 |
Главная |


Пример работы в среде GUI
|
из
5.00
|
Работу с интерфейсом рассмотрим на примере. В режиме командной строки введем команду
» load dryer2
Выполнение команды приводит к загрузке в рабочую среду MATLAB массивов данных u2 (входные данные) и у2 (выходные данные), относящихся к такому объекту исследования, как фен (устройство для сушки волос), при этом u2 — тепловая мощность, а у2 — температура нагретого воздуха.
В верхнем левом углу окна выберем в раскрывающемся списке Data (Данные) опцию Import. Это приведет к открытию диалогового окна, показанного на рис. 4.2. Введем в нем имя u2 в поле Input (Вход), у2 -- в поле Output (Выход), в поле Starting Time (Начальное время) 0, в поле Samp, inter. (Интервал дискретизации) зададим интервал дискретизации 0.08, а в строке Data name (Имя данных) укажем произвольное название, например Fen. Затем нажмем кнопку Import. Далее нажатием кнопки Close закроем окно импорта данных.
Указанные действия приведут к появлению в верхнем левом углу окна интерфейса значка в виде цветной линии, сопровождаемого надписью «Фен». Это означает, что импортируемые данные введены в среду интерфейса. Сообщения об этих данных также появляются в значках Working Data (Рабочие данные) и Validation Data (Данные для проверки модели)
Проведем исследование исходных данных, для чего установим флажок Time plot (Временной график) в левой нижней части окна интерфейса. Почти сразу появится графическое окно, содержащие графики входного и выходного сигналов u2(t) и y2(t) (рис. 4.3). Заметим, что меню окна имеет ряд опций, позволяющих достаточно подробно изучать вид входных и выходных сигналов.

Рис. 4.2. Диалоговое окно импорта данных

Рис. 4.3 Временные диаграммы сигналов.
Закроем окно Time plot и вернемся в основное окно интерфейса. Теперь проведем предварительную обработку сигналов исследуемого объекта, исключив из них постоянную составляющую. С этой целью активизируем раскрывающийся список Preprocess (Предварительная обработка) и выберем в нем опцию Remove means (Удалить среднее).
Результатом операции явится появление в одном из значков Data Views (Вид данных) в левой верхней части окна интерфейса информации о новых данных с именем Fend. Можно опять активизировать окно Time plot и увидеть, что там появилось изображение двух новых сигналов, отличающихся от исходных отсутствием постоянной составляющей. Для их более удобного просмотра целесообразно воспользоваться командой меню окна Options | Autorange (Автоматическое масштабирование). Чтобы просмотру не мешали исходные графики, можно убрать их, просто щелкнув мышью на значке с их представлением (в левой верхней части окна интерфейса), при этом сразу изменится и масштаб изображения.
Приступим теперь к построению модели, принимая в качестве данных для ее построения данные Fend. Перетянем их мышью в область Working Data (в центре окна интерфейса). Если мы теперь хотим получить какую-то информацию об этих данных или изменить что-либо (например, их имя), щелкнем мышью дважды на соответствующем значке в группе Data Views. Появится диалоговое окно, показанное на рис. 4.4. Изменим, имя данных, например, на FenM и закроем данное окно.

Рис. 4.4
Активизируем теперь опцию Select Range (Выбор диапазона) из списка Preprocess. Это приведет к появлению окна, показанного на рис. 4.5. Диапазон можно задать либо в текстовом окошке Time span (Временной диапазон), либо с помощью мыши — выделяя прямоугольную область точно так же, как это проводилось для окна Time plot. Любым из этих способов укажем диапазон от 1 до 50 с и нажмем кнопку Insert (Вставить). Результат проделанной операции отразится появлением значка, символизирующего эти (усеченные) данные (с именем Fene) в окне интерфейса. Повторим операцию задания диапазона с целью формирования данных для проверки модели — например, из оставшейся части начального диапазона, в результате чего появится еще один значок данных с именем Fendv. Закроем окно выбора диапазона.

Рис. 4.5. Окно выбора диапазона
С помощью мыши перетащим данные Fende в область Working Data, а данные Fendv — в область Validation Data (заметим, что если на каком-то этапе работы с данными допущена ошибка и мы хотим удалить неправильные данные, необходимо просто перетащить их мышью на значок Trash (Мусор) в центральной нижней части окна интерфейса, и они исчезнут).
Теперь можно приступать к нахождению оценки модели выбранного вида. Начнем с оценивания переходной функции объекта. В раскрывающемся списке Estimate (Оценивание) выберем опцию Correlation Model (Корреляционная модель), что приведет к появлению соответствующего диалогового окна с единственной строкой ввода. В ней можно задать данные фильтра, но в данном случае ничего не будем делать, только нажмем в нем кнопку Estimate (Оценить), после чего окно можно закрыть.
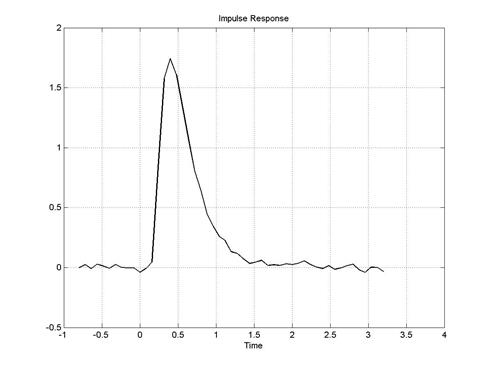
А в основном окне интерфейса в его правой части (Model Views — Вид моделей) при этом появится значок с надписью imp, означающий, что выбранная модель построена. Чтобы увидеть результат, установим флажок Transient resp (transient response переходная функция) и увидим в появившемся окне (рис. 4.6) график переходной функции исследуемого объекта, найденной описанным выше корреляционным методом.

Рис. 4.6. Оценка переходной функции исследуемого объекта, найденная корреляционным методом
Используя команду Options | Impulse response меню данного окна, вместо графика переходной функции можно вывести график импульсной характеристики.
Оценим модель следующего вида — частотные характеристики объекта. Выберем в списке Estimate опцию Spectral model и повторим только что проделанные операции по нахождению оценки модели. В результате в основном окне интерфейса (в его правой части -- Model Views) появится еще один значок с именем spad, символически представляющий модель в виде частотных характеристик, найденных спектральным методом. Результат отображается активизацией графического окна Frequency resp (Frequency response — частотные характеристики), показанного на рис. 4.7.

Рис. 4.7. Частотные характеристики, найденные спектральным методом.
Перейдем теперь к оцениванию параметрических моделей, выбрав в списке Estimate опцию Parametric models. Данный выбор приведет к открытию диалогового окна задания структуры модели (рис. 4.8).
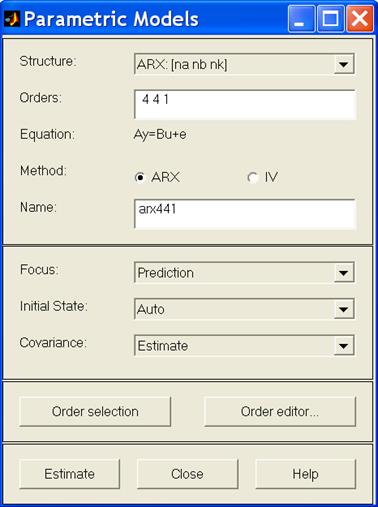
Рис. 4.8. Диалоговое окно задания структуры модели
По умолчанию пользователю предлагается модель типа ARX (см. выше) с параметрами па = 4, nb = 4, nk = 1. Можно согласиться или не согласиться с данными значениями. В последнем случае параметры можно изменить непосредственно в строке окна или с помощью редактора порядка модели (Order editor), вызываемого нажатием соответствующей кнопки. Можно вообще выбрать другую параметрическую модель, воспользовавшись раскрывающимся списком в верхней части окна (возможный выбор — модели типа ARX, ARMAX, OE, BJ, State Space и модель, задаваемая пользователем).
В рассматриваемом примере сохраним значения по умолчанию (ARX, 4, 4, 1) и нажмем кнопку Estimate (Оценить). Результатом действия будет появление значка модели с названием агх441.
Воспользовавшись далее возможностями редактора порядка модели (Order editor), зададим теперь ARX-модель с параметрами па = 2, nb = 2, nk = 3 (последнее означает наличие в объекте запаздывания с величиной nk х Т = 3 х 0.08 = 0.24 с) и повторим операцию оценивания. Это приведет к появлению значка еще одной модели с именем агх223 (рис. 4.11).
Для сравнения полученных моделей активизируем окно Transient resp . В нем будут отображены графики переходных процессов, соответствующие трем построенным моделям — корреляционной (crad), arx441 и агх223.

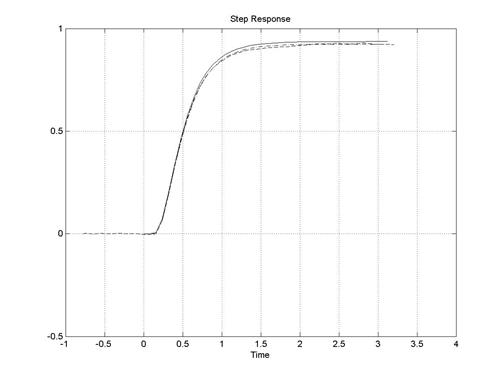
Рис 4.9. Оценки переходного процесса для трех построенных моделей.
Заметим, что однократный щелчок левой кнопкой мыши на графике модели в ее значке приведет к исчезновению соответствующего графика переходного процесса; повторный щелчок восстанавливает изображение. Двойной щелчок мыши на значке приводит к открытию окна с информацией о модели.
Вернемся к окну Transient resp. Оставляя в нем только по одному графику (то есть, убирая остальные, как это описано выше), активизируем команду его меню Options | Show 99% confidence intervals (Показать 99%-й доверительный интервал). Просмотрим последовательно переходные процессы с доверительными интервалами для трех построенных моделей crad, агх441 и агх332. Сравнение покажет, что первая модель является наименее точной, а вторая и третья дают примерно одинаковые результаты.
В качестве итоговой, при прочих равных условиях, можно выбрать более простую модель, а таковой здесь является (по числу оцениваемых коэффициентов) модель агх332.
Есть и еще один способ сравнения параметрических моделей — путем активизации графического окна Model output (соответствующий флажок расположен в средней нижней части окна интерфейса). Вид окна Model output для выбранных моделей агх441 и агх332 приведен на рис. 4.10.
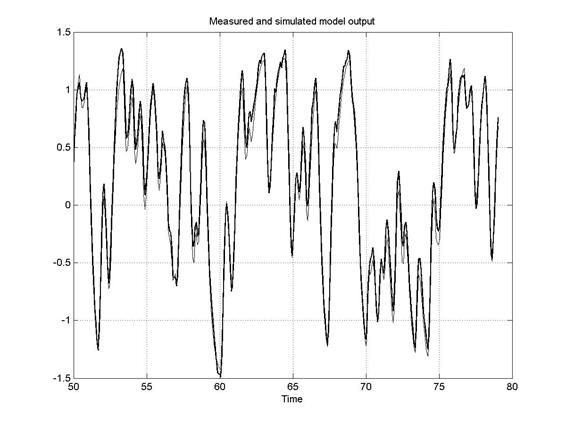
Рис. 4.10
В левой части данного окна приведены выходы объекта и указанных моделей, а в правой — величины, отражающие меру совпадения (среднеквадратичное рассогласование) экспериментальных и прогнозируемых данных. Как видно, несколько точнее оказывается модель агх441 (хотя и ненамного).
Возвратимся к процедуре оценивания параметрических моделей. Выберем структуру вида State Space. В появляющемся диалоговом окне задания структуры модели по умолчанию предлагается модель 4-го порядка (используется обновленная форма модели для переменных состояния — см. выше). Можно, конечно, с этим согласиться, но можно избрать поисковый метод определения наилучшей структуры (порядка) модели, указав в строке Orders (Порядок) диапазон возможных значений порядка модели, например 1:10. Проделав это и нажав кнопку Estimate, в качестве результата выполненного действия получим открывшееся окно выбора порядка модели (рис. 4.11).

Рис. 4.11. Окно выбора порядка модели
График показывает вклад и-й составляющей вектора переменных состояния в выходной сигнал модели (значения п указаны по оси абсцисс). Целесообразно выбирать значение n таким, чтобы столбцы, соответствующие составляющим с номерами больше n, имели бы намного меньшую высоту, чем столбцы, расположенные слева от них. В рассматриваемом случае можно остановиться на п = 4.
Возвратимся далее в окно задания структуры модели и нажмем кнопку Estimate. Результатом явится появление значка новой модели с именем n4s4. Данную модель можно исследовать так же, как и полученные ранее модели.
Для анализа моделей графический интерфейс пакета System Identification представляет весьма значительные возможности, среди которых отметим только возможность просмотра переходной функции модели с помощью программы LTI Viewer
Сохранение построенных моделей производится в два этапа:
· сначала модель вводится в рабочее окружение системы MATLAB (перетаскиванием значка модели в область То Workspace в центре рабочего окна интерфейса), при этом модель будет фигурировать в рабочем пространстве MATLAB под тем же именем, что и в среде интерфейса;
· затем модель сохраняется командой сохранения в режиме командной строки (как любая переменная MATLAB).
Отметим, что можно сохранить все рабочее пространство интерфейса (при его закрытии даже появится соответствующая подсказка) в виде файла с расширением (по умолчанию) sid, при этом в следующем сеансе работы можно загрузить все полученные результаты.
Задание
1. Выбрать технологический объект и загрузить в рабочую среду MATLAB его массивов входных и выходных данных.
2. Провести идентификацию и исследование технологического объекта.
3. Сделать выводы.
Лабораторная работа № 5
Анализ системы автоматического регулирования уровня воды в баке системы химводо подготовки.
Цель работы
Исследование ситемы автоматического регулирования технологического процесса в среде MATLAB.
Описание системы[1]
Объектом анализа является блок подпитки теплосетей цеха. Он реализует технологический процесс химической очистки воды. В процессе химводоочистки осуществляется подготовка воды для системы водоснабжения.
Схема объекта приведена на рис. 5.1.
Система состоит из блока фильтров, бака химочищенной воды (БХОВ), регулирующих заслонок с постоянной скоростью перемещения.
Вода для очистки поступает на блоки фильтров. После фильтра качество воды заведомо выше требуемого, поэтому необходимо к полученной воде подмешивать питьевую воду. Результатом подмеса является не только достижение заданного качества воды, но так же экономия и продление срока службы фильтрующего материала. Затем химически очищенная вода собирается в БХОВ, в котором поддерживается постоянный уровень.
В процессе работы блока подпитки теплосети нагрузка блока изменяется случайным образом. Поэтому в задачи системы автоматического управления входит поддержание постоянного уровня в баке ХОВ (4±1 м). Кроме этого, система должна обеспечивать заданное качество ХОВ путём поддержания постоянного соотношения между расходами фильтрата и подмеса с помощью регулируемой заслонки на подмесе.

Рис 5.1- Схема объекта.
Модель объекта представлена на рис.5.2.
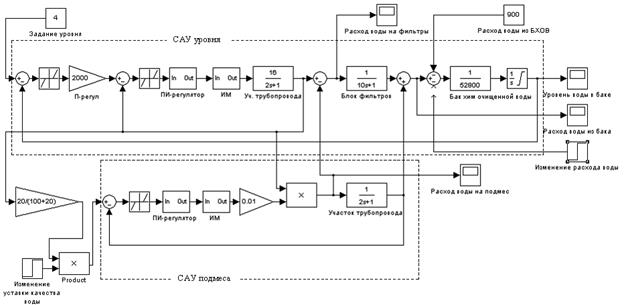
Рис.5.2. Модель объекта.
В роли исполнительного механизма (Рис.5.3) выступает регулируемый клапан с электроприводом с постоянной скоростью перемещения и обратной связью по положению. В результате идентификации можно получить передаточную функцию линейной части ИМ. Она имеет вид:  .
.

Рис. 5.3. Исполнительный механизм.

Рис.5.4 - Блок стабилизации положения регулирующей заслонки.
Для моделирования работы электропривода использована нелинейность типа гистерезисное реле с зоной нечувствительности. Ширина зоны гистерезиса определяется длительностью цикла контроллера, реализующего регулятор, поскольку изменение состояний выходов контроллера возможно не чаще чем один раз за цикл. Введение зоны нечувствительности позволяет исключить возникновения автоколебаний, которые могут возникнуть из-за прохождения зоны нечувствительности за одно включение.
Для реализации данной нелинейности использовалась комбинация трёх элементов: зона нечувствительности, сигнум, экстраполятор нулевого порядка. По техническим соображениям зона нечувствительности принята равной ±3%, время квантования соответствующее длительности цикла контроллера - 0,2 с. Так как задвижка не может открыться более чем на 100%, поэтому при моделировании ИМ был использован интегратор с ограничением от 0 до 100%.
В модели объекта можно выделить САУ уровня воды в БХОВ и САУ подмеса.
САУ уровня представляет собой двухконтурную систему подчиненного регулирования. Внутренний (быстродействующий) контур стабилизирует расход воды на блок фильтров. Внешний (медленный) контур поддерживает заданный уровень в БХОВ.
Для стабилизации расхода во внутреннем контуре используется ПИ-регулятор с зоной нечувствительности на входе. Зона нечувствительности на входе позволяет не допустить возникновения автоколебаний в системе. Внутренний контур охвачен жесткой единичной обратной связью. Выбран ПИ-регулятор, т.к. передаточная функция регулируемого объекта в контуре представляет собой апериодическое звено второго порядка. Ширина зоны нечувствительности принята по технологическим соображениям равной: ±15т/ч. Для расчета ПИ-регулятора, ИМ в модели САУ был заменен на апериодическое звено первого порядка, постоянная времени которого была найдена по АЧХ ИМ, и она имеет вид:

Коэффициенты ПИ-регулятора рассчитывались исходя из условия технического оптимума. ПИ-регулятор имеет вид:

Для моделирования системы стабилизации уровня в БХОВ к внутреннему контуру были добавлены: внешний объект - бак, П‑регулятор и зона нечувствительности (± 0,3 м). Вся система была охвачена жесткой единичной обратной связью по сигналу уровня в БХОВ. Во внешнем контуре используется П - регулятор, т.к. передаточная функция регулируемого объекта представляет собой интегрирующее звено. Настройка П ‑ регулятора производилась исходя из условий технического оптимума. Значение П ‑ регулятора равно:  . Но при моделировании совместной работы САУ подмеса и САУ уровня в БХОВ данного значения не достаточно, следовательно, принято
. Но при моделировании совместной работы САУ подмеса и САУ уровня в БХОВ данного значения не достаточно, следовательно, принято  . Идентификация была проведена по временным переходным характеристикам объектов управления снятых на работающем оборудовании. В её результате были получены передаточные функции для объектов управления: для участка трубопровода:
. Идентификация была проведена по временным переходным характеристикам объектов управления снятых на работающем оборудовании. В её результате были получены передаточные функции для объектов управления: для участка трубопровода:  , для БХОВ:
, для БХОВ:  , для блока фильтров . Для реализации передаточной функции БХОВ используется интегратор с ограничением от 0 до 6 м, т.к. бак имеет высоту 6 м, и соответственно уровень воды в нём не может превышать 6 м.
, для блока фильтров . Для реализации передаточной функции БХОВ используется интегратор с ограничением от 0 до 6 м, т.к. бак имеет высоту 6 м, и соответственно уровень воды в нём не может превышать 6 м.
Качество фильтрата на выходе с блока должно регулироваться путем добавления в фильтрат питьевой воды. При этом необходимо поддерживать определенное соотношение между расходом питьевой воды и отфильтрованной, которое обеспечивает заданное качество химочищенной воды.
САУ подмеса представляет собой одноконтурную систему подчиненного регулирования расхода воды на подмес. Для стабилизации расхода воды на подмес используется ПИ-регулятор с зоной нечувствительности на входе, т.к. передаточная функция регулируемого объекта представляет собой апериодическое звено.
В результате идентификации определена передаточная функция для участка трубопровода:  . Коэффициенты ПИ-регулятора рассчитывались исходя из условий технического оптимума. ПИ-регулятор имеет вид:
. Коэффициенты ПИ-регулятора рассчитывались исходя из условий технического оптимума. ПИ-регулятор имеет вид:
 .
.
Задание
1. Собрать схему (рис.5.2).
2. Провести моделирование объекта.
2.1. Получить переходные процессы в системе при задании уровня в БХОВ.
2.2. Получить изменение уровня в БХОВ.
2.3. Получить изменение расхода воды на подмес.
2.4. Получить изменение расхода воды на блок фильтров (рис.5.6).
2.5. Провести моделирование переходного процесса в системе при нанесении возмущения расходом воды из БХОВ (расход меняется с 900 т/час на 1200т/час).
3. Рассчитать коэффициенты ПИ-регулятора исходя из условия симметричного оптимума.
4. Провести моделирование (пп. 2.1 – 2.5).
5. Сравнить динамические характеристики, полученные в п.2 и п.3 и сделать выводы.
Лабораторная работа № 6
Автоматицированная система регулирования уровня воды в парогенераторе
Цель работы
Моделирование процессов в парогенераторе, проверка правильности расчета ручек чувствительности по каналам, предварительная настройка регулятора.
Описание работы[2]
Регулирование питания в каждом из парогенераторов (ПГ) сводится к поддержанию материального баланса между отводом пара, продувкой и подачей питательной воды. Параметром, характеризующим материальный баланс, является уровень воды в ПГ.
К стабилизации уровня предъявляются довольно жесткие требования. Для ПГ с ВВЭР-1000 номинальный уровень Lном составляет 2450 мм от внутренней образующей корпуса. Точность поддержания уровня в статических режимах составляет ±50 мм от Lном , в динамике ±150 мм от Lном (с учетом нечувствительности регулятора). Повышение уровня воды от Lном не допускается из-за затопления и нарушения работы сепарационных устройств (заброс воды в турбину), а снижение уровня - из-за оголения поверхности нагрева.
Возмущающими воздействиями на уровень являются:
· расход пара (нагрузка);
· изменение расхода питательной воды;
· изменение температуры питательной воды;
· изменение расхода продувки;
· изменение теплоподвода со стороны первого контура (изменение средней температуры первого контура или отключение ГЦН).
При возмущении расходом пара или отключении ГЦН проявляется явно выраженное "набухание" уровня, т.е. изменение его в начальные моменты времени в сторону, не соответствующую знаку возмущающего воздействия. Явление "набухания" можно объяснить так. При изменении расхода пара, например увеличении, давление в ПГ уменьшается, происходит дополнительное вскипание воды, увеличение уровня. В дальнейшем уровень начинает падать, поскольку расход пара увеличился, а расход питательной воды остался прежним. При отключении ГЦН теплоподвод в ПГ резко уменьшается, интенсивность кипения и объем пузырьков пара уменьшаются, что приводит к снижению уровня. Однако уменьшение парообразования приводит к снижению давления и некоторому увеличению парообразования. Тем не менее первый фактор более существенный. В дальнейшем уровень увеличивается, поскольку расход питательной воды остался неизменным.
Рассмотренные динамические свойства ПГ являются крайне неблагоприятными с точки зрения стабилизации уровня воды. Этим объясняется тот факт, что для автоматического регулирования уровня не пригодны обычные одноконтурные системы регулирования.
Динамику ПГ по уровню по всем входным возмущениям можно описать произведением передаточных функций интегрального и интегро - дифференцирующих звеньев. Эту передаточную функцию можно представить суммой передаточных функций инерционного и интегрального звеньев.
Применение пропорционально-интегрального (ПИ) закона регулирования для астатического объекта с явлением "набухания" не обеспечивает требуемого качества регулирования (длительные слабо затухающие колебания уровня при ступенчатом входном возмущении). Интегральный (И) закон также дает плохую устойчивость системы. Пропорциональный (П) закон не допустим из-за статической ошибки регулирования. Поэтому для регулирования уровня в ПГ применяют комбинированную АСР: регулирование по отклонению с П-регулятором и контуром инвариантности по основному возмущающему воздействию - расходу пара.
2-импульсная схема регулирования не применяется по следующим причинам:
1. Расход питательной воды через регулирующий питательный клапан зависит не только от положения клапана, но и от перепада давления на нем, который в процессе эксплуатации может изменяться;
2. В дифманометрах-расходомерах прежних лет выпуска выходной сигнал был пропорционален корню квадратному из перепада давления.
Указанные недостатки 2-контурной АСР устраняются введением в регулятор третьего импульса по расходу питательной воды от дифманометра - расходомера. Такая 3-импульсная АСР изображена на рисунке 6.1.
Принцип работы АСР следующий. Сигналы по расходу пара и питательной воды вводятся в регулятор с противоположными знаками. В установившемся состоянии эти сигналы равны, противоположны по знаку и, следовательно, компенсируют друг друга. Сигнал по уровню воды в ПГ компенсируется сигналом задания. При изменении расхода пара мгновенно изменяется соответствующий сигнал на входе в регулятор и последний пропорционально изменяет расход питательной воды, не дожидаясь изменения уровня.
В регуляторе используется ПИ-закон регулирования, однако вследствие ввода в регулятор практически безынерционной отрицательной обратной связи по расходу питательной воды в нем реализуется П-закон регулирования (аналогия жесткой обратной связи по положению регулирующего органа). Статическая неравномерность П - регулятора устраняется корректирующим сигналом по расходу пара.
Рис.6.1АСР уровня.
Экспериментальным путем были получены разгонные кривые парогенератора по уровню при подаче на него возмущений расходом питательной воды и расходом пара (Рис. 6.2, 6.3).

Рис. 6.2 - Кривая разгона ПГ по уровню при подаче скачкообразного возмущения расходом питательной воды DG = 10 кг/с
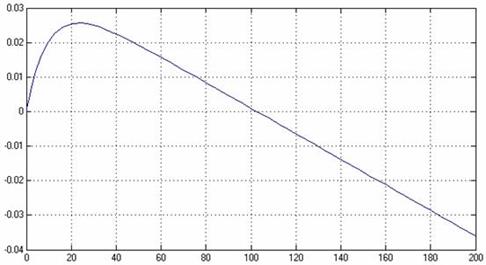
Рис. 6.3 - Кривая разгона ПГ по уровню при подаче скачкообразного возмущения расходом пара DD = 10 кг/с
Данные свойства парогенератора можно описать суммой передаточных функций инерционного и интегрального звеньев, а коэффициенты определить экспертно-опытным путем при помощи Matlab. Структурная схема модели представлена на рис. 6.4.

Рис. 6.4 - Структурная схема модели парогенератора
Уровень в ПГ измеряется датчиком типа Сапфир-22ДД по малому уровнемеру с пределом измерения 0-1000 мм, используя двухкамерный уравнительный сосуд. Статическая характеристика уровнемера приведена на рис. 6.5-а.
Расход воды измеряется по перепаду давления на сужающем устройстве типа "диафрагма" датчиком типа Сапфир-22ДД с выходным токовым сигналом 4 - 20 мА и пределами измерения 0 - 555 кг/с (0 - 2000 т/ч). Статическая характеристика расходомера приведена на рис. 6.5-б.
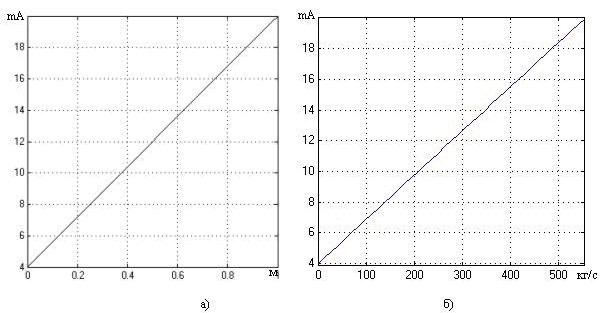
Рис 6.5
Расход пара оценивается по температуре и давлению в трубопроводе І контура до и после ПГ. Сигнал расхода пара подается в виде нормированного токового сигнала 4 - 20 мА с пределом измерения 0 - 555 кг/с (0 - 2000 т/ч). Статическая характеристика расходомера приведена на рис. 6.5-б. Таким образом, измерительные преобразователи можно описать передаточными функциями пропорциональных звеньев с коэффициентами передачи, которые равняются:
КипL = 16, mA/м - для измерения уровня воды в ПГ;
КипG = КипD = 0.0288, mA/(кг/с) - для измерения расходов питательной воды и пара соответственно.
Регулирование уровня воды осуществляется путем изменения расхода питательной воды через регулирующий питательный клапан, который осуществляет регулирование в пределах 0..100%.
Позиционер управляет приводом электродвигателя постоянного тока регулирующего питательного клапана. На позиционер поступает сигнал задания открытия клапана в виде нормированного токового сигнала 0..20мА. Максимальная скорость перемещения штока составляет 5%/с. Работа позиционера моделируется.
Расходная характеристика регулирующего питательного клапана приведена на рис. 6.6.
Рис. 6.6 - Расходная характеристика регулирующего питательного клапана
Как видно, расходная характеристика клапана близка к линейной. Таким образом, для моделирования расхода питательной воды через клапан по каналу "Степень открытия, % - расход на клапане, кг/с" можно описать пропорциональным звеном с коэффициентом пропорциональности Кро=6.67 (кг/с)/%. На вход звена должен подаваться сигнал положения штока в процентах хода РО (0-100 %хРО).
Трубопровод от клапана до парогенератора моделируется инерциальным звеном 1го порядка с коэффициентом передачи Ктр=1 и постоянной времени Ттр=2с.
По принципиальной схеме 3-импульсной АСР уровня, описанной в п.1.2 составляем структурную схему. Структурная схема модели 3-импульсной АСР питания ПГ представлена на рис. 6.7.

Рис. 6.7 - структурная схема модели 3-импульсной АСР питания ПГ
Задание
1. Собрать схему (рис. 6.7)
2. Провести моделирование объекта при различных величинах задания.
3. Сделать выводы.
Лабораторная работа № 7
Обработка экспериментальных данных с помощью пакета «Curve Fitting Toolbox»
Цель работы
Использование пакета «Curve Fitting Toolbox» для обработки экспериментальных данных технологических обектов.
|
из
5.00
|
Обсуждение в статье: Пример работы в среде GUI |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы