сопротивления
| Va, км/ч | Pw |
| 33,18 | 58,92 |
| 39,81 | 84,85 |
| 46,45 | 115,49 |
| 53,08 | 150,84 |
| 59,72 | 190,91 |
| 66,35 | 235,69 |
| 72,99 | 285,19 |
| 79,62 | 339,40 |
| 86,26 | 398,32 |
| 92,89 | 461,96 |
| 99,53 | 530,31 |
| 106,16 | 603,38 |
| 112,80 | 681,16 |
| 119,43 | 763,65 |
| 126,07 | 850,86 |
| 132,70 | 942,78 |
| 139,34 | 1039,41 |
| 145,97 | 1140,76 |
| 152,61 | 1246,82 |
| 159,24 | 1357,60 |
| 165,88 | 1473,09 |
| 172,51 | 1593,29 |
| 179,15 | 1718,21 |
| 185,78 | 1847,84 |
| 192,42 | 1982,19 |
| 199,05 | 2121,25 |
| 33,18 | 58,92 |
2.3. Определение силы дорожного сопротивления Рψ.
Сила дорожного сопротивления складывается из двух составляющих: силы сопротивления качению колеса и силы, обусловленной подъемом дорожного полотна.
Рассчитываем силу дорожного сопротивления по формуле 13:
Рψ = Ga*ψ, Н; (13)
где Ga – вес автомобиля, Ga = m*g;
ψ – приведенный коэффициент дорожного сопротивления.
Рассчитываем приведенный коэффициент дорожного сопротивления по формуле 14:
ψ =f±i, (14)
i – уклон дороги, в нашем случае уклон отсутствует так как автомобиль движется по горизонтальной дороге (i=0);
f – коэффициент сопротивлению качению.
Рассчитываем приведенный коэффициент сопротивлению качению по формуле 15:
f=f0+kv*Va2/13; (15)
где f0 начальное значение коэффициента сопротивления качению (f0=0,018);
kv – динамический коэффициент (kv = 7*10(-6)).
Результаты расчетов fи ψ приведены в таблице 8:
Таблица 8. Результаты расчетов fи ψ
| Va, км/ч | f | ψ |
| 33,18 | 0,019 | 0,019 |
| 39,81 | 0,019 | 0,019 |
| 46,45 | 0,019 | 0,019 |
| 53,08 | 0,020 | 0,020 |
| 59,72 | 0,020 | 0,020 |
| 66,35 | 0,020 | 0,020 |
| 72,99 | 0,021 | 0,021 |
| 79,62 | 0,021 | 0,021 |
| 86,26 | 0,022 | 0,022 |
| 92,89 | 0,023 | 0,023 |
| 99,53 | 0,023 | 0,023 |
| 106,16 | 0,024 | 0,024 |
| 112,80 | 0,025 | 0,025 |
| 119,43 | 0,026 | 0,026 |
| 126,07 | 0,027 | 0,027 |
| 132,70 | 0,027 | 0,027 |
| 139,34 | 0,028 | 0,028 |
| 145,97 | 0,029 | 0,029 |
| 152,61 | 0,031 | 0,031 |
| 159,24 | 0,032 | 0,032 |
| 165,88 | 0,033 | 0,033 |
| 172,51 | 0,034 | 0,034 |
| 179,15 | 0,035 | 0,035 |
| 185,78 | 0,037 | 0,037 |
| 192,42 | 0,038 | 0,038 |
| 199,05 | 0,039 | 0,039 |
Результаты расчета силы дорожного сопротивления приведены в таблице 9:
Таблица 9. Сила дорожного сопротивления
| Pψ, Н | Ψ |
| 342,55 | 0,019 |
| 347,35 | 0,019 |
| 353,03 | 0,019 |
| 359,58 | 0,020 |
| 367,01 | 0,020 |
| 375,31 | 0,020 |
| 384,48 | 0,021 |
| 394,52 | 0,021 |
| 405,44 | 0,022 |
| 417,23 | 0,023 |
| 429,90 | 0,023 |
| 443,44 | 0,024 |
| 457,85 | 0,025 |
| 473,14 | 0,026 |
| 489,29 | 0,027 |
| 506,33 | 0,027 |
| 524,23 | 0,028 |
| 543,01 | 0,029 |
| 562,67 | 0,031 |
| 583,19 | 0,032 |
| 604,59 | 0,033 |
| 626,87 | 0,034 |
| 650,01 | 0,035 |
| 674,03 | 0,037 |
| 698,93 | 0,038 |
| 724,70 | 0,039 |
Строим график силового баланса по полученным табличным данным.
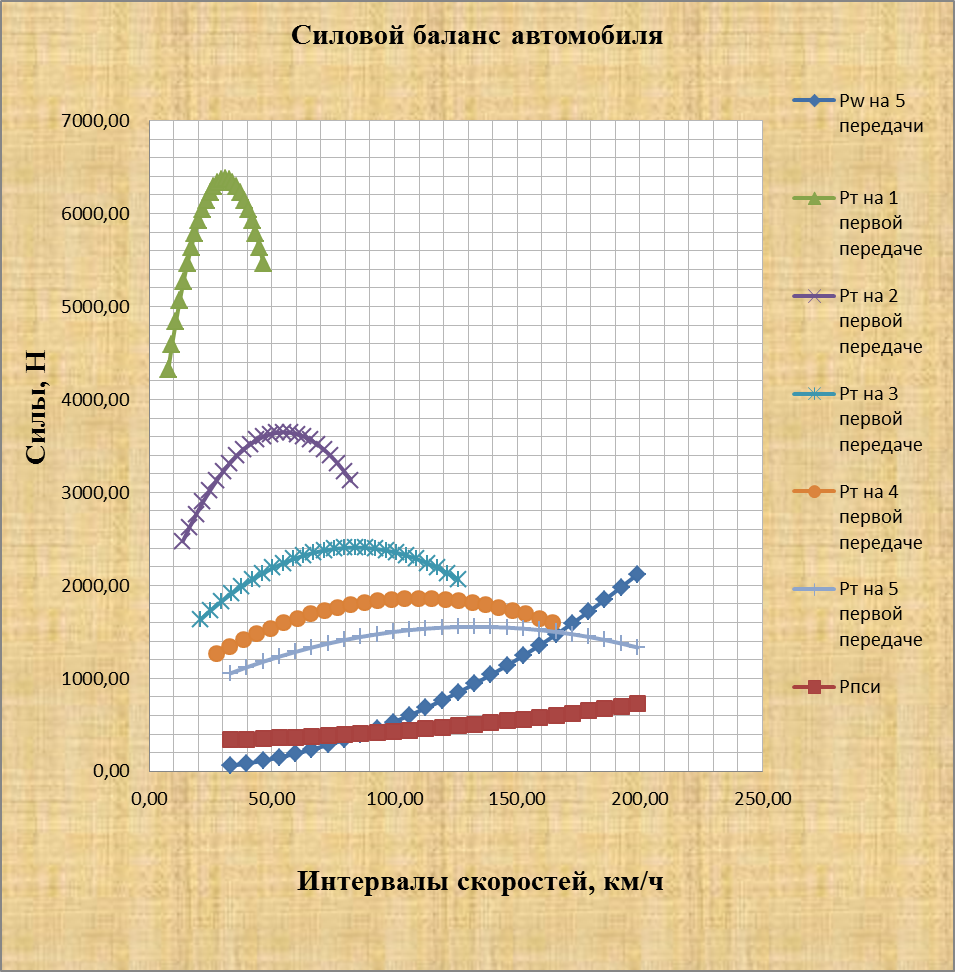
Рисунок 3. Силовой баланс автомобиля
3. Построение динамической характеристики Д=f(V).
Сравнение автомобилей по мощности двигателя не взывает затруднений, когда автомобили близки по массе, аэродинамике, типам трансмиссий, передаточным числам, размерам шин. Однако наиболее универсальным показателем для сравнения различных автомобилей, мотоциклов и т.д., является величина, называемая динамическим фактором, совпадающая с величиной угла подъема дороги, который доступен автомобилю. На горизонтальной дороге избыток тяговой силы может быть затруднен на разгон или на преодоление тяжелого участка с рыхлым снегом, песком, гравием. Таким образом динамическим фактором называют величину свободной тяговой силы, приходящейся на единицу веса автомобиля.
Определяем динамический фактор по формуле 16:
Д=(Pт-Pw)/Ga. (16)
Результаты расчетов приведены в таблице 10:
Таблица 10. Результаты расчетов динамического фактора
| D | ||||
| 1 передача | 2 передача | 3 передача | 4 передача | 5 передача |
| 0,2382 | 0,1350 | 0,0880 | 0,0673 | 0,0557 |
| 0,2515 | 0,1420 | 0,0921 | 0,0702 | 0,0578 |
| 0,2635 | 0,1481 | 0,0956 | 0,0725 | 0,0595 |
| 0,2742 | 0,1534 | 0,0984 | 0,0742 | 0,0606 |
| 0,2837 | 0,1579 | 0,1006 | 0,0754 | 0,0612 |
| 0,2919 | 0,1615 | 0,1021 | 0,0760 | 0,0613 |
| 0,2988 | 0,1642 | 0,1030 | 0,0761 | 0,0609 |
| 0,3044 | 0,1662 | 0,1032 | 0,0756 | 0,0600 |
| 0,3087 | 0,1672 | 0,1028 | 0,0745 | 0,0586 |
| 0,3118 | 0,1675 | 0,1018 | 0,0729 | 0,0566 |
| 0,3135 | 0,1669 | 0,1001 | 0,0707 | 0,0542 |
| 0,3140 | 0,1654 | 0,0977 | 0,0680 | 0,0512 |
| 0,3132 | 0,1631 | 0,0947 | 0,0647 | 0,0477 |
| 0,3112 | 0,1599 | 0,0911 | 0,0608 | 0,0437 |
| 0,3078 | 0,1559 | 0,0868 | 0,0564 | 0,0392 |
| 0,3032 | 0,1511 | 0,0818 | 0,0514 | 0,0342 |
| 0,2973 | 0,1454 | 0,0762 | 0,0458 | 0,0287 |
| 0,2901 | 0,1389 | 0,0700 | 0,0397 | 0,0227 |
| 0,2816 | 0,1315 | 0,0631 | 0,0331 | 0,0161 |
| 0,2719 | 0,1233 | 0,0556 | 0,0258 | 0,0091 |
| 0,2609 | 0,1142 | 0,0474 | 0,0180 | 0,0015 |
| 0,2486 | 0,1043 | 0,0386 | 0,0097 | -0,0066 |
| 0,2350 | 0,0935 | 0,0291 | 0,0008 | -0,0152 |
| 0,2201 | 0,0819 | 0,0190 | -0,0087 | -0,0243 |
| 0,2040 | 0,0695 | 0,0082 | -0,0187 | -0,0339 |
| 0,1865 | 0,0562 | -0,0032 | -0,0293 | -0,0440 |
На основе табличных данных строим график динамической характеристики Д=f(V).

Рисунок 4. Динамическая характеристика автомобиля
4. Построение графика ускорений, j=f(V).
Для определения ускорения мы определили коэффициент сопротивления дороги ψ на каждой передаче. Результаты расчетов приведены в таблице 11:
Таблица 11. Результаты расчетов коэффициента сопротивления дороги ψ
| Ψ | ||||
| 1 передача | 2 передача | 3 передача | 4 передача | 5 передача |
| 0,0180 | 0,0181 | 0,0182 | 0,0184 | 0,0186 |
| 0,0180 | 0,0181 | 0,0183 | 0,0186 | 0,0189 |
| 0,0181 | 0,0182 | 0,0185 | 0,0188 | 0,0192 |
| 0,0181 | 0,0183 | 0,0186 | 0,0190 | 0,0195 |
| 0,0181 | 0,0183 | 0,0188 | 0,0193 | 0,0199 |
| 0,0181 | 0,0184 | 0,0189 | 0,0196 | 0,0204 |
| 0,0182 | 0,0185 | 0,0191 | 0,0200 | 0,0209 |
| 0,0182 | 0,0186 | 0,0194 | 0,0203 | 0,0214 |
| 0,0182 | 0,0187 | 0,0196 | 0,0207 | 0,0220 |
| 0,0183 | 0,0188 | 0,0199 | 0,0212 | 0,0226 |
| 0,0183 | 0,0189 | 0,0201 | 0,0216 | 0,0233 |
| 0,0183 | 0,0190 | 0,0204 | 0,0221 | 0,0241 |
| 0,0184 | 0,0192 | 0,0207 | 0,0227 | 0,0249 |
| 0,0184 | 0,0193 | 0,0211 | 0,0232 | 0,0257 |
| 0,0185 | 0,0195 | 0,0214 | 0,0238 | 0,0266 |
| 0,0185 | 0,0196 | 0,0218 | 0,0245 | 0,0275 |
| 0,0186 | 0,0198 | 0,0222 | 0,0251 | 0,0285 |
| 0,0186 | 0,0200 | 0,0226 | 0,0258 | 0,0295 |
| 0,0187 | 0,0201 | 0,0230 | 0,0266 | 0,0305 |
| 0,0187 | 0,0203 | 0,0235 | 0,0273 | 0,0317 |
| 0,0188 | 0,0205 | 0,0239 | 0,0281 | 0,0328 |
| 0,0189 | 0,0207 | 0,0244 | 0,0289 | 0,0340 |
| 0,0189 | 0,0210 | 0,0249 | 0,0298 | 0,0353 |
| 0,0190 | 0,0212 | 0,0254 | 0,0307 | 0,0366 |
| 0,0191 | 0,0214 | 0,0260 | 0,0316 | 0,0379 |
| 0,0192 | 0,0216 | 0,0265 | 0,0326 | 0,0393 |
Определяем коэффициент δвр по формуле 17:
δвр=1+δ1*Uкпi2 *δ2; (17)
где Uкпi – передаточное число коробки передач.
Результаты расчетов δвр приведены в таблице 12:
Таблица 12. Результаты расчетов δвр
| № передачи | δ1 | δ2 | Uкпi | δвр |
| 0,04 | 0,05 | 3,46 | 1,0239 | |
| 0,04 | 0,05 | 1,96 | 1,0077 | |
| 0,04 | 0,05 | 1,28 | 1,0033 | |
| 0,04 | 0,05 | 0,98 | 1,0019 | |
| 0,04 | 0,05 | 0,81 | 1,0013 |
Рассчитываем значения ускорения автомобиля в заданных дорожных условиях на разных передачах по формуле 18:
j= g*(Д – ψ)/δвр, м/с2 (18)
где g– ускорение свободного падения, 9,81 м/с2;
Д – динамическая характеристика;
ψ – коэффициент сопротивления дороги.
Результаты расчетов представлены в таблице 13:
Таблица 13. Ускорения автомобиля
| j, м/с2 | ||||
| 1передача | 2 передача | 3 передача | 4 передача | 5 передача |
| 2,1092 | 1,1378 | 0,6818 | 0,4788 | 0,3633 |
| 2,2365 | 1,2054 | 0,7211 | 0,5051 | 0,3818 |
| 2,3514 | 1,2647 | 0,7539 | 0,5256 | 0,3948 |
| 2,4541 | 1,3158 | 0,7801 | 0,5403 | 0,4024 |
| 2,5444 | 1,3585 | 0,7999 | 0,5491 | 0,4045 |
| 2,6225 | 1,3929 | 0,8131 | 0,5522 | 0,4011 |
| 2,6883 | 1,4190 | 0,8198 | 0,5495 | 0,3923 |
| 2,7418 | 1,4368 | 0,8200 | 0,5409 | 0,3779 |
| 2,7830 | 1,4463 | 0,8137 | 0,5265 | 0,3581 |
| 2,8120 | 1,4474 | 0,8008 | 0,5064 | 0,3329 |
| 2,8286 | 1,4403 | 0,7815 | 0,4804 | 0,3021 |
| 2,8329 | 1,4248 | 0,7556 | 0,4486 | 0,2659 |
| 2,8250 | 1,4011 | 0,7232 | 0,4110 | 0,2241 |
| 2,8048 | 1,3690 | 0,6843 | 0,3677 | 0,1770 |
| 2,7723 | 1,3286 | 0,6389 | 0,3185 | 0,1243 |
| 2,7275 | 1,2800 | 0,5869 | 0,2635 | 0,0661 |
| 2,6704 | 1,2230 | 0,5285 | 0,2027 | 0,0025 |
| 2,6010 | 1,1577 | 0,4635 | 0,1360 | -0,0666 |
| 2,5193 | 1,0840 | 0,3920 | 0,0636 | -0,1411 |
| 2,4254 | 1,0021 | 0,3140 | -0,0146 | -0,2212 |
| 2,3191 | 0,9119 | 0,2294 | -0,0986 | -0,3067 |
| 2,2006 | 0,8133 | 0,1384 | -0,1885 | -0,3977 |
| 2,0697 | 0,7065 | 0,0408 | -0,2841 | -0,4942 |
| 1,9266 | 0,5913 | -0,0633 | -0,3855 | -0,5961 |
| 1,7712 | 0,4678 | -0,1739 | -0,4928 | -0,7036 |
| 1,6035 | 0,3361 | -0,2910 | -0,6058 | -0,8165 |
На основе табличных данных строим график ускорения j=f(V).
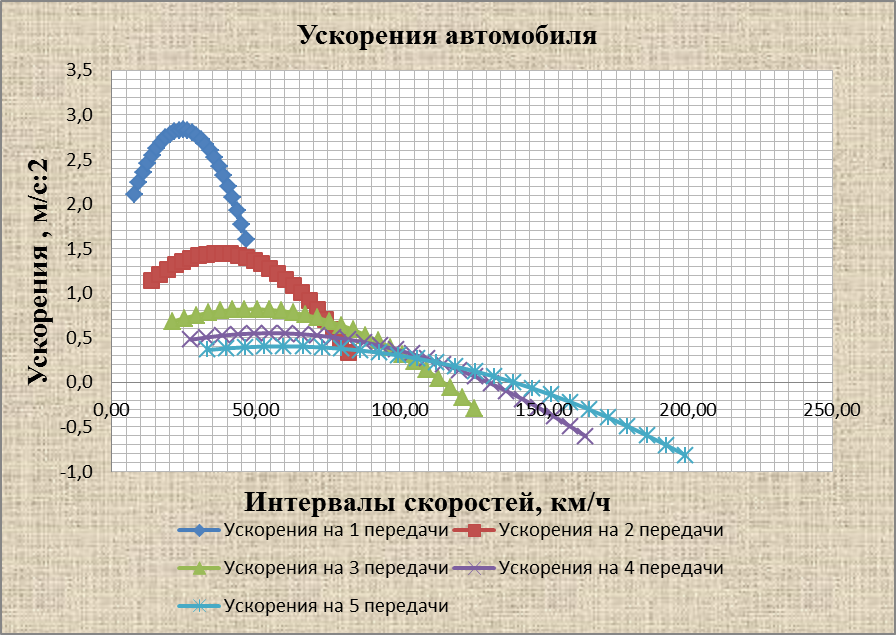
Рисунок 5. Ускорения автомобиля
5. Построение скоростной характеристики S=f(V); t=f(V).
Для определения абсолютных величин и характера разгонной характеристики на различных передачах строят график интенсивности разгона. При расчетах строят график для ускорения автомобиля на высшей передаче.
Для определения времени и пути разгона в интервале скоростей от минимальной до максимальной этот интервал разбивают на мелкие участки, для каждого из которых считают jср по формуле 19:
jср=0,5*(jн + jк); (19)
где jн, jк – ускорения в начале и конце участка, м/с2.
Строим график ускорения на высшей передаче.

Рисунок 6. Ускорения автомобиля на высшей передачи
Для каждого участка также определяют Vkпо формуле 20:
Vk = Vн + j*∆t, (20)
где ∆t – время изменения скорости от Vн до Vk, с.
Определяют ∆t по формуле 21:
∆t= (Vk - Vн )/jср. (21)
Путь за время движения ∆t определяем по формуле 22:
S=Vср*∆t, (22)
где Vср – средняя скорость движения автомобиля, определяем по формуле 23:
Vср= (Vн + Vк)/2. (23)
Определяем время движения по формуле 24:
t=ti +∆ti+1. (24)
Результаты всех расчетов приведены в таблице 14:
Таблица 14. Результаты расчетов Vср,jср, ∆t,S,t
| jср, м/с^2 | Va, м/с | Δt, с | Vср, м/с | S, м | t, с |
| 0,373 | 8,9830 | 4,8227 | 9,8813 | 47,6548 | 4,8227 |
| 0,388 | 10,7796 | 4,6266 | 11,6779 | 54,0296 | 9,4493 |
| 0,399 | 12,5762 | 4,5070 | 13,4746 | 60,7292 | 9,1336 |
| 0,403 | 14,3729 | 4,4529 | 15,2712 | 68,0016 | 8,9599 |
| 0,403 | 16,1695 | 4,4600 | 17,0678 | 76,1228 | 8,9130 |
| 0,397 | 17,9661 | 4,5288 | 18,8644 | 85,4332 | 8,9888 |
| 0,385 | 19,7627 | 4,6652 | 20,6610 | 96,3866 | 9,1940 |
| 0,368 | 21,5593 | 4,8815 | 22,4576 | 109,6274 | 9,5467 |
| 0,345 | 23,3559 | 5,2001 | 24,2542 | 126,1240 | 10,0816 |
| 0,317 | 25,1525 | 5,6591 | 26,0508 | 147,4240 | 10,8592 |
| 0,284 | 26,9491 | 6,3267 | 27,8474 | 176,1816 | 11,9858 |
| 0,245 | 28,7457 | 7,3332 | 29,6440 | 217,3844 | 13,6598 |
| 0,201 | 30,5423 | 8,9586 | 31,4406 | 281,6637 | 16,2918 |
| 0,151 | 32,3389 | 11,9283 | 33,2372 | 396,4628 | 20,8869 |
| 0,095 | 34,1355 | 18,8694 | 35,0338 | 661,0657 | 30,7976 |
| 0,034 | 35,9321 | 52,3302 | 36,8304 | 1927,3440 | 71,1995 |
| -0,032 | 37,7287 | -56,1001 | 38,6270 | -2166,9806 | -3,7699 |
| -0,104 | 39,5254 | -17,2986 | 40,4237 | -699,2726 | -73,3987 |
| -0,181 | 41,3220 | -9,9168 | 42,2203 | -418,6892 | -27,2154 |
| -0,264 | 43,1186 | -6,8065 | 44,0169 | -299,6010 | -16,7233 |
| -0,352 | 44,9152 | -5,1009 | 45,8135 | -233,6878 | -11,9074 |
| -0,446 | 46,7118 | -4,0287 | 47,6101 | -191,8052 | -9,1295 |
| -0,545 | 48,5084 | -3,2955 | 49,4067 | -162,8194 | -7,3242 |
| -0,650 | 50,3050 | -2,7646 | 51,2033 | -141,5565 | -6,0601 |
| -0,760 | 52,1016 | -2,3639 | 52,9999 | -125,2845 | -5,1285 |
| -0,662 | 53,8982 | -2,7156 | 54,7965 | -148,8054 | -5,0795 |
На основе полученных табличных данных строим графики S=f(V); t=f(V)/

Рисунок 7. Время изменения скорости

Рисунок 8. График пути движения
6. Построения топливной характеристики QS=f(V).
Топливная характеристика строится для высшей передачи при следующих значениях приведенного коэффициента дорожного сопротивления:
1. Ψ1 =  = 0,0613;
= 0,0613;
2. Ψ2 = 0,75* = 0,0460;
3. Ψ3 = (Ψ1 + Ψ2)/2 = 0,0536.
Определяем дорожное сопротивление Pψпо формуле 25:
Pψ = Ga*ψ. (25)
Результаты расчетов Pψ представлены в таблице 15:
Таблица 15. Результаты расчета дорожного сопротивления
| Pψ1 | Pψ2 | Pψ3 |
| 1129,391 | 847,0434 | 988,2173 |
А результаты определения аэродинамического сопротивления Pwв таблице 16:
Таблица 16. Аэродинамическое сопротивление
| Pw |
| 58,92 |
| 84,85 |
| 115,49 |
| 150,84 |
| 190,91 |
| 235,69 |
| 285,19 |
| 339,40 |
| 398,32 |
| 461,96 |
| 530,31 |
| 603,38 |
| 681,16 |
| 763,65 |
| 850,86 |
| 942,78 |
| 1039,41 |
| 1140,76 |
| 1246,82 |
| 1300,84 |
| 1449,39 |
| 1605,97 |
| 1770,58 |
| 1943,22 |
Находим мощность, затрачиваемую на преодоление сил дорожного сопротивленияNψ по формуле 26; мощность, затрачиваемую на преодоление сил лобового сопротивленияNw по формуле 27 и мощность на ведущей осиNт по формуле 28:
Nψ= (Pψ* Va)/3600. (26)
Nw= (Pw * Va)/3600. (27)
Nт= Nψ + Nw. (28)
Определяем мощность двигателя, необходимую для обеспечения движения автомобиля с заданной скоростью при определенных дорожных сопротивлениях Neпо формуле 29:
Ne = Nт/  , (29)
, (29)
где Nт – мощность на ведущей оси, кВТ;
– КПД трансмиссии на высшей передаче, ( = 0,97)
Результаты расчетов приведены в таблице 17:
Таблица 17. Результаты расчетов мощностей
| NΨ, кВт | Nт, кВт | Ne, кВт | Nw, кВт | |||||||
| 10,4077 | 7,8057 | 9,1067 | 10,9507 | 8,3487 | 9,6497 | 11,28934 | 9,948145 | 11,63849 | 0,5430 | |
| 12,4892 | 9,3669 | 10,9280 | 13,4275 | 10,3052 | 11,8663 | 13,84278 | 12,23334 | 14,2709 | 0,9383 | |
| 14,5707 | 10,9280 | 12,7494 | 16,0607 | 12,4180 | 14,2394 | 16,55743 | 14,67976 | 17,06952 | 1,4900 | |
| 16,6523 | 12,4892 | 14,5707 | 18,8764 | 14,7133 | 16,7948 | 19,46018 | 17,31427 | 20,06204 | 2,2241 | |
| 18,7338 | 14,0503 | 16,3921 | 21,9005 | 17,2171 | 19,5588 | 22,57788 | 20,16374 | 23,27617 | 3,1668 | |
| 20,8153 | 15,6115 | 18,2134 | 25,1593 | 19,9555 | 22,5574 | 25,93742 | 23,25503 | 26,73961 | 4,3440 | |
| 22,8969 | 17,1726 | 20,0347 | 28,6787 | 22,9545 | 25,8166 | 29,56565 | 26,61503 | 30,48006 | 5,7818 | |
| 24,9784 | 18,73
Популярное: Модели организации как закрытой, открытой, частично открытой системы: Закрытая система имеет жесткие фиксированные границы, ее действия относительно независимы... Почему стероиды повышают давление?: Основных причин три... Организация как механизм и форма жизни коллектива: Организация не сможет достичь поставленных целей без соответствующей внутренней...  ©2015-2024 megaobuchalka.ru Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. (3904)
|
Почему 1285321 студент выбрали МегаОбучалку... Система поиска информации Мобильная версия сайта Удобная навигация Нет шокирующей рекламы |
(0.013 сек.)