 |
Главная |


УСТОЙЧИВОСТЬ И ПРОДОЛЬНО-ПОПЕРЕЧНЫЙ ИЗГИБ СЖАТЫХ СТЕРЖНЕЙ
|
из
5.00
|
Исследование причин разрушения различных сооружений показало, что для надёжной работы конструкции под нагрузкой недостаточно сделать её элементы прочными, необходимо ещё обеспечить сохранение первоначальной формы равновесия как элементов, так и всей конструкции в целом.
Равновесие может быть:
· Устойчивое
· Безразличное
· Неустойчивое
Равновесие называется устойчивым, если при малом отклонении от положения равновесия система возвращается в первоначальное положение.
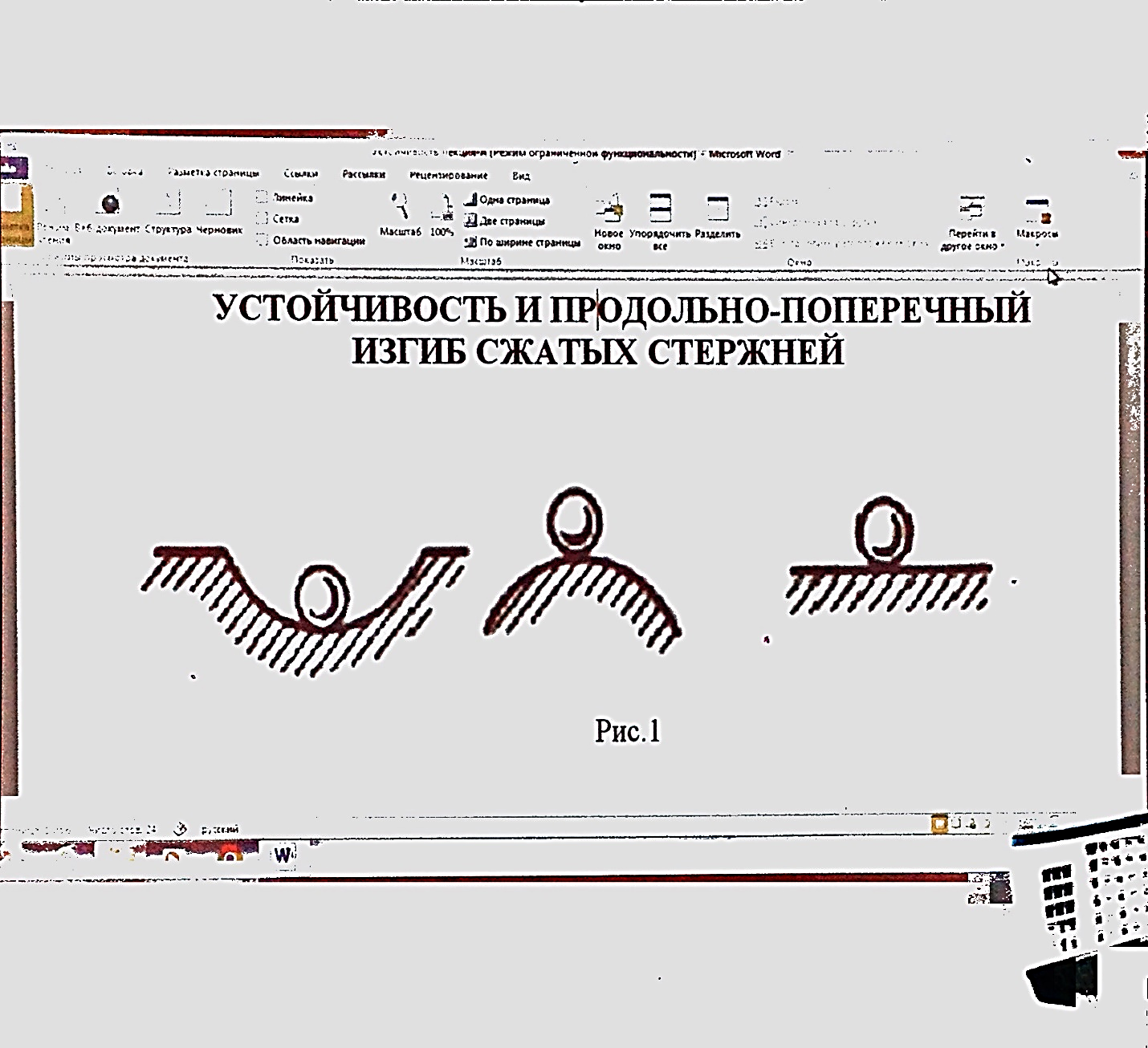
Рис.1.1.«Устойчивое равновесие»
Равновесие называется неустойчивым, если система не возвращается в исходное положение после устранения причин, вызвавших отклонение, а отклоняется от него ещё больше.
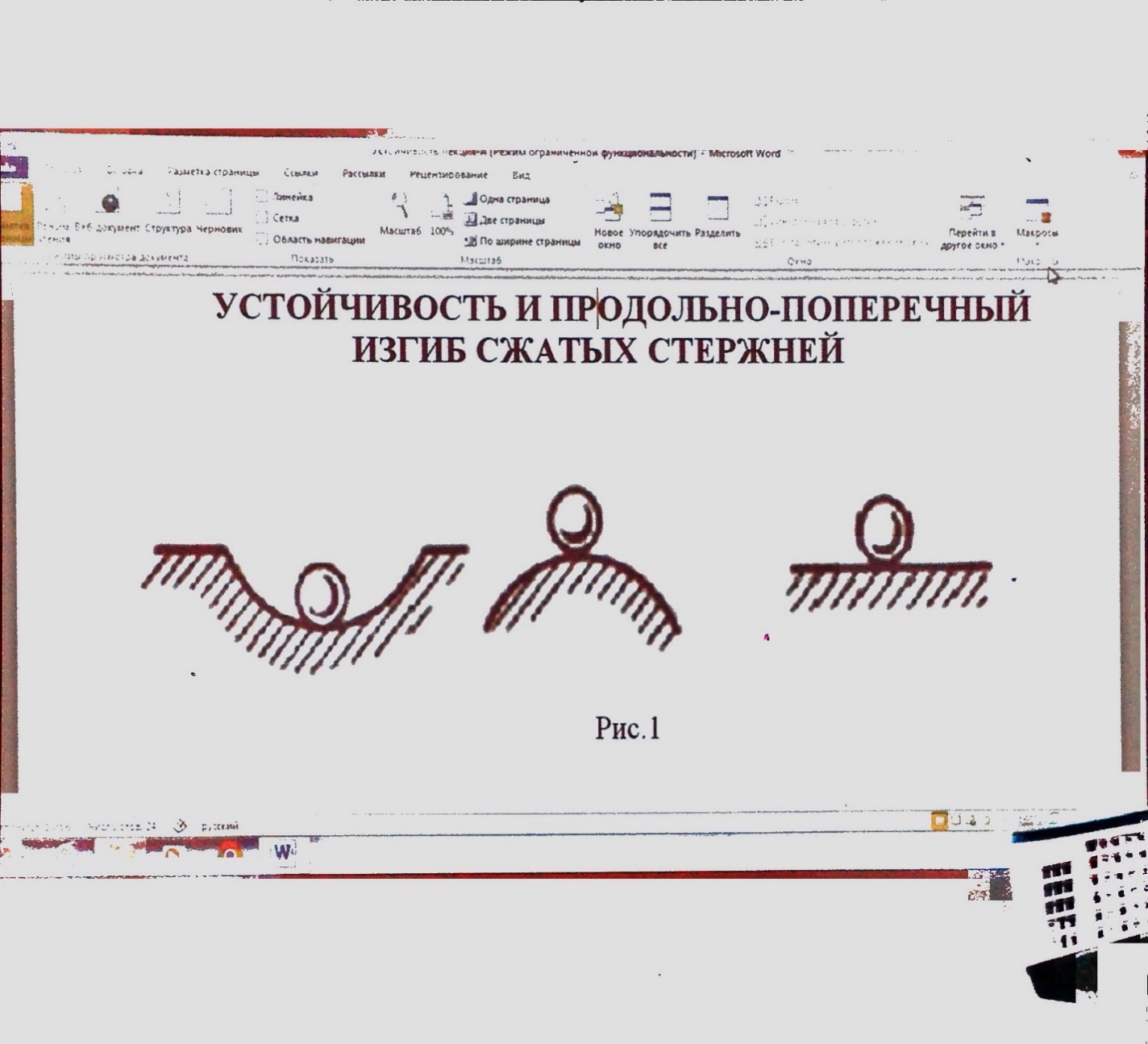
Рис.1.2.«Неустойчивое равновесие»
Равновесие называется безразличным, если новое положение системы после отклонения от исходного остаётся положением равновесия и после удаления внешнего воздействия.
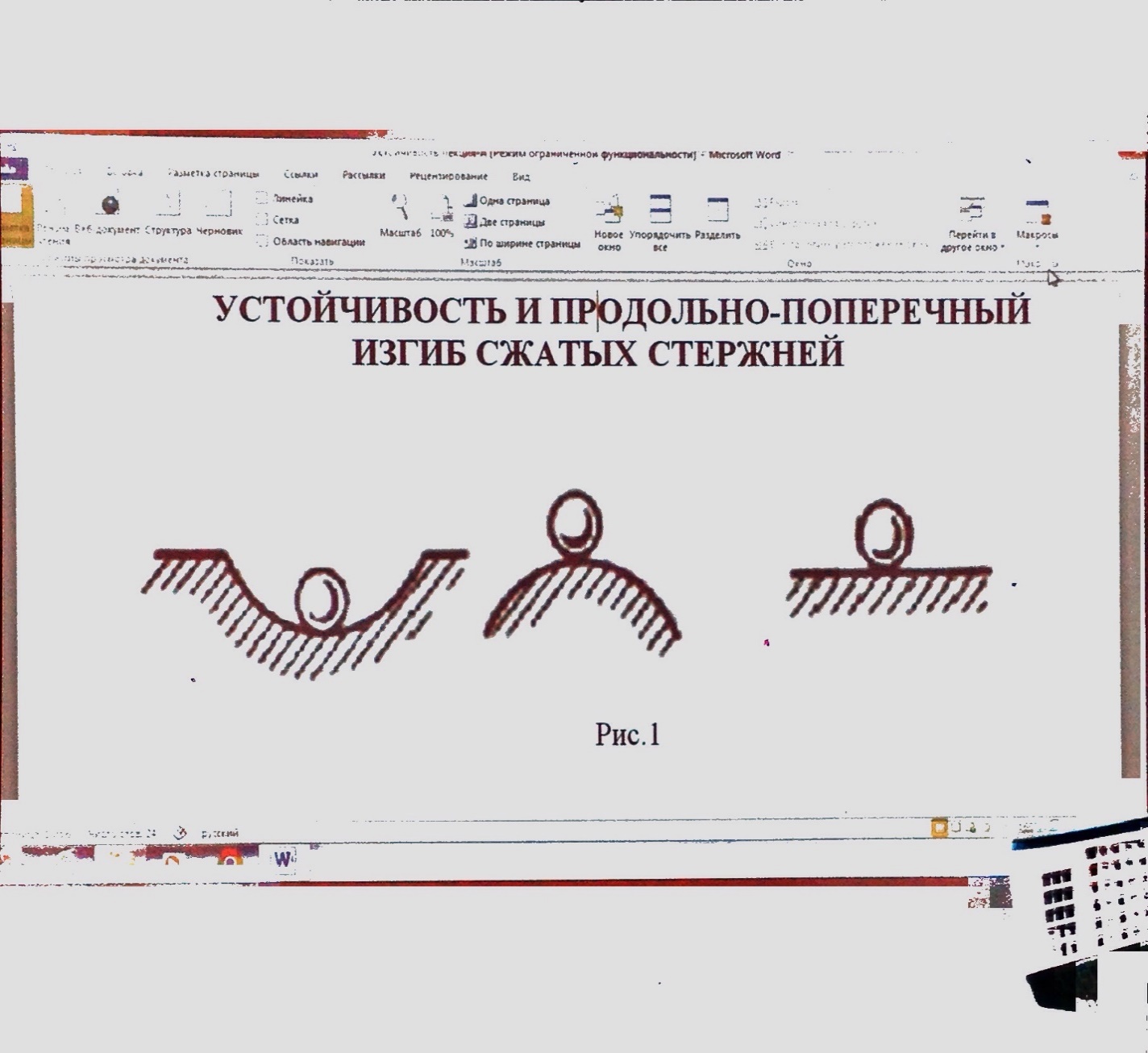
Рис.1.3.«Безразличное равновесие»
Характер равновесия упругих тел существенно зависит от величины действующих на них сил, например, форма равновесия длинного прямого стержня, подвергнутого осевому сжатию, устойчива только до определенного значения сжимающей силы.
Если такой стержень при малых значениях силы P несколько отклонить от исходного положения, то при устранении причин, вызвавших это отклонение, он снова примет первоначальную прямолинейную форму.
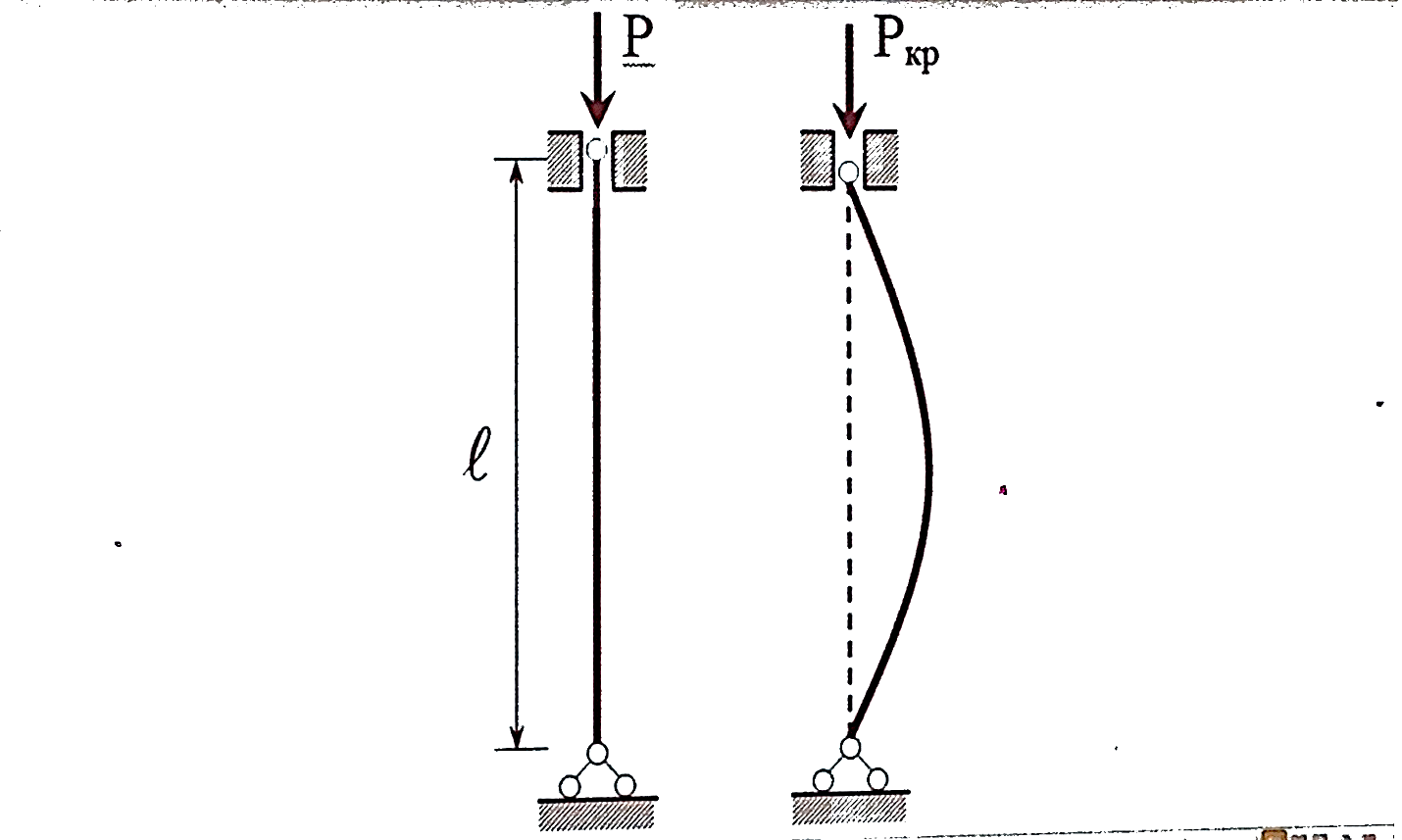
Рис.2.«Осевое сжатие»
При возрастании силы P стержень всё медленнее будет возвращаться к своей первоначальной прямолинейной форме, и наконец, при некотором значении силы P, называемом критическим, стержень не распрямится, а сохранит ту форму, которую ему придали. Таким образом, при значении силы P, равном критическому, стержень будет находиться в условиях безразличного равновесия. Если сила P превысит критическое значение, то форма равновесия станет неустойчивой.
Изгиб стержня продольной силой называется продольным изгибом. В практических расчётах на устойчивость критическую нагрузку считают разрушающей, а допускаемую нагрузку определяют, как часть критической.
где n – коэффициент запаса устойчивости, величина которого принимается примерно равной запасу прочности.
Определение критической силы.
Впервые проблема устойчивости сжатых стержней была поставлена Леонардом Эйлером. Эйлер вывел расчётную формулу для критической силы и показал, что её величина существенно зависит от способа закрепления стержня. Идея метода Эйлера, при различных способах закрепления концов заключается в установлении условий, при которых кроме прямолинейной возможна и смежная криволинейная форма равновесия стержня при постоянной нагрузке. Критическая сила Эйлера определяется по формуле:
Величина l0 называется приведённой длиной стержня, μ – коэффициент приведения длины, который зависит от вида опорных закреплений стержня.
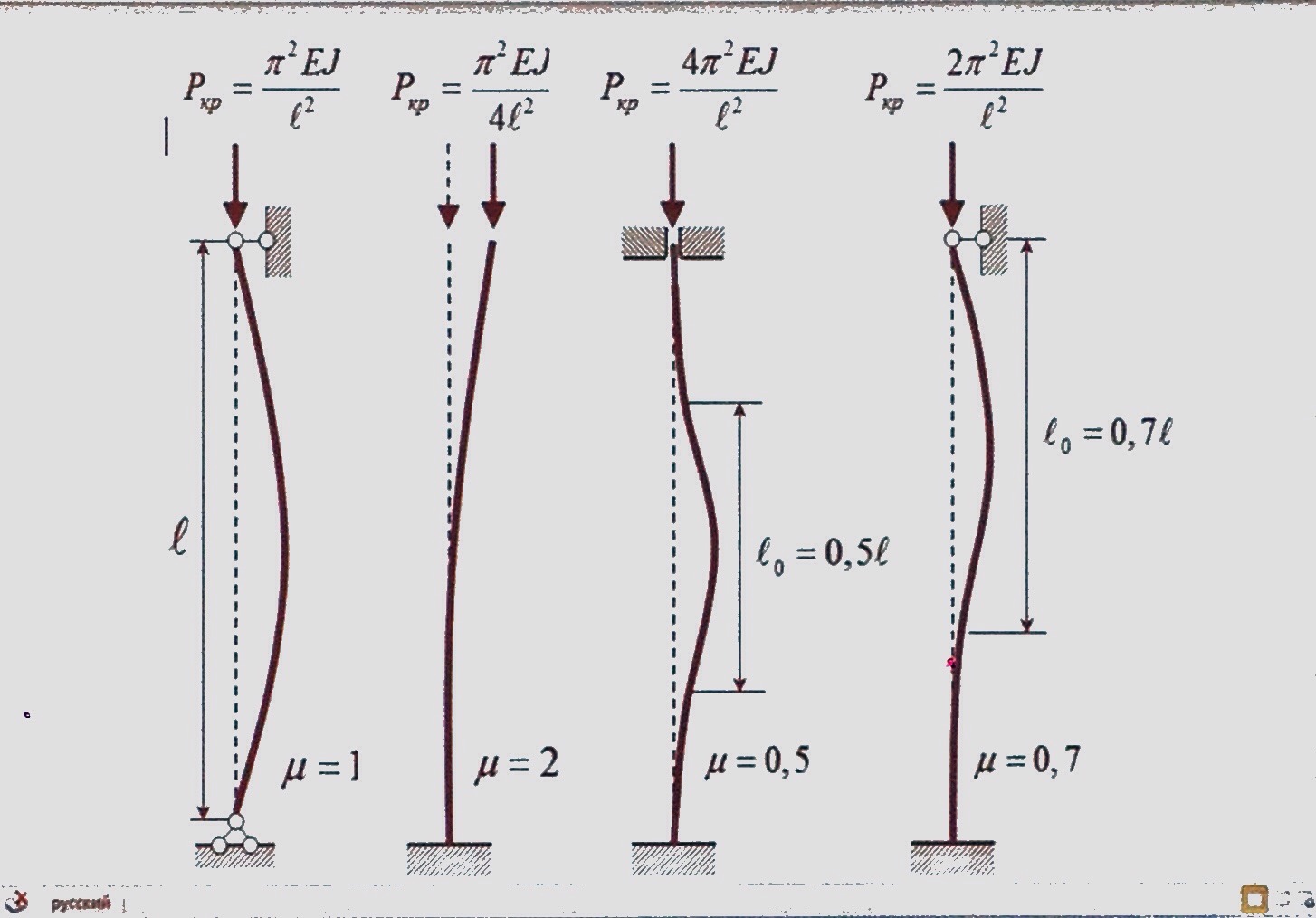
Рис.3. «Зависимость коэффициента приведения длины от вида опорных закреплений стержня»
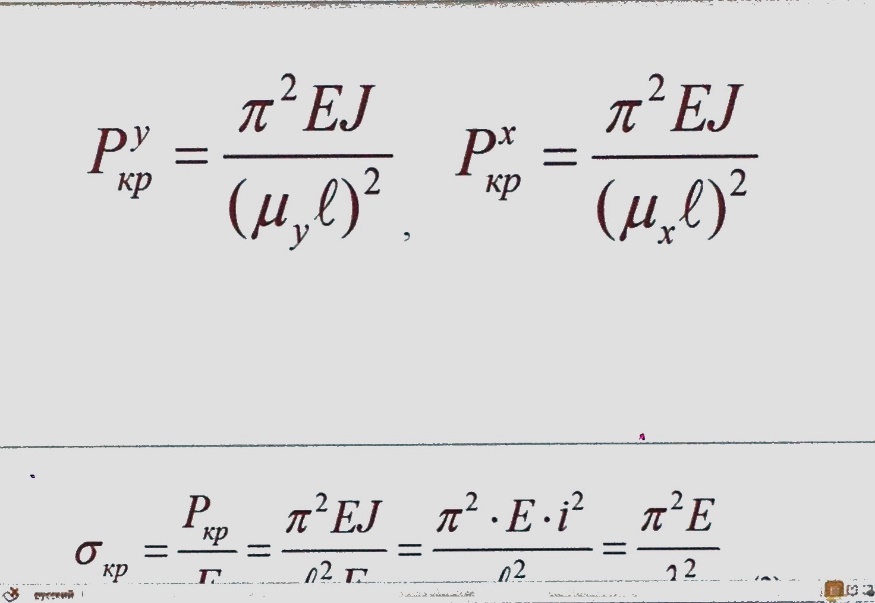
Критические силы, соответствующие потерям устойчивости стержня, определяются в двух главных плоскостях по формулам:
Напряжённо-деформированное состояние сжатых стержней при продольном изгибе (колонн) и характер их разрушения зависят от материала стержня, от размеров и формы поперечного сечения, от длины стержня, от способов закрепления концов и т.д.
Критические напряжения определяются по формуле:
где λ – гибкость стержня; i– радиус инерции поперечного сечения.
Так как размеры сечения часто не одинаковы относительно осей, соответственно могут отличаться радиусы инерции сечения относительно их осей, и как следствие, будут отличаться гибкости, соответственно гибкости должны определяться для каждой оси в отдельности:
Продольный изгиб сжатых стержней будет происходить относительно оси, по отношению к которой гибкость стержня больше.
Значения предельной гибкости приводятся в нормах и зависят от характера нагрузки (статическая или динамическая), от конструкции и её материала.
Формулы Эйлера для критической силы и критических напряжений, для стержней из стали с пределом пропорциональности 200–220 МПа, можно использовать при гибкости Лямбда ≥ 100. При значениях гибкости в пределах 60–100 можно использовать формулу Тетмайера–Ясинского:
где для малоуглеродистой стали a= 310МПа,b= 1,14МПа. Также можно использовать квадратичную зависимость:
где σт – предел текучести стали; σпц– предел пропорциональности стали.
При гибкости стержня менее 60 можно принять критические напряжения равными пределу текучести.
Условие устойчивости сжатого стержня имеет вид:
где R – расчётное сопротивление материала стержня; γc– коэффициент условия работы; φ – коэффициент продольного изгиба, находящийся в пределах 0-1.
Величина коэффициентапродольного изгиба (φ) зависит от материала стержня и гибкости стержня.
Коэффициент запаса устойчивости стержня можно определить, как отношение критической силы (Pкр) к нормативному значению продольной сжимающей силы (Pн):
Продольно-поперечный изгиб возникает от совместного действия поперечной и продольной нагрузок:

Рис.4.«Продольно-поперечный изгиб, возникающий от совместного действия поперечной и продольной нагрузок»
Уравнение изогнутой оси стержня, в этом случае, имеет вид:

где Mп – изгибающий момент от действия поперечной нагрузки
Суммарный прогиб стержня (υ):
где υп – прогиб от поперечнойнагрузки; υ1 - прогиб от продольной сжимающей силы.
Приближённое решение уравнения изогнутой оси можно представить в виде:
 , где Pэ – критическая сила в плоскости изгиба, вычисляемая по формуле Эйлера независимо от величины гибкости стержня.
, где Pэ – критическая сила в плоскости изгиба, вычисляемая по формуле Эйлера независимо от величины гибкости стержня.
Суммарный изгибающий момент от совместного действия продольной силы и поперечной нагрузки определяется по формуле:
Проверка прочности стержня при продольно-поперечном изгибе выполняется по формуле:
 .
.
✓Лекция 11.04.18 «…»
При расчёте на прочность, при динамическом действии сил, допускаемы напряжения принимаются меньшими по сравнению со статическими условиями нагружения.
При динамическом действии нагрузок используется принцип Даламбера, согласно которому движущуюся с ускорением систему каждый момент времени можно рассматривать как находящуюся в покое, если к внешним силам добавить силы инерции.
Инерция – явление, при котором тела сохраняют состояние покоя или равномерное прямолинейное движение при отсутствии внешних сил.
Если силы инерции известны, то расчёт можно вести по методу сечений, а для вычисления внутренних сил использовать уравнения статики твёрдого тела.Если определение сил инерции затруднительно или невозможно (как при ударном действии нагрузок), то для вычисления динамических напряжений и деформаций используется закон сохранения энергии с привлечением основных положений о потенциальной энергии деформируемого тела.
Задача соударения деформируемых твёрдых тел в механике относится к классу динамических контактных задач со смешанными граничными условиями, содержащими многие трудности математического порядка при решении. Эти трудности связаны с определением характера изменения функций напряжения в зоне контакта соударяемых тел по пространственным координатам и во времени. Большие сложности возникают при учёте волновых процессов, возникающих как в зоне контакта, так и внутри соударяемых тел, например, дифракционных волновых процессов по контуру в зоне контакта и интерференционных явлений внутри соударяемых тел. Существенное значение приобретает учёт фактора рассеяния энергии, трудно поддающийся анализу => При решении задач, применяется упрощённый инженерный подход, основанный на предпосылках:
1. При взаимодействии соударяемых тел, они принимаются или идеально упругими, или абсолютно твёрдыми
2. Деформации в упругих соударяемых телах происходят мгновенно. Установлено, что, практически во всех случаях, силы динамического воздействия пропорциональны статическим => расчёты на прочность и жёсткость при динамических нагрузках выполняются по методам, разработанным для статического нагружения, но с введением соответствующих значений динамических коэффициентов =>
 ;
;
 , где Kd–динамический коэффициент
, где Kd–динамический коэффициент
Условия прочностей и жёсткостей по методу допустимых напряжений имеет вид:
При изучении динамически упругих систем – эти системы принято классифицировать по числу их степеней свободы. Под числом степеней свободы понимается число независимых координат, определяющих положение материальных точек системы в произвольный момент времени.
СОУДАРЕНИЕ ТВЁРДОГО ТЕЛА И СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Взаимодействие тел, при котором за очень малый промежуток времени скачкообразно изменяются скорости взаимодействующих тел называется ударом. В период взаимодействия соударяемых тел между ними развивается контактная сила, хотя время действия контактной силы очень мало, и измеряется в микросекундах (или миллисекундах). Она развивается очень быстро и принимает большие значения, при забивке свай, тяжёлый груз падает с некоторой высоты на верхний торец сваи и погружает её в грунт. Во время удара между грузом и сваей возникают большие взаимные давления! Скорость ударяющего тела, за короткий промежуток времени, изменяется или падает до нуля, тело останавливается и на него от ударяемого тела передаются большие ускорения, направленные в сторону, обратную его движению, т.е. передаётся реакция, равная произведению массы ударяющего тела на ускорение, обозначив ускорение через “a”, получим, что реакция, передаваемая на падающий груз, будет иметь вид:  , где Q–вес ударяющего тела.
, где Q–вес ударяющего тела.
По закону равенства действия и противодействия, на ударяемую конструкцию передаётся та же сила, но обратно направленная. Эти силы вызывают напряжения в обоих телах =>в ударяемой конструкции возникают такие напряжения, как будто к ней была приложена сила инерции ударяющего тела.
Для определения напряжений, силу инерции Pdможем рассмотреть как статическую нагрузку. Затруднение в вычислении этой инерции… Продолжительность удара, в течение которого происходит падение скорости до нуля, неизвестна, поэтому остаётся неизвестная величина ускорения =>приходится пользоваться законом сохранения энергии.
При ударе происходит быстрое превращение одного вида энергии в другую, а именно кинетическая энергия (ударяющего тела) переходит в потенциальную энергию (деформации).
Теория удара опирается на ряд допущений:
1. Форма изогнутой оси конструкции, при ударе, подобна изогнутой оси при её статическом нагружении
2. Удар является неупругим, т.е. ударяющее тело не отскакивает от конструкции, а продолжает двигаться вместе с ней
3. Деформации, вызванные ударом, являются упругими, т.е. максимальные напряжения не превышают предела пропорциональности
4. Массой конструкции пренебрегают, т.е. считают её невесомой.
✓Лекция 18.04.18 «Расчёт динамического коэффициента при ударной нагрузке»
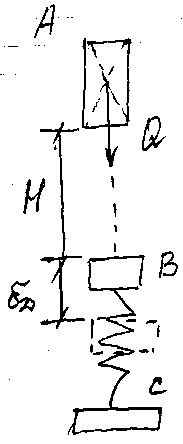
Предположим, что очень жёсткое тело A весом Y, деформацией которого можно пренебречь, падая с высоты H, ударяет по телу B, опирающемуся на упругую систему C.
 , где δD – перемещение тела в направлении удара.
, где δD – перемещение тела в направлении удара.
Полагая, что кинетическая энергия ударяющегося тела полностью переходит в потенциальную энергию деформации упругой системы, следовательно  , где T–кинетическая энергия, U–потенциальная энергия.
, где T–кинетическая энергия, U–потенциальная энергия.
Так как к моменту окончания деформации ударяющее тело пройдёт путь  , то его запас энергии будет равен произведённой работе AD, следовательно
, то его запас энергии будет равен произведённой работе AD, следовательно  .
.
При статической деформации потенциальная энергия численно равна половине произведения действующей силы на соответствующую деформацию, следовательно  . Статическая деформация δc в ударяемом теле может быть вычислена по закону Гука, который можно записать в виде:
. Статическая деформация δc в ударяемом теле может быть вычислена по закону Гука, который можно записать в виде:  ;
;  , где c – коэффициент пропорциональности (или жёсткость системы), который зависит от свойств материала, формы и размера тела, от вида деформации и положения ударяемого тела.
, где c – коэффициент пропорциональности (или жёсткость системы), который зависит от свойств материала, формы и размера тела, от вида деформации и положения ударяемого тела.
При простом растяжении/сжатии:

При изгибе балки, шарнирно-закреплённой по концам и нагруженной сосредоточенной силой в середине пролёта:

Следовательно, выражение для энергии при статической деформации будет записано:
В основу выражения входят предпосылки:
1. Справедливость закона Гука;
2. Постепенный от нуля до окончательного значения рост силы, напряжений и пропорциональных им деформаций.
Реакция системы C на действие упавшего груза является следствием развития деформаций δD. Эта деформация растёт постепенноот нуля до максимальной величины и, если напряжения не превосходят предела пропорциональности материала, связывают с законом Гука:
 где PD–реакция системы (C)
где PD–реакция системы (C)
Можно считать, что вид формулы для потенциальной энергии деформации при ударе будет таким же, как и при статическом нагружении системы (C):

Приравнивая выражения кинетической и потенциальной энергии, получаем:
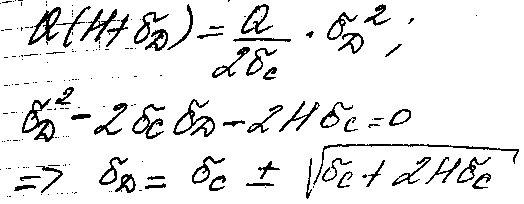
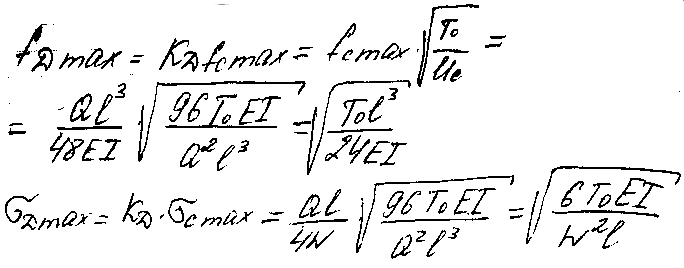
Удерживая перед радикалом, для определения наибольшей величины деформации системы в направлении удара, знак “+”, получим:
 , где KD – динамический коэффициент:
, где KD – динамический коэффициент:
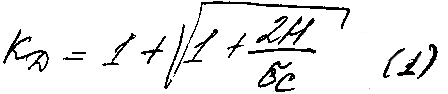
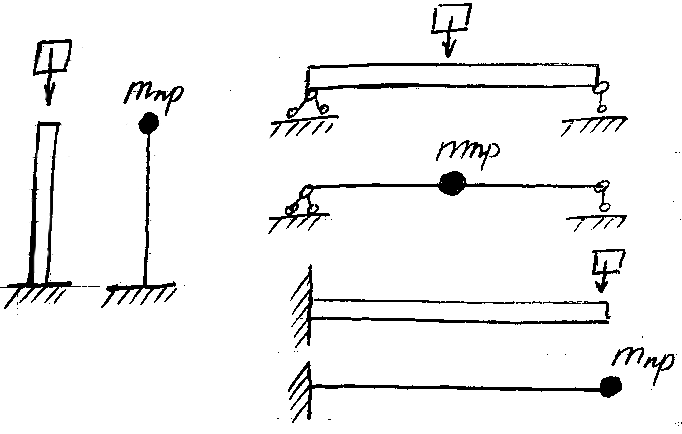
Формула (1) используется в случаях, когда масса упругого тела, испытывающая удар, мала и ею пренебрегают в расчёте. При необходимости учёта массы тела, формула для расчёта динамического коэффициента выглядит следующим образом:
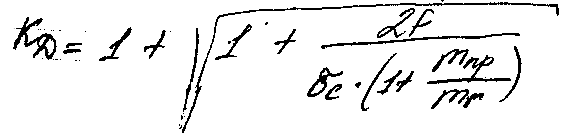 , где mГ – масса падающего груза, mпр – приведённая масса тела, испытывающего удар:
, где mГ – масса падающего груза, mпр – приведённая масса тела, испытывающего удар:
 , где m – истинная распределённая масса тела, α – коэффициент приведения распределённой массы к точечной.
, где m – истинная распределённая масса тела, α – коэффициент приведения распределённой массы к точечной.
Коэффициент α зависит от вида удара (продольный, изгибный и т.д.) и от характера закрепления концов стержня.
Общий принцип решения задач на определение напряжений при ударе может быть сформулирован как:
1. Вычислить кинетическую энергию ударяющего тела
2. Вычислить потенциальную энергию тел, воспринимающих удар, при этом потенциальная энергия должна быть выражена через напряжения, деформацию или силу инерции ударяющего тела.
3. Приравнять величины кинетической и потенциальной энергии Uи из уравнения найти динамическое напряжение или деформацию.
Этот принцип расчёта предполагает, что вся кинетическая энергия ударяющего тела целиком переходит в потенциальную энергию деформации упругой системы.
Это положение некорректно, т.к. кинетическая энергия падающего груза частично превращается в тепловую энергию и энергию неупругой деформации основания.
ОЦЕНКА ПРОЧНОСТИ ПРИ УДАРНОЙ НАГРУЗКЕ
Условие прочности при ударе:
 , где σD–величина динамического напряжения, [σD] –допускаемая величина нормального напряжения при ударе.
, где σD–величина динамического напряжения, [σD] –допускаемая величина нормального напряжения при ударе.
Для пластичного материала:
 , где σT–предел текучести.
, где σT–предел текучести.
При изгибе величина статической деформации представляет собой статический прогиб балки в месте удара и зависит от схемы нагружения и условий опирания балки
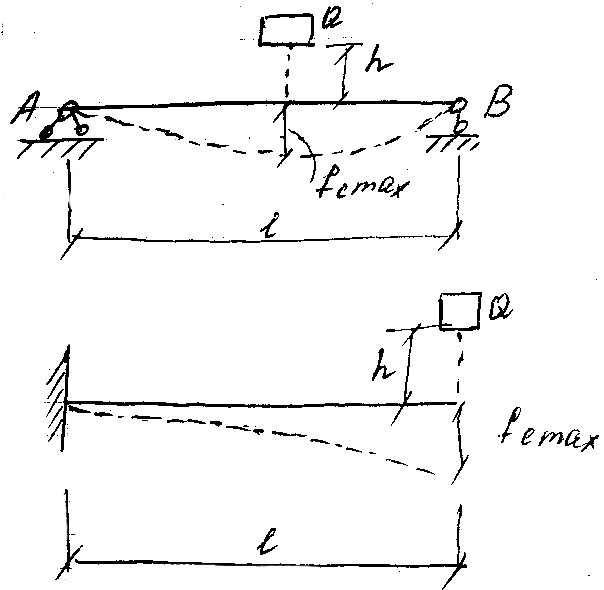
Для балки пролетом l, шарнирно-закреплённой по концам и испытывающей, по середине пролёта, удар от падающего с высоты hгруза Q:
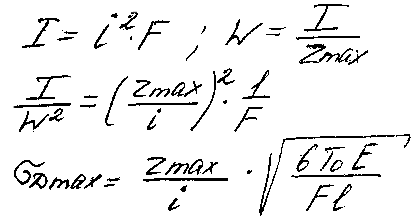
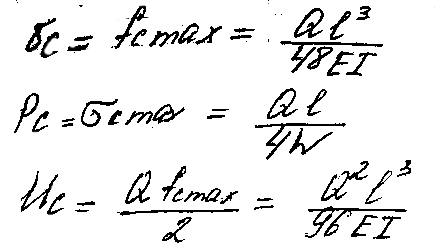 , где W – момент сопротивления сечения
, где W – момент сопротивления сечения
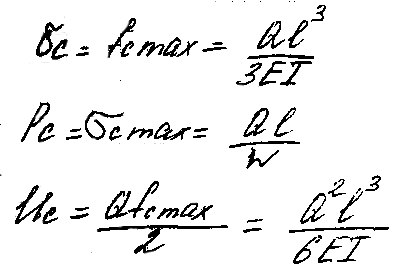
Для консольной балки, испытывающей удар от груза a, падающего на свободный конец консоли:
Подставляя в формулу для коэффициента динамичности значения δc или Uc, находим:
1. Для балки на двух опорах:
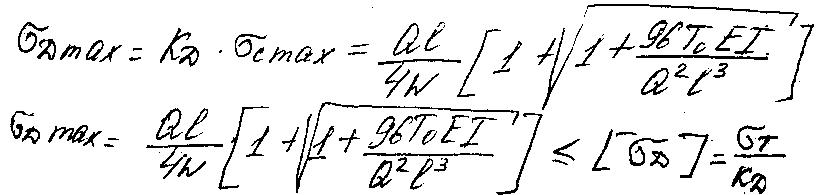
Приближенные формулы для динамической деформации и напряжения в случае удара имеют вид:
2. Для консольной балки имея ввиду, что:
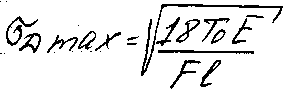
В балке прямоугольного сечения высотой hи шириной b, поставленной на ребро или положенной плашмя, наибольшие напряжения при ударе будут одинаковы и равны:
Динамические напряжения при изгибе балки зависят от модуля упругости материала, объёма, формы поперечного сечения, а также схемы нагружения и условия опирания. Сопротивление зависит от момента сопротивления и жёсткости балки. Чем больше податливость (деформируемость) балки, тем большую силу удара она может выдержать при одних и тех же напряжениях.
Динамические напряжения не должны превышать предел пропорциональности. Если превышение имеет место, то необходимо предусмотреть конструктивные меры по увеличению статического перемещения. Попытки уменьшить динамические напряжения, увеличив сечения, не приносят эффекта, т.к. увеличивается жёсткость, статический прогиб уменьшается, а динамический коэффициент увеличивается.
✓Лекция 25.04.18 «Расчёт балки на упругом основании»
Часто встречаются балочные элементы, лежащие на сплошном упругом основании (ленточные фундаменты зданий, фундаменты плотин и т.д.).
Упругим основание называется такое основание, которое реализует распределённую вдоль оси балки реакцию с погонной интенсивностью, пропорциональной перемещению, прогибу или углу поворота сечения.
Конструкция на упругом основании находится под действием внешних нагрузок и реактивного отпора основания, непрерывно распределённого по длине или площади контакта.
Закон изменения реактивного отпора основания не может быть определён из уравнения равновесия. Он зависит от свойств упругого основания и характеризуется его расчётной схемой или моделью.
Методы расчёта конструкций, лежащих на упругом основании можно разделить на 3 группы:
1. Методы, базирующиеся на Винклеровой модели основания
2. Методы, базирующиеся на теории упругого полупространства
3. Методы, базирующиеся на комбинированных моделях упругого основания
Исторически, первой и часто применяемой для практических инженерных расчётов является Винклерова модель основания. При расчёте балок на упругом основании, у этой модели исходят из гипотезы Винклера о пропорциональности между давлением на основание и осадкой.
Реакция, со стороны основания произвольной точки при соблюдении условий проскальзывания между подошвой балки и основанием, принимается пропорциональной прогибу:
 …(1), где qr(x) – реакция основания, приходящегося на единицу длины балки (реактивный отпор основания)
…(1), где qr(x) – реакция основания, приходящегося на единицу длины балки (реактивный отпор основания)  , y(x)–прогиб балки, принимаемый равным осадке основания, b–ширина площади контакта балки и основания, k – коэффициент, характеризующий жёсткость основания (коэффициент податливости основания, отпорностью основания или коэффициентом Пастели)
, y(x)–прогиб балки, принимаемый равным осадке основания, b–ширина площади контакта балки и основания, k – коэффициент, характеризующий жёсткость основания (коэффициент податливости основания, отпорностью основания или коэффициентом Пастели)  .
.
Знак “-“ в уравнении (1) говорит о том, что реакция основания противоположна уравнению просадки.
С формальной точки зрения Винклерова модель основания не является строгой. Наблюдения за натуральными сооружениями и экспериментальные исследования показывают, что осадка основания зависит от нагрузки данной точки и от нагрузки соседней точки.
Грунт оседает не только под фундаментом, но и по соседству с ним.
Величина коэффициента Пастели зависит от вида грунта и от величины и форм загруженной площади.
Грунт на растяжение не работает.
Вместе с тем, исследования показали, что модель основания Винклера вполне применима для практических расчётов. Механические свойства модели Винклера характеризуются коэффициентом жёсткости основания, который означает величину усилия, кторое необходимо приложить к 1см2 поверхности основания, чтобы оно получило осадку 1см.
В случае абсолютно жесткого основания коэффициент Пастели = ∞.
В случае абсолютноподатливого основания коэффициент Пастели = 0.
Если основанием служит большое число сближенных …, то коэффициент жёсткости  , где δ–податлив. попереч., a–расстояние между осями попереч.
, где δ–податлив. попереч., a–расстояние между осями попереч.
Значение коэффициента Пастели основания для различных грунтовых условий – различны:
1. Для песка или глины мокрой размягчённой 
2. Для песка слежавшегося, насыпного гравия или влажной глины 
3. Для известняка, песчаника или грунта в условиях вечной мерзлоты 
4. Для твёрдой скалы 
При проектировании ответственных капитальных сооружений, величина коэффициента жёсткости основания устанавливается на основании испытания грунта штампом в условиях естественного залегания на площадке строительства.
Для предварительных расчётов или однородных оснований величину коэффициента жёсткости основания принимают по таблицам. Зависимость (1) является фундаментальным уравнением теории расчёта конструкций на Винклеровом основании. В расчётах принимаются допущения!
1. Конструкция сохраняет связь с основанием независимо от знака перемещения, т.е. между балкой и основание не должно быть разрывности
2. Между балкой и поверхностью основания, при изгибе, отсутствует трение
3. Все деформации принимаются достаточно малыми, следовательно, можно пользоваться принципом наложения, суммируя деформации от различных воздействий.
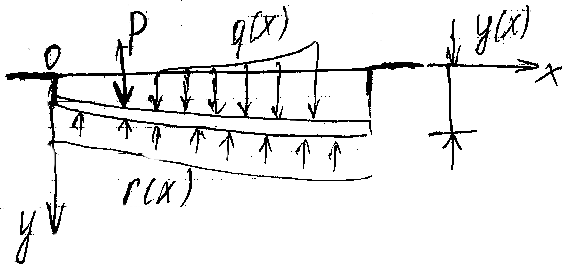
Суммарная интенсивность распределённой нагрузки, приложенной к балке в произвольной точке:
 , где q(x) – приложенная к балке нагрузка.
, где q(x) – приложенная к балке нагрузка.
Дифференциальное уравнение изгиба балки на упругом основании Винклера имеет вид:

При интегрировании уравнения (2) производится замена переменной по формуле:
 , где EI–жёсткость балки при изгибе.
, где EI–жёсткость балки при изгибе.
Параметр λ показывает жёсткость балки и основания и имеет размерность  .
.
Решение уравнения (2) в форме метода начальных параметров:
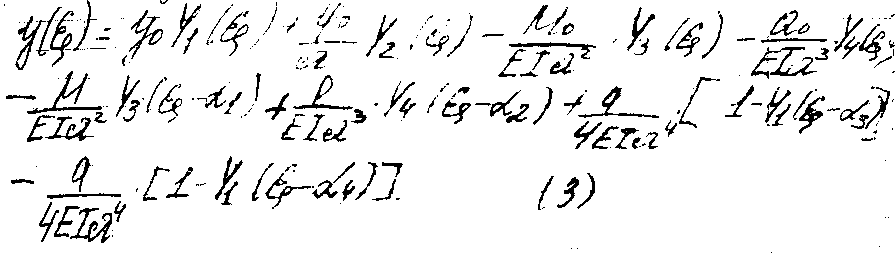 , где y0, φ0,M0,Q0–начальные параметры, представляющие прогиб, угол поворота, изгибающий момент и поперечную силу в начале отсчёта, при x = 0, Y1, Y2,Y3,Y4–функции Крылова, показывающие комбинации произведений гиперболическихи тригонометрических функций.
, где y0, φ0,M0,Q0–начальные параметры, представляющие прогиб, угол поворота, изгибающий момент и поперечную силу в начале отсчёта, при x = 0, Y1, Y2,Y3,Y4–функции Крылова, показывающие комбинации произведений гиперболическихи тригонометрических функций.
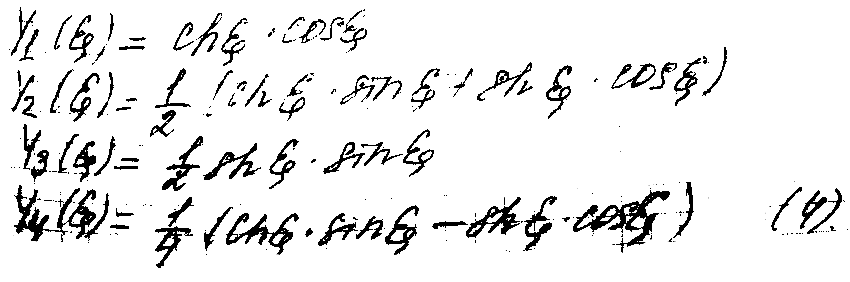
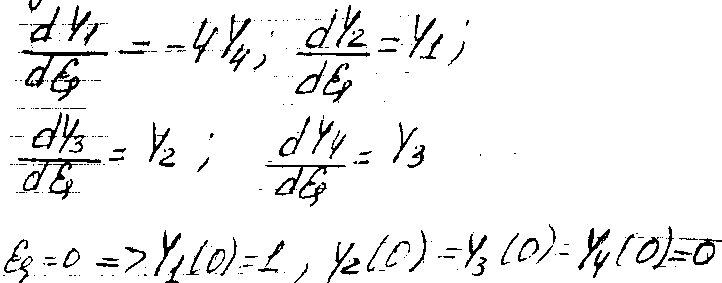
Между функциями Крылова зависимости:
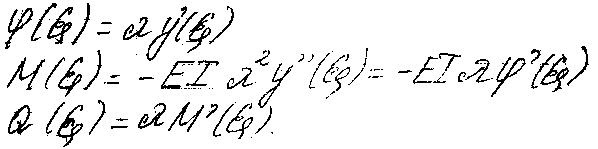
Углы поворота, изгибающие моменты и поперечные силы определяются из зависимости:
В начале расчёёта неизвестны 2 начальных параметра, они определяются из граничных условий на противоположном конце балки.
✓Лекция 16.05.18 «Напряжённое и деформированное состояние в окрестности точки тела. Часть 1»
Главной задачей исследования напряжённо-деформированного состояния (НДС) тела является определение напряжений и деформаций тела и характера их изменения во времени.
При исследовании НДС исходят из следующих допущений:
1. О непрерывности (сплошности) среды, при этом атомистическая структура вещества и наличие каких-либо пустот не учитывается;
2. О естественном состоянии. На основании этого допущения, начальная НДС, возникшая до приложения силовых воздействий, не учитывается, т.е. предполагается, что в момент нагружения тела деформации и напряжения в точке равны нулю;
3. Об однородности. Предполагается, что состав тела одинаков во всех точках;
4. О шаровой изотропности. Считается, что механические свойства материала одинаковы по всем направлениям.
5. Об идеальной упругости. Предполагается полное исчезновение деформаций после снятия нагрузки;
6. О линейной зависимости между деформациями и напряжениями.
7. О малости деформаций. Предполагается, что линейные и относительные деформации малы по сравнению с единицей.
Под действием нагрузок, приложенных к телу, в нём возникают внутренние силы, которые определяются величинами нормальных и касательных напряжений в каждой точке тела.
Совокупность напряжений, действующих на различных площадках, проведённых через точку тела, характеризует напряжённое состояние в окрестности данной точки.
Чтобы определит напряжённое состояние в точке необходимо знать полные напряжения по трём взаимно перпендикулярным площадкам, проходящим через эту точку. Так как каждое полное напряжение можно разложить на три составляющие, то напряжённое состояние будет определено если будут известны 9 составляющих напряжений (рис.1).
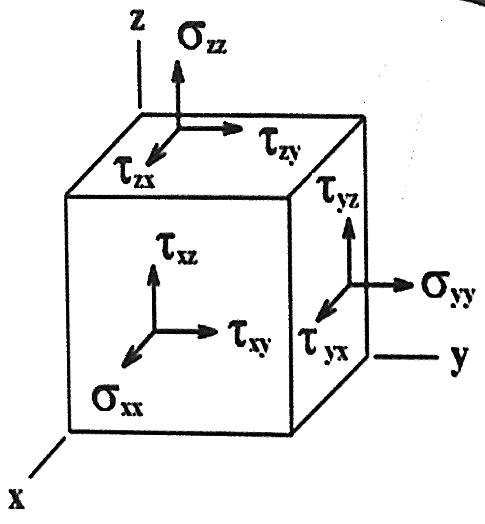 Рис.1
Рис.1
Совокупность составляющих напряжений можно представить в виде матрицы, которая называется тензором напряжений в точке:
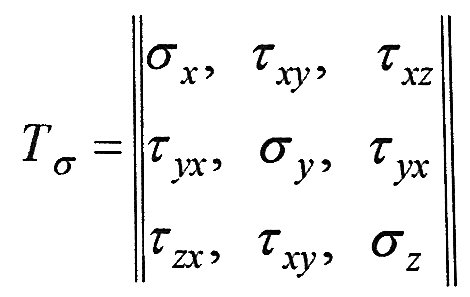
В каждой горизонтальной строчке матрицы записаны 3 составляющих напряжения, действующих по одной площадке. В каждом вертикальном столбце тензора записаны 3 напряжения, параллельных одной и той же оси.
Если приравнять к нулю сумму моментов всех сил, действующих на элементарный параллелепипед, относительно каждой центральной оси, получим три уравнения закона парности касательных напряжений:
τxy = τyx
τyz = τzy
τzx = τxz
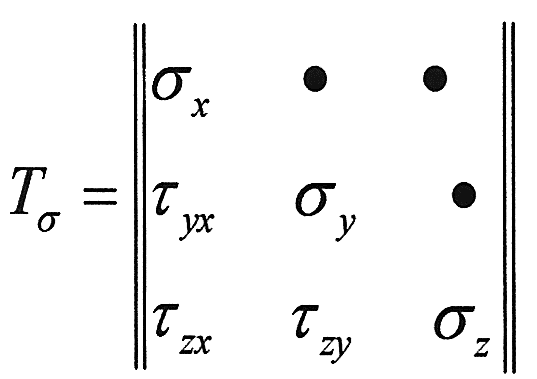
Закон парности касательных напряжений формулируется следующим образом: касательные напряжения, действующие по взаимно перпендикулярным площадкам и направленные перпендикулярно к линии пересечения площадок равны по величине и одинаковы по знаку. Таким образом из девяти составляющих напряжений тензора 6 попарно равны друг другу, а значит для определения напряженного состояния в точке достаточно найти 6 составляющих напряжений:
ГЛАВНЫЕ НАПРЯЖЕНИЯ
В любой точке тела можно найти 3 взаимно перпендикулярныеглавные площадки, на которых отсутствуют касательные напряжения. Нормальные напряжения по этим площадкам будут называться главными напряжениями. Одно из главных напряжений имеет наибольшее значение, другое наименьшее, а третье имеет величину промежуточную между первыми двумя. Они обозначаютсяσ1;σ2;σ3 и  . Величины главных напряжений определяются из кубического уравнения:
. Величины главных напряжений определяются из кубического уравнения:
Коэффициенты I1, I2, I3называются инвариантами тензора напряжений. Решив кубическое уравнение, получим три корня из которых алгебраически большее обозначим как σ1, наименьшее как σ3, а промежуточное как σ2.
Величины главных напряжений в точке не зависят от выбора осей координат, а зависят от формы и размеров тела и его нагружения.
Положение главных площадок определяется направляющими косинусами нормалей к главным площадкам.
Большая категория задач допускает значительное упрощение математического решения – это задачи, в которых можно считать, что внешние воздействия лежат в плоскостях, параллельных какой-либо плоскости тела, и, что вызываемые ими напряжения и перемещения, одинаковы для всех точек любой оси, перпендикулярной к этой плоскости. Такие задачи объединяются общим названием – плоские задачи. Различают 2 разновидности плоских задач:
1. Плоское деформированное состояние (плоская деформация).
2. Плоское напряжённое состояние.
При плоском деформированном состоянии точки тела не могут перемещаться вдоль одной из трёх осей из-за препятствия со стороны соседних элементов, при этом нагрузка, действующая на тело, постоянна вдоль этой оси. В этом случае перемещения вдоль одной оси отсутствуют (как правило, вдоль оси Z), а два других перемещения не зависят от координаты третьей оси. Плоская деформация имеет место в призматическом или цилиндрическом теле, нагруженном по боковой поверхности, распределённой по длине нагрузкой, нормальной к продольной оси, при этом предполагается, что торцы тела закреплены так, что их точки могут свободно перемещаться в своей плоскости и не могут перемещаться в направлении продольной оси. Плоская деформация характеризуется следующими равенствами:
 , где uи v – перемещение вдоль оси xи y, w– перемещение вдоль оси z, ε – относительная деформация.
, где uи v – перемещение вдоль оси xи y, w– перемещение вдоль оси z, ε – относительная деформация.
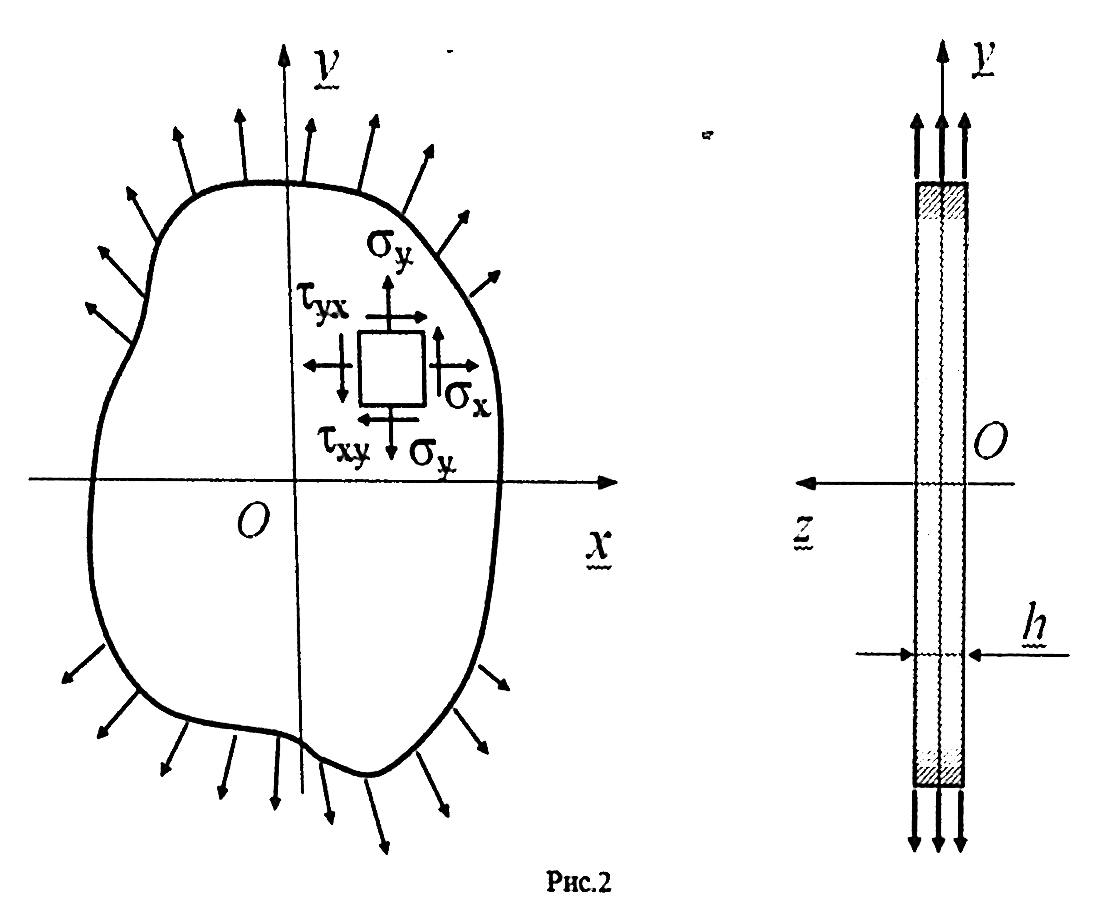
Плоским напряжённым состоянием называется такое состояние тела, при котором во всех его точках одно из главных напряжений равно нулю, при этом площадки, перпендикулярные к оси нулевого напряжения являются главными. Плоское напряжённое состояние характеризуется следующими равенствами:
При плоском напряжённом состоянии размеры тела вдоль оси z – малы, а боковые плоскости свободны от нагрузки. Такое состояние возникает в тонких пластинах, нагруженных по внешнему контуру:
✓Лекция 21.05.18 «Напряжённое и деформированное состояние в окрестности точки тела. Часть 2» (Дима)
Под действием внешних сил деформирование тела и перемещение его точек в пространстве. Для исследования деформаций в окрестности точки рассматривается элементарный параллелепипед со сторонами dx, dy и dz. В результате различия перемещений точек рёбра параллелепипеда удлиняются или укорачиваются, а первоначально прямые углы между рёбрами искажаются. В соответствии с этим различают два основных вида деформаций:
1. Линейные представляют собой относительные удлинения или укорочения рёбер элементарного параллелепипеда. Соответственно, dy1, dx1 и dz1 – это размеры элементарного параллелепипеда после деформации. Деформации удлинения считаются положительными, а укорочения – отрицательными.
2. Угловые деформации, или деформации сдвига, которые обозначаются как характеризуют искажения прямых углов между рёбрами элементарного параллелепипеда. Индексы показывают, в какой плоскости происходит угловая деформация.
Совокупность линейных и угловых деформаций в окрестности точки тела можно представить в виде матрицы, которая называется тензором деформаций:
Деформации сдвига также, как и касательные напряжения, обладают свойством парности. В следствие этого, из девяти составляющих тензора, шесть деформаций полностью определяют деформированное состояние в окрестности рассматриваемой точки тела:
Из девяти составляющих тензора, 6 деформаций определяют деформированное состояние в окрестности рассматриваемой точки тела
Среди множества осей, проведённых через точку тела, существуют три взаимно перпендикулярные оси, в системе которых отсутствуют угловые деформации. Эти оси называются главными осями деформированного состояния. А соответствующие им линейные деформации называются главными деформациями:
В изотропном теле главные оси напряжённого и деформированного состояний совпадают. Относительная объёмная деформация в окрестности точки (относительное изменение объёма элементарного параллелепипеда) с точностью до величин второго и третьего порядка, равна сумме трёх линейных деформаций:
Для линейно упругих и изотропных тел связь между напряжениями и деформациями в окрестности точки тела выражается обобщённым законом Гука. Обобщённый закон Гука может быть записан в прямой форме следующим образом:
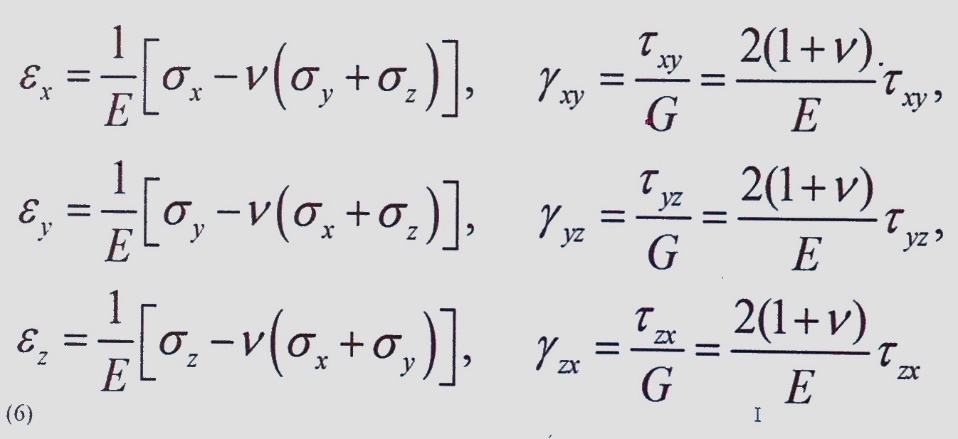 , где ε – модуль упругости материала, ν – коэффициент Пуассона, γ – модуль сдвига.
, где ε – модуль упругости материала, ν – коэффициент Пуассона, γ – модуль сдвига.
Закон Гука может быть записан и в обратной форме:
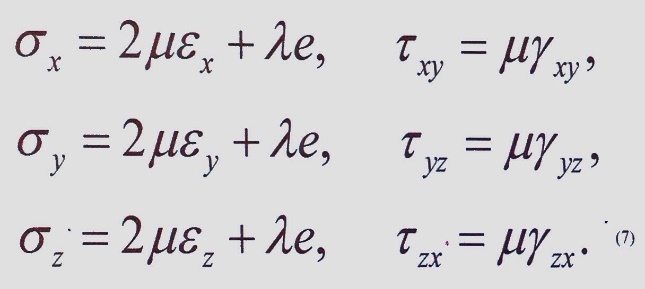 , где μ и λ – постоянные Лямэ. Они связаны с модулем упругост
, где μ и λ – постоянные Лямэ. Они связаны с модулем упругост
|
из
5.00
|
Обсуждение в статье: УСТОЙЧИВОСТЬ И ПРОДОЛЬНО-ПОПЕРЕЧНЫЙ ИЗГИБ СЖАТЫХ СТЕРЖНЕЙ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы