 |
Главная |


Анализ переходного процесса в дискретной САУ при подаче ступенчатого воздействия
|
из
5.00
|
Краткое описание системы
Дана структурная схема системы управления:
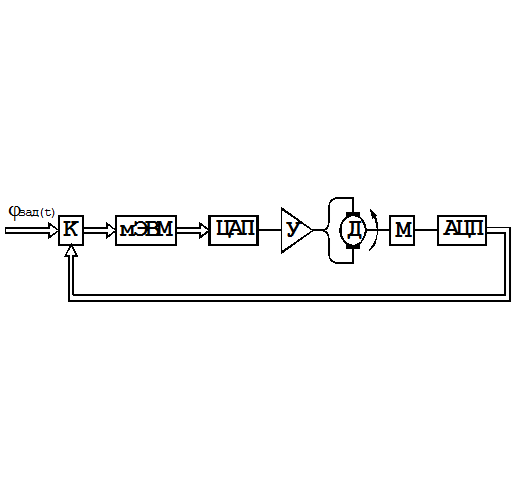
Рис.1 Структурная схема
Где К - суммирующее устройство;
мЭВМ - микро-ЭВМ (сбор аналоговой и цифровой информации, обработка информации и формирование управляющих воздействий, вывод управляющих воздействий на объект);
ЦАП - цифро-аналоговый преобразователь;
АЦП - аналогово-цифровой преобразователь;
У - усилитель;
М - исполнительный механизм;
Д - электродвигатель

Рис.2 Функциональная схема
Построение математической модели САУ
Импульсную САУ можно представить как систему непрерывного действия, в которой происходит периодическое прерывание контура, осуществляемое импульсным элементом (ИЭ), Непрерывная часть (НП) импульсной системы играет роль фильтра низких частот.

Рис.3 Математическая модель САУ
 ,
,  ;
;


Анализ устойчивости непрерывной САУ
Устойчивость замкнутой САУ проверяется по логарифмическим амплитудным и фазовым частотным характеристикам без применения корректирующего звена.

Рис.4 Структурная схема САУ для анализа устойчивости.
Передаточная функция разомкнутой системы:



Передаточная функция замкнутой системы:

Определитель Гурвица по коэффициентам знаменателя:

Все определители > 0. Делаем предположение, что система устойчива.
Для проверки построим амплитудно-фазовую частотную характеристику системы:


Рис.5 АФЧХ непрерывной системы.
Из Рис.5 видно, что годограф не охватывает точку (-1, j0). Делаем вывод, что система устойчива.
Анализ дискретных САУ

Рис.6 Структурная схема САУ без регулятора.
Передаточная функция разомкнутой системы:

Разложим дробь с применением метода неопределённых множителей:
Допустим
 .
.
Тогда 

Передаточная функция разомкнутой системы:

После сокращения получим:

Для использования аналога критерия устойчивости Гурвица, сделаем подстановку в знаменателе:
 :
:

Найдём коэффициенты числителя:
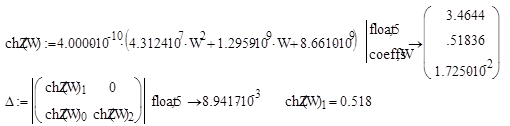
Т.к. все определители > 0, то делаем вывод, что система устойчива.
Передаточная функция замкнутой системы:

Знаменатель ПФ:

Сделаем подстановку в знаменателе:
.

Найдём коэффициенты числителя:

Т.к. все определители > 0, то делаем вывод, что система устойчива.
Анализ переходного процесса в дискретной САУ при подаче ступенчатого воздействия
Подадим в систему ступенчатый сигнал:

Тогда выходной сигнал будет равен:

Сделаем обратное Z-преобразование выходного сигнала:

В результате получим переходной процесс:
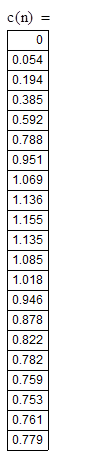

Рис.7 Переходной процесс в системе без регулятора при подаче единичного ступенчатого сигнала.
Из графика видно, что перерегулирование в системе достигает 20%, время регулирования превышает 3 с (30 тактов), а установившаяся ошибка по положению равна 14%.
Чтобы получить более качественный переходной процесс, необходимо в систему включить ПИД-регулятор.
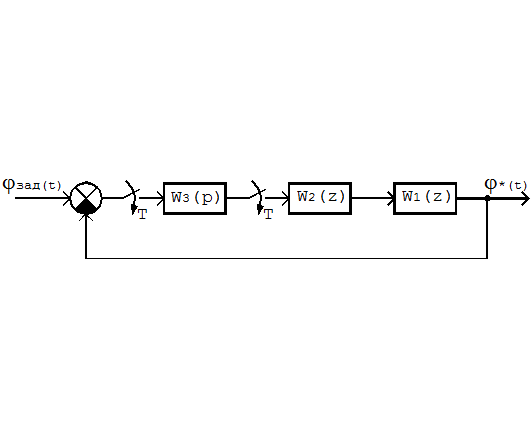
Рис.8 Структурная схема САУ с ПИД-регулятором.
Передаточная функция ПИД-регулятора:

Тогда передаточная функция замкнутой системы будет равна:

-преобразование выходного сигнала:

Обратное Z-преобразование выходного сигнала:

Получили переходной процесс:


Рис.9 Переходной процесс в системе с ПИД-регулятором при подаче единичного ступенчатого сигнала.
Из рис. 10 видно, что применение ПИД-регулятора положительно повлияло на качество переходного процесса. Перегулирование уменьшилось до 10%, установившаяся статическая ошибка по положению равна 0, а время регулирования значительно уменьшилось: на 15-м такте (1.5 с) ошибка равна 0.2%, а нулевого значения достигает на 40-м.
Для более тонкой настройки системы изменим коэффициенты КП и КD регулятора.
При КП =1.38, КD =0.38 получим следующий переходной процесс:
система автоматический управление устойчивость
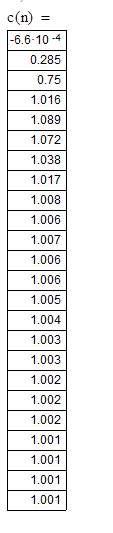

Рис.10 Переходной процесс в системе с ПИД-регулятором при подаче единичного ступенчатого сигнала при отладке коэффициентов КП и КD регулятора.
Ошибка на 15-м такте не изменилась, но она уходит в 0 уже на 30-м такте.
Но вместе с тем мы добились более качественного переходного процесса при подаче линейно-нарастающего воздействия (см. пункт 6 с. 14)
Для большей убедительности приведём график переходного процесса с увеличением масштаба по оси Оу:

Рис.11 Переходной процесс в увеличенном масштабе
Проверка:
Проверку осуществляем при помощи операторно-рекуррентого метода.
Уберём из выходного сигнала единичное ступенчатое воздействие:

После преобразования формула для вычисления выходного сигнала принимает вид:

Составим рекуррентное уравнение с учётом начальных условий:

В результате вычисления получим:


Рис.12 Переходной процесс, полученный в результате проверки.
Разница результатов вычисления первым и вторым методами не превышает 0.3%.
Вывод: переходный процесс рассчитан правильно, все требования к быстродействию и качеству системы выполнены.
|
из
5.00
|
Обсуждение в статье: Анализ переходного процесса в дискретной САУ при подаче ступенчатого воздействия |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы