 |
Главная |


Исследование структуры пространственного рычажного механизма
|
из
5.00
|
(вторая задача)
1.2.1. Краткие сведения из теории
К пространственным механизмам относятся манипуляторы и робо-
ты [2].
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека. Механизм манипулятора образован из пространственной незамкнутой кинематической цепи. Первые конструкции манипуляторов не только по назначению, но и по внешнему виду напоминали руку человека. В дальнейшем появились манипуляторы с большим числом звеньев и кинематических пар, и внешнее сходство с рукой человека стало утрачиваться. Применяются манипуляторы в условиях, исключающих присутствие человека возле перемещаемого изделия (радиоактивность, вакуум, повышенное давление и т. п.).
Промышленные роботы - это манипуляторы с автоматическим управлением. В промышленных роботах применяются механизмы, образованные из не-
замкнутых кинематических цепей, а значит, возможна быстрая переналадка ихна выполнение другой программы.
Пространственные механизмы имеют кинематические пары третьего, четвертого и пятого классов. При анализе их структуры необходимо обнаружить так называемые кинематические соединения,т. е. кинематическую цепь, конструктивно заменяющую в механизме кинематическую пару. Например, сферическую кинематическую пару с пальцем можно заменить кинематическим соединением с двумя кинематическими парами пятого класса, а сферическую - с тремя (табл. 1.4).
Таблица 1.4
Кинематические соединения
| Число степеней свободы | Кинематическое соединение | Эквивалентная кинемати- ческая пара | ||
| название | схема | название | схема | |
| Двухподвижное сферическое | 
| Сферическая с пальцем | 
| |
| Трехподвижное сферическое | 
| Сферическая | 
|
Характерным признаком кинематического соединения является то, что оси образующих его кинематических пар пересекаются. Изготовить такое соединение легче и технологичнее.
Степень подвижности манипулятора или робота определяется по формуле Сомова-Малышева (1.1), но следует иметь в виду, что в конце свободной ветви находится захват, состоящий из двух звеньев. Эти звенья осуществляют зажим детали, и их движение не имеет отношения к перемещению остальных звеньев, поэтому захват рассматривается как одно звено и кинематическая пара внутри него при определении степени подвижности не учитывается.
| В механизме, схема которого приведена на рис. 1.11, звено 3 при исследовании структуры необходимо объединить со звеном 3' и считать их как одно звено. |  Рис. 1.11
Рис. 1.11
|
1.2.2. Пример решения второй задачи
1) Выбираем во своему варианту из прил. 2 схему механизма.
2) Вычерчиваем схему механизма (рис. 1.12).
 Рис. 1.12
Рис. 1.12
|  Рис. 1.13
Рис. 1.13
|
3) Проверяем наличие кинематических соединений: кинематические пары В и С составляют кинематическое соединение (см. табл. 1.3).
4) Определяем степень подвижности (число степеней свободы) данного механизма по формуле:

| (1.4) |
где n = 4 (число подвижных звеньев);
р5 = 3 (число кинематических пар пятого класса);
р4 = 1 (число кинематических пар четвертого класса);
q = 0 (число общих условий связи);
р3, р2 и р1 - нет кинематических пар третьего, второго и первого класса.

5) Определяем маневренность m манипулятора, т. е. число степеней свободы при неподвижном захвате (рис. 1.13), по формуле:
 (1.5)
(1.5)
Закрепляем захват, тогда n = 3; р5 = 3; р4 = 1.
Задаем общее условие связи: q = 1;
Вычисляем маневренность манипулятора:

т. е. нет возможности вращаться захвату в плоскости чертежа, и каждому его положению соответствует единственное расположение всех звеньев.
1.2.3. Вопросы для самопроверки
1) В чем отличие манипулятора от робота?
2) Что называется кинематическим соединением?
3) Что является характерным признаком кинематического соединения?
4) Что подразумевается под маневренностью манипулятора?
5) Где в практике применяются роботы и манипуляторы?
1.3. Кинематическое исследование плоского четырехзвенного рычажного механизма(третья задача)
1.3.1. Краткие сведения из теории
Кинематическое исследование состоит в изучении движения отдельных точек (звеньев) механизма независимо от сил, вызывающих это движение [3].
Основные задачи кинематического исследования заключаются в определении:
1) положений всех звеньев при любом положении ведущего звена;
2) траекторий движения точек звеньев;
3) линейных скоростей и ускорений точек звеньев;
4) угловых скоростей и ускорений точек звеньев.
При изучении теоретического материала первые две задачи не представляют особой сложности, рассмотрим две последние.
Зная закон движения ведущего звена и длину каждого звена механизма, можно определить значения и направления скорости и ускорения его точек путем построения планов скоростей и ускорений, эти значения необходимы при определении производительности и мощности машины, потерь на трение, при расчете на прочность и устойчивость механизма и для решения других задач.
Построение планов скоростей и ускорений следует выполнять после изучения их свойств. Кроме того, необходимо знать, что относительная скорость при вращательном движении всегда направлена перпендикулярно к звену в сторону его угловой скорости, а при поступательном движении - по направлению движения (параллельно направляющей).
При построении планов ускорений следует помнить о том, что кривошип вращается равномерно, а значит, точка на нем имеет только нормальное ускорение, направленное по звену к центру его вращения. Звенья, двигающиеся неравномерно, имеют кроме нормального ускорения (направленного также по оси звена к центру вращения в относительном движении) еще и тангенциальное ускорение, перпендикулярное к нормальному в сторону углового ускорения звена.
Зная ускорения звеньев, можно определить значения и направления сил инерции звеньев, которые иногда могут быть разрушительными для механизма (см. динамический анализ механизма).
1.3.2. Пример решения третьей задачи
1) Выбираем по своему варианту из прил. 3 схему механизма.
2) Вычерчиваем кинематическую схему в масштабе в заданном положении (рис. 1.14, а), обозначенном углом α положения кривошипа (следует обратить внимание на ось, от которой откладывается угол α). Все размеры звеньев заданы в миллиметрах. Принимаем длину кривошипа на чертеже в пределах
25 - 40 мм и определяем масштабный коэффициент kl. Для этого надо разделить истинное значение длины кривошипа в метрах на длину, принятую на чертеже, в миллиметрах:
| (1.6) |
3) Определяем размеры всех звеньев механизма, разделив их истинные значения размеров на масштабный коэффициент. Так, длина звена lАВ на чертеже определится по формуле, мм:
| ||

| ||
| а | ||
| 
| |
| б | в |

Рис. 1.14
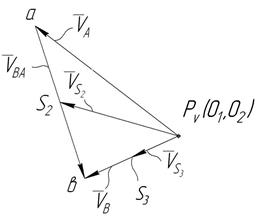
4) Построение плана скоростей начинаем с расчета угловой скорости кривошипа О1А (рис. 1.14, б) по формуле, 1/с:

| (1.8) |
где n1 - частота вращения кривошипа, об/мин (см. задание).
Находим скорость точки А кривошипа, м/с:
 , (1.9)
, (1.9)
где  - длина кривошипа (из задания).
- длина кривошипа (из задания).
Вектор скорости точки А (  ) направлен перпендикулярно к оси звена О1А в сторону его вращения. Задавшись длиной отрезка
) направлен перпендикулярно к оси звена О1А в сторону его вращения. Задавшись длиной отрезка  (произвольно, в пределах 80 - 100 мм), который на плане будет изображать вектор скорости , определяем масштабный коэффициент плана скоростей, м/с∙мм-1:
(произвольно, в пределах 80 - 100 мм), который на плане будет изображать вектор скорости , определяем масштабный коэффициент плана скоростей, м/с∙мм-1:
 . (1.10)
. (1.10)
Из произвольной точки Рv, в которой помещены и точки опор О1 и О2, откладываем перпендикулярно к звену О1А отрезок , направив его в сторону вращения кривошипа (рис. 1.14, б).
Из курса теоретической механики известно, что скорость любой точки звена может быть представлена в виде геометрической суммы переносной и относительной скоростей. Для дальнейшего построения плана скоростей и определения скорости точки В составляем уравнения:
 ; (1.11)
; (1.11)
 , (1.12)
, (1.12)
где  - скорость точки А, известна по значению и направлению;
- скорость точки А, известна по значению и направлению;
 - относительная скорость точки В во вращении вокруг точки А;
- относительная скорость точки В во вращении вокруг точки А;
 - скорость точки О2 (опоры), равна нулю;
- скорость точки О2 (опоры), равна нулю;
 - относительная скорость точки В во вращении вокруг точки О2.
- относительная скорость точки В во вращении вокруг точки О2.
Относительные скорости  и
и  известны только по линии их дейст-
известны только по линии их дейст-
вия:  перпендикулярна к звену механизма АВ и проводится на плане из точки а (конец вектора
перпендикулярна к звену механизма АВ и проводится на плане из точки а (конец вектора  );
);  перпендикулярна к звену ВО2 и проводится на
перпендикулярна к звену ВО2 и проводится на
плане из точки О2 (полюс плана скоростей РV). На пересечении этих двух линий действия получим точку b - конец вектора скорости  точки В. Направление скорости
точки В. Направление скорости  определяется направлением вектора
определяется направлением вектора  .
.
Вектор  изображает скорость
изображает скорость  точки В в относительном вращении вокруг точки А.
точки В в относительном вращении вокруг точки А.
Исходя из теоремы подобия (см. свойства плана скоростей), находим на плане точки S2 и S3, соответствующие центрам тяжести звеньев 2 и 3, и, соединив эти точки с полюсом плана скоростей РV, получим векторы скоростей этих звеньев -  и
и  .
.
С помощью масштабного коэффициента kV определяем скорость всех точек механизма, м/с:
 ; (1.13)
; (1.13)
 ; (1.14)
; (1.14)
 ; (1.15)
; (1.15)
 ; (1.16)
; (1.16)
 . (1.17)
. (1.17)
Чтобы определить угловую скорость, 1/с, звеньев 2 и 3, надо их относительную скорость разделить на длину звена, м (из задания):
 (1.18)
(1.18)
 (1.19)
(1.19)
Направление скорости ω2 (см. рис. 1.14, а) будет соответствовать направлению вектора  перенесенного мысленно в точку В звена при предположении, что точка А неподвижна.
перенесенного мысленно в точку В звена при предположении, что точка А неподвижна.
Направление скорости ω3 относительно точки О2 звена 3 определяется аналогично.
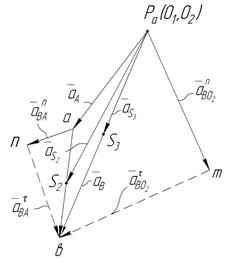
5) Построение плана ускорений начинаем с определения ускорения точки А кривошипа. Так как звено АО1 вращается равномерно, то точка А имеет только нормальное ускорение, направленное по звену АО1 к центру вращения
О1, м/с2:
 (1.20)
(1.20)
Приняв произвольно (в пределах 80 - 100 мм) длину отрезка  ,
,
изображающего вектор ускорения  точки А, определяем масштабный коэффициент плана ускорений, м/с2∙мм-1:
точки А, определяем масштабный коэффициент плана ускорений, м/с2∙мм-1:
 . (1.21)
. (1.21)
Из произвольной точки Ра, принятой за полюс плана ускорений, откладываем параллельно звену О1А в направлении от точки А к точке О1 (на механизме) отрезок (рис. 1.14, в).
По аналогии с планом скоростей составляем уравнения для определения ускорения точки В:
 ; (1.22)
; (1.22)
 . (1.23)
. (1.23)
Полные относительные ускорения  и
и  представляем в виде суммы составляющих – нормальной, направленной по оси соответствующего звена к
представляем в виде суммы составляющих – нормальной, направленной по оси соответствующего звена к
центру вращения в относительном движении, и тангенциальной, перпендикулярной к этому звену. Эти уравнения записываем в виде:
 ; (1.24)
; (1.24)
 . (1.25)
. (1.25)
В уравнениях (1.24) и (1.25) известны значение ускорения аА и его направление, ускорение  = 0 (опора). Определяем значения нормальных ускорений, м/с2:
= 0 (опора). Определяем значения нормальных ускорений, м/с2:
 ; (1.26)
; (1.26)
 . (1.27)
. (1.27)
С помощью масштабного коэффициента kа вычисляем значения векторов этих ускорений, мм:
 ; (1.28)
; (1.28)
 . (1.29)
. (1.29)
Из точки а на плане ускорений параллельно звену АВ в направлении от точки В к точке А по оси звена АВ откладываем вектор  (см. рис. 1.14, в), затем через его конец проводим перпендикулярно к звену АВ линию действия тангенциального ускорения
(см. рис. 1.14, в), затем через его конец проводим перпендикулярно к звену АВ линию действия тангенциального ускорения  (пунктирной линией). Из точки Ра параллельно звену ВО2 в направлении от точки В к точке О2 по оси звена ВО2 откладываем вектор
(пунктирной линией). Из точки Ра параллельно звену ВО2 в направлении от точки В к точке О2 по оси звена ВО2 откладываем вектор  , затем через его конец проводим перпендикулярно к звену ВО2 линию действия тангенциального ускорения
, затем через его конец проводим перпендикулярно к звену ВО2 линию действия тангенциального ускорения  (пунктирной линией). Точка пересечения линий тангенциальных ускорений будет искомой точкой в, соединив ее с полюсом плана, получим вектор ускорения точки В механизма.
(пунктирной линией). Точка пересечения линий тангенциальных ускорений будет искомой точкой в, соединив ее с полюсом плана, получим вектор ускорения точки В механизма.
Просуммировав графически нормальные и тангенциальные ускорения, получим векторы полных относительных ускорений и (см. рис. 1.14, в).
С помощью масштабного коэффициента kа определяем ускорения всех точек механизма, м/с2:
 ; (1.30)
; (1.30)
 ; (1.31)
; (1.31)
 ; (1.32)
; (1.32)
 ; (1.33)
; (1.33)
 ; (1.34)
; (1.34)
 . (1.35)
. (1.35)
Угловое ускорение кривошипа О1А равно нулю, так как угловая скорость его постоянна.
Для второго звена (АВ) угловое ускорение определяем по формуле, 1/с2:
 ; (1.36)
; (1.36)
для третьего звена (ВО2) –
 . (1.37)
. (1.37)
Направление углового ускорения зависит от направления тангенциального: для звена АВ вектор  мысленно переносим в точку В (точка В вращается относительно точки А по ходу часовой стрелки), что и определяет направле-
мысленно переносим в точку В (точка В вращается относительно точки А по ходу часовой стрелки), что и определяет направле-
ние ε2. Угловое ускорение ε3 звена О2В направлено против хода часовой стрелки.
Если в механизме есть звенья, движущиеся поступательно (ползуны), то значения их угловых скоростей и ускорений равны нулю.
1.3.3. Вопросы для самопроверки
1) Какие задачи решаются в кинематическом исследовании механизмов?
2) Какие существуют методы кинематического исследования механизмов?
3) Что представляют собой планы скоростей и ускорений?
4) От чего зависит масштаб плана скоростей?
5) Как определяются значения ускорений из построенного плана ус-корений?
6) Как определяются направления угловых ускорений звеньев механизма?
|
из
5.00
|
Обсуждение в статье: Исследование структуры пространственного рычажного механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы