 |
Главная |


Л.2. Вопрос №2. Метод вращающегося поля для трехфазного напряжения
Предлагаемый Способ определения частоты трехфазного напряжения поясняется с помощью прилагаемых чертежей (фиг.1-3), на которых сделаны следующие обозначения.
Фиг.1
Фиг.2
Фиг.3
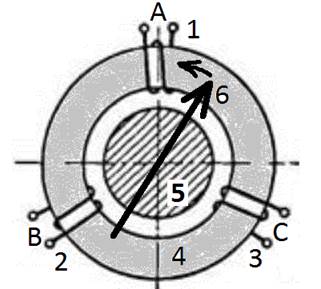
· Катушки статора двигателя фазы A (1), В (2), С (3), к которым подключено трехфазное напряжение Ua, Ub, Uc.
· Катушки статора двигателя A (1), В (2), С (3) намотаны на магнитопровод статора 4.
· Токи, протекающие по катушкам 1, 2, 3 создают в роторе 5 вращающееся поле U (6).
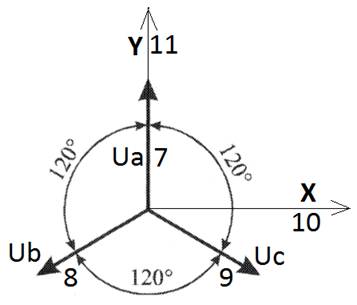
· Три вектора напряжения Ua (7), Ub (8), Uc (9), между которыми имеется угол 120 градусов, создают проекции на прямоугольную систему координат, с осями Х (10), Y (11).
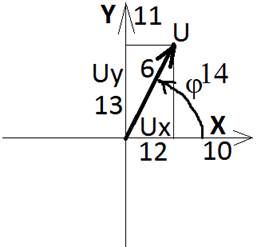
· Проекции векторов Ua (7), Ub (8), Uc (9) на оси Х (10), Y (11) создают координаты Ux (12), Uy (13) вращающегося вектора U (6), который имеет угол φ (14) относительно оси Х (10).
Сущность изобретения заключается в следующем. Принцип работы промышленных трехфазных сетей 50 герц связан с подачей на двигатель трехфазного напряжения Ua (7), Ub (8), Uc (9). Токи, протекающие по катушкам фаз A (1), В (2), С (3) статора 4 двигателя, к которым подключено трехфазное напряжение Ua (7), Ub (8), Uc (9), создают в роторе 5 двигателя вращающееся поле U (6), последнее и вращает ротор 5 двигателя.
Соответственно частотой F трехфазной сети является частота вращения поля U (6), угол φ (14) которого относительно оси Х (10) непрерывно увеличивается с вращением поля U (6). Увеличение угла φ (14) на угол 2π происходит за один оборот поля U (6), или за период Т частоты F=1/T. Подсчитав скорость изменения угла φ (14) найдем частоту F трехфазного напряжения Ua (7), Ub (8), Uc (9).
Координаты Ux (12), Uy (13) вращающегося вектора U (6) получаются из проекций векторов Ua (7), Ub (8), Uc (9) на оси Х (10), Y (11):
Ux = (Uc – Ub)·√3/2,
Uy = Ua – (Ub+ Uc)/2
Модуль (длина) вектора U (6) определяется из координат Ux (12), Uy (13):
U = √( U2x + U2y)
Для определения частоты F трехфазного напряжение Ua (7), Ub (8), Uc (9) в микропроцессорных терминалах используются цифровые сигналы всех трех фаз Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=(ti - ti-1 ). Причем величина dt значительно меньше периода T наибольшей частоты Fв=1/T диапазона измерения частоты F, dt<<T.
В каждый момент времени ti определяется проекция Ux(ti) на ось абсцисс Х вращающегося поля U(ti), создаваемого тремя фазами Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, по формуле:
Ux(ti)=  ,
,
определяется проекция Uy(ti) на ось абсцисс Y вращающегося поля U(ti):
Uy(ti)=  ,
,
определяется модуль вращающегося поля U(ti):
U(ti)=  ,
,
определяется зависимость от времени ti приращение фазы dφi вращающегося поля U(ti) за интервал dt=(ti - ti-1 ), по формуле:
|dφi |= |φ(ti) - φ(ti-1)|= 
Приращение dφi , вычисляемое с использованием тригонометрической функции arcos(), будет всегда положительным. Поэтому для определения знака dφi проведем дополнительные вычисления.
· Если | Ux(ti)| ≤ | Uy(ti)|, то знак dφi равен знаку величины
Uy(ti) · [Ux(ti-1)-Ux(ti)],
· Если | Ux(ti)| > | Uy(ti)|, то знак dφi равен знаку величины
Ux(ti) · [Uy(ti)-Uy(ti-1)].
Для повышения точности измерения частоты F(ti) определяется среднее за интервал времени n·dt значение частоты F(ti) в момент времени ti, по формуле:
F(ti) = (  )/(2π·n·dt), где n – целое значение.
)/(2π·n·dt), где n – целое значение.
Л.3. Вопрос №1-2. Метод вращающегося поля для однофазного напряжения
Методом синхронного детектирования (квадратурный детектор, или определение первой гармоники методом Фурье преобразования) из однофазного напряжения получаем его представление в виде идеальной синусоиды.
Сигнал S(t) называется периодическим, если все его значения повторяются через промежуток времени k*T, где T – наименьший период повторения сигнала, k – целое значение. Такой сигнал можно разложить в гармонический ряд Фурье:


где:  (1) – постоянная составляющая сигнала,
(1) – постоянная составляющая сигнала,  (2) – циклическая частота первой гармоники, обратно пропорциональна периоду сигнала,
(2) – циклическая частота первой гармоники, обратно пропорциональна периоду сигнала,
 (3)
(3)
 (4)
(4)
U=Uo*sin(ɷ*t+φ),
где Uo – амплитуда вращающегося с частотой ɷ вектора, со сдвигом фазы φ.
или в комплексном виде:
U= Re(X)+j*Im(X),
где Re(X) и Im(X) проекции вращающегося вектора на реальную и мнимую оси.
U2o= Re2(X) + Im2(X)
Re(X) = Uo*cos(φ)
Im(X) = Uo*sin(φ)
Тогда можем найти частоту:
φ = arctg(Im(X)/ Re(X))
Производная от арктангенса arctg(x) это 1/(1+x^2).
Производная от сложной функции g(f(t)) это g’(f) * f’(t).
Ну и производная от частного u(t)/v(t) это (u’*v - v’*u)/v^2
Если все это учесть, получаем следующее:
φ’ = 1/(1+Im(X)^2/Re(X)^2) * (Im’(X)*Re(X) – Re’(X)*Im(X)) / Re(X)^2
φ’ = Re(X)^2 / (Re(X)^2 + Im(X)^2) * (Im’(X)*Re(X) – Re’(X)*Im(X)) / Re(X)^2
φ’ = (Im’(X)*Re(X) – Re’(X)*Im(X)) / |X|^2
Из производной угла найдем частоту:
ɷ= φ’/2π либо ɷ= ɷo + φ’/2π (если при подсчете Фурье преобразования время будет непрерывно возрастать)
где ɷo – опорная частота, при которой подсчитывается Re(X) и Im(X).

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы