 |
Главная |


Получение уравнений движения
|
из
5.00
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ
«Московский энергетический институт»
Кафедра «Мехатроники и теоретической механики»
ОТЧЕТ
о научно-исследовательской работе
| Студент аспирантуры 1 курса | Е.А. Антонов |
| ( Семестр: 1 ) | |
| по направлению | 01.06.01 «Математика и механика» |
| по специальности | Теоретическая механика |
| Научный руководитель: | В.В. Подалков |
| Должность, степень, звание | проф., доктор тех. наук. |
г. Москва 2016 г.
РЕФЕРАТ
Влияние малых нелинейных и нестационарных возмущений на динамику микромеханического гироскопа
Перечень ключевых слов: микромеханический гироскоп, нелинейные деформации, вынужденные колебания.
Объектами исследования и разработки в данной работе являются микромеханические устройства, в частности, гироскопы.
Целью данной работы является рассмотрение, математическое описание и анализ поведения микромеханического гироскопа в режиме вынужденных колебаний при наличии в системе нелинейных деформаций и их влияние на динамику резонатора.
Методы исследования в первую очередь определялись специфическими особенностями рассматриваемого гироскопа и его математической модели. В ходе исследования были использованы основы теоретической механики, метод малого параметра и осреднения, теория дифференциальных уравнений, системы и методы аналитического и матмоделирования. Были использованы системы символьных вычислений Maple и Mathematica.
Результаты работы:
В ходе работы был рассмотрен микромеханический гироскоп L-L типа, для которого была составлена математическая модель. В рамках принятой математической модели было проанализировано влияние медленно меняющихся параметров, в частности, частоты внешней силы и рассмотрено влияние нелинейности.
Содержание
Введение 5
Основная часть проведенной работы 7
Постановка задачи 7
Получение уравнений движения 7
Анализ динамики резонатора 8
Числовой пример 9
Заключение11
Список литературы12
Введение
Последние десятилетия проходят под знаком интенсивного развития микросистемной техники. Такая техника, в свою очередь, требует высокоточных и миниатюрных датчиков, качественных и эффективных микродвигателей, качественных преобразователей и т.д. В данной отрасли широкое применение находят микромеханические гироскопы. Их развитие, а именно нахождение новых технологических схем и решений, получение высокой точности при малых размерах и массы – довольно сложная и актуальная проблема на сегодняшний день [7, 12, 17, 19, 21, 23].
Микромеханические гироскопы (ММГ) имеют огромный потенциал, что позволяет им господствовать на рынке из-за своих малых размеров и малого энергопотребления. Это один из наиболее быстро растущих сегментов современного рынка. Область применения микромеханических гироскопов интенсивно расширяется. Сейчас эти устройства можно найти во многих приборах современного мира: от бытовой техники и игровых устройств до аэрокосмической промышленности [14 - 16, 20, 22].
На сегодняшний день актуальна задача проектирования и создания новейших систем навигации [3, 4] и систем управления на основе довольно интересного класса инерциальных датчиков – микромеханических гироскопов L-L типа.
В работе [13] С.П. Тимошенковым и его соавторами был рассмотрен ММГ L-L типа. Представлен совершенно уникальный вариант геометрии, позволяющий использовать его в системах, управляющих высокоскоростными вращающимися объектами. Полученные в работе математические модели делают возможным анализ динамики чувствительного элемента.
Влияние нелинейных динамических эффектов на поведение микромеханического гироскопа L-L типа описано в статье А.М. Лестева и А.В. Ефимовской [9]. Сделаны выводы по части устойчивости инерциальной массы, а конструкция с двумя инерциальными массами имеет самую высокую степень стабильности технических характеристик.
Также влияние нелинейных эффектов на динамику гироскопов подробно разобраны в работах [8, 10, 11, 18].
Данная работа продолжает изложенные в статье [1] исследования динамики ММГ с чувствительным элементом в виде массы, закрепленной на упругом подвесе.
Основная часть проведенной работы
Постановка задачи
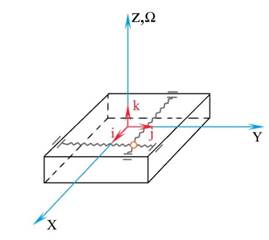
Конструкция рассматриваемого микромеханического гироскопа представлена на рисунке 1:
|
| Рисунок 1 – Модель ММГ |
Она представляет собой точечную массу 1 (резонатор), закрепленную в рамке с помощью упругих торсионов, моделируемых пружинами жесткости c. Торсионы, в свою очередь, обеспечивают резонатору одну степень свободы вдоль оси Y и одну степень свободы вдоль оси X (рис. 1).
Целью данной работы является изучения влияние нелинейных деформаций на динамику микромеханического гироскопа в режиме вынужденных колебаний на подвижном основании.
Получение уравнений движения
Кинетическая энергия системы имеет следующий вид:

где: x, y – координаты точечной массы в системе координат, связанной с рамкой; m - масса системы; Ω - угловая скорость основания, на которое помещен гироскоп.
Удельная потенциальная энергия деформации системы записывается следующим образом:

где c – жесткость торсионов; d – параметр, характеризующий нелинейные упругие свойства резонатора.
В таком случае лагранжиан системы равен:
 (1)
(1)
Используя формализм Лагранжа и учитывая, что на систему действует внешняя вынуждающая сила, моделируемая гармоникой fcosψ, получим дифференциальные уравнения движения чувствительного элемента микромеханического гироскопа:
 (2)
(2)
|
из
5.00
|
Обсуждение в статье: Получение уравнений движения |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы