 |
Главная |


Рабочие характеристики двигателей постоянного тока
|
из
5.00
|
Рабочие характеристики двигателей параллельного возбуждения выражают зависимости частоты (скорости) вращения n, вращающего момента М и коэффициента полезного действия h от тока якоря Iя, изменяющегося вместе с изменением нагрузки на валу (или зависимости тех же величин от полезной мощности на валу двигателя P2) при постоянном напряжении сети U и неизменном токе возбуждения Iв , т.е.

Рабочие характеристики двигателя параллельного возбуждения изображены на рис. 16.2. Они снимаются путем изменения момента нагрузки на валу двигателя, а соответственно изменения тока якоря Iя.
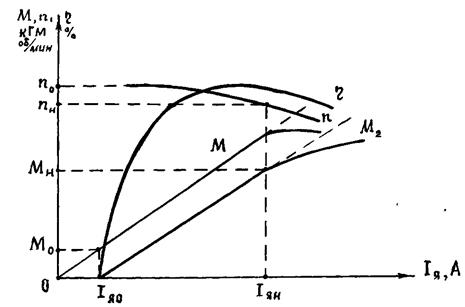 Рисунок 16.2 - Рабочие характеристики ДПТ параллельного возбуждения. Момент, развиваемый двигателем, согласно выражению (16.1) равен:
Рисунок 16.2 - Рабочие характеристики ДПТ параллельного возбуждения. Момент, развиваемый двигателем, согласно выражению (16.1) равен:  . При U = const и Iв = const магнитный поток двигателя параллельного возбуждения Ф при изменении нагрузки в пределах номинальной практически остается постоянным, поэтому моментная характеристика такого двигателя графически иллюстрируется прямой линией. При значительном увеличении тока (при больших нагрузках на валу двигателя) происходит некоторое отклонение характеристики M = f(Iя) от прямолинейной зависимости в сторону оси абсцисс, так как с увеличением тока в якоре все сильнее проявляется размагничивающее действие реакции якоря, уменьшающее основной магнитный поток машины Ф.
. При U = const и Iв = const магнитный поток двигателя параллельного возбуждения Ф при изменении нагрузки в пределах номинальной практически остается постоянным, поэтому моментная характеристика такого двигателя графически иллюстрируется прямой линией. При значительном увеличении тока (при больших нагрузках на валу двигателя) происходит некоторое отклонение характеристики M = f(Iя) от прямолинейной зависимости в сторону оси абсцисс, так как с увеличением тока в якоре все сильнее проявляется размагничивающее действие реакции якоря, уменьшающее основной магнитный поток машины Ф.
В соответствии с выражением для n (16.6) при U = const и Iв = const, при пренебрежении размагничивающим действием реакции якоря зависимость n = f (Iя) имеет линейный падающий характер. С увеличением нагрузки на валу двигателя растут: ток в его обмотке якоря, IяRя и размагничивающее действие реакции якоря, уменьшающее основной магнитный поток машины Ф. Обычно влияние падения напряжения преобладает над размагничивающим действием реакции якоря, и поэтому зависимость n = f (Iя) представляет падающую характеристику, имеющую сравнительно небольшой наклон к оси абсцисс. Частота вращения при изменении нагрузки в рабочем диапазоне у таких двигателей параллельного возбуждения изменяется всего на 3-10%, поэтому характеристика n = f (Iя) называется "жесткой".
Коэффициент полезного действия h равен отношению полезной мощности P2 , развиваемой двигателем на валу, к полной мощности, потребляемой им из сети P1. Для двигателя параллельного возбуждения он равен:
 , (16.10)
, (16.10)
где М2 - полезный вращающий момент на валу двигателя, кГ×м.
При небольших нагрузках, когда потери в меди (переменные потери) малы, КПД с увеличением тока якоря Iя быстро возрастает, но затем по мере дальнейшего увеличения нагрузки потери в меди увеличиваются и, когда они становятся равными потерям холостого хода (потерям в стали и механическим потерям), КПД достигает максимума (особенно при токе.Iя = (0,75…1,0)Iян.) При дальнейшем увеличении нагрузки, когда переменные потери начинают превалировать над потерями постоянными, КПД двигателя уменьшается.
Для двигателей малой мощности КПД находится в пределах h = 0,75…0,85, а у средних и крупных двигателей он достигает величины порядка h = 0,85…0,94.
Механические характеристики двигателей постоянного тока
Зависимость частоты вращения двигателя от момента на его валу при постоянном напряжении на зажимах и неизменном токе в обмотке возбуждения называются механическими характеристиками, т.е. n = f(M) при U=const и Iв = const. Характер этих зависимостей вытекает из выражения:

При постоянном магнитном потоке Ф семейство механических характеристик (рис. 16.3) проходит через одну точку nо - скорость вращения идеального холостого хода и отличается от характеристик n = f(Iя) только масштабом по оси абсцисс.
При включении добавочного сопротивления в цепь якоря Rря эти характеристики проходят более круто, и частота вращения при том же тормозном моменте Мтна валу уменьшается (см.рис.16.3). Механическая характеристика, определенная без добавочных сопротивлений в цепи якоря (Rря = 0) и регулировочных сопротивлений в цепи возбуждения, называется основной механической характеристикой.
3.Классификация электрических машин
Классификация по назначению.Электрические машины по назначению подразделяют на следующие виды:
электромашинные генераторы*, преобразующие механическую энергию в электрическую. Их устанавливают на электрических станциях и различных транспортных установках: автомобилях, самолетах, тепловозах, кораблях, передвижных электростанциях и др. На электростанциях они приводятся во вращение с помощью мощных паровых и гидравлических турбин, а на транспортных установках - от двигателей внутреннего сгорания и газовых турбин. В ряде случаев генераторы используют в качестве источников питания в установках связи, устройствах автоматики, измерительной техники и пр.;
электрические двигатели, преобразующие электрическую энергию в механическую; они приводят во вращение различные машины, механизмы и устройства, применяемые в промышленности, сельском хозяйстве, связи, на транспорте, в военном деле и быту. В современных системах автоматического управления их используют в качестве исполнительных, регулирующих и программирующих органов;
электромашинные преобразователи, преобразующие переменный ток в постоянный и, наоборот, изменяющие величину напряжения переменного и постоянного тока, частоту, число фаз и др. Их широко используют в промышленности, на транспорте и в военном деле, хотя в последнее десятилетие роль электромашинных преобразователей существенно уменьшилась вследствие применения статических полупроводниковых преобразователей;
электромашинные компенсаторы, осуществляющие генерирование реактивной мощности в электрических установках для улучшения энергетических показателей источников и приемников электрической энергии;
электромашинные усилители, используемые для управления объектами относительно большой мощности посредством электрических сигналов малой мощности, подаваемых на их обмотки возбуждения (управления). Роль электромашинных усилителей в последнее время также уменьшилась из-за широкого применения усилителей, выполненных на полупроводниковых элементах (транзисторах, тиристорах);
электромеханические преобразователи сигналов, генерирующие, преобразующие и усиливающие различные сигналы. Их выполняют обычно в виде электрических микромашин и широко используют в системах автоматического регулирования, измерительных и счетно-решающих устройствах в качестве различных датчиков, дифференцирующих и интегрирующих элементов, сравнивающих и регулирующих органов и др.
Классификация по роду тока и принципу действия. Электрические машины по роду тока делят на машины переменного и постоянного тока. Машины переменного тока в зависимости от принципа действия и особенностей электромагнитной системы подразделяют на трансформаторы, асинхронные, синхронные и коллекторные машины.
Трансформаторы широко применяют для преобразования напряжения: в системах передачи и распределения электрической энергии, в выпрямительных установках, устройствах связи, автоматики и вычислительной техники, а также при электрических измерениях (измерительные трансформаторы) и функциональных преобразованиях (вращающиеся трансформаторы).
Асинхронные машины используют главным образом в качестве электрических двигателей трехфазного тока. Простота устройства и высокая надежность позволяют применять их в различных отраслях техники для привода станков, грузоподъемных и землеройных машин, компрессоров, вентиляторов и пр. В системах автоматического регулирования широко используют одно- и двухфазные управляемые асинхронные двигатели, асинхронные тахогенераторы, а также сельсины.
Синхронные машины применяют в качестве генераторов переменного тока промышленной частоты на электрических станциях и генераторов повышенной частоты в автономных источниках питания (на кораблях, самолетах и т. п.). В электрических приводах большой мощности применяют также синхронные электродвигатели. В устройствах автоматики широко используют различные синхронные машины малой мощности (реактивные, с постоянными магнитами, гистерезисные, шаговые, индукторные и пр.).
Коллекторные машины переменного тока используют сравнительно редко и главным образом в качестве электродвигателей. Они имеют сложную конструкцию и требуют тщательного ухода. В устройствах автоматики, а также вразличного рода электробытовых приборах применяют универсальные коллекторные двигатели, работающие как на постоянном, так и на переменном токе.
Машины постоянного тока применяют в качестве генераторов и электродвигателей в устройствах электропривода, требующих регулирования частоты вращения в широких пределах: железнодорожный и морской транспорт, прокатные станы, электротрансмиссии большегрузных автомобилей, грузоподъемные и землеройные машины, сложные металлообрабатывающие станки и пр., а также в тех случаях, когда источниками электрической энергии для питания электродвигателей служат аккумуляторные батареи (стартерные двигатели, двигатели подводных лодок, космических кораблей и т. п.).
Классификация по мощности.Электрические машины по мощности условно подразделяют на микромашины, машины малой, средней и большой мощности.
Микромашины имеют мощность от долей ватта до 500 Вт. Эти машины работают как на постоянном, так и на переменном токе нормальной и повышенной (400 - 2000 Гц) частоты.
Машины малой мощности - от 0,5 до 10 кВт. Они работают как на постоянном, так и на переменном токе нормальной или повышенной частоты.
Машины средней мощности - от 10 кВт до нескольких сотен киловатт *.
Машины большой мощности - свыше нескольких сотен киловатт. Машины большой и средней мощности обычно предназначают для работы на постоянном или переменном токе нормальной частоты**.
Классификация по частоте вращения.Электрические машины по частоте вращения условно подразделяют на: тихоходные - счастотами вращения до 300 об/мин; средней быстроходности - 300-1500 об/мин; быстроходные - 1500 - 6000 об/мин; сверхбыстроходные - свыше 6000 об/мин. Микромашины выполняют для частот вращения от нескольких оборотов в минуту до 60000 об/мин; машины большой и средней мощности - обычно до 3000 об/мин.
Обратимость электрических машин вызвана одинаковым устройством преобразователей электрической энергии в механическую и механической в электрическую. Таким образом, электрические машины взаимозаменяемы: любой электродвигатель может использоваться в качестве генератора и наоборот, электродинамическая головка может использоваться в качестве микрофона и наоборот, и т. п. Приоритетная функция электрической машины определяет её конструктивные особенности, вследствие которых обратимость становится неравномерной. Так, электрогенератор будет иметь несколько больший КПД, чем используемый в качестве генератора соответствующий по размерам электродвигатель, электродинамический микрофон будет выдавать более качественный звуковой сигнал, чем равная по размерам динамическая головка.4.Уравнение мощностей и моментов.
 Уравнение (4.50) называется уравнением ЭДС двигателя.
Уравнение (4.50) называется уравнением ЭДС двигателя.
Для уменьшения пускового тока в цепь обмотки якоря включают добавочное сопротивление – пусковой реостат Rп и тогда
 (4.51)При пуске желательно создавать в двигателе наибольший пусковой момент
(4.51)При пуске желательно создавать в двигателе наибольший пусковой момент  .
.
С этой целью обмотка возбуждения включается на полное напряжение сети, чтобы ток I в ней и Ф были максимальны.
При пуске Rп полностью введен; когда n=n1, часть реостата выводится и т. д. (рис. 4.30, б).
Однако такой пуск не целесообразен, энергетически не выгоден, да и вся пусковая аппаратура громоздкая. Такой пуск можно выполнить для небольшого двигателя. Лучше осуществлять пуск при пониженном напряжении, при дальнейшем увеличении U до Uном .
Умножив уравнение (4.50) на ток якоря Iа, получим уравнение мощностей электродвигателя
 (4.52) где:
(4.52) где:  -мощность, потребляемая двигателем из сети;
-мощность, потребляемая двигателем из сети;
 - полная механическая мощность двигателя;
- полная механическая мощность двигателя;  - мощность потерь в цепи якоря.
- мощность потерь в цепи якоря.
Так как  , где M – полный момент на валу двигателя,
, где M – полный момент на валу двигателя,
 - угловая частота, то
- угловая частота, то  (4.53)
(4.53)
 (4.54)
(4.54)
 ;
;  ;
;  ;
; 
 (4.55) Тогда
(4.55) Тогда  (4.56)
(4.56)
 для конкретной машины.
для конкретной машины.  (4.57)
(4.57)
В установившемся режиме вращающий момент двигателя равен статическому моменту:
 (4.58) Для неустановившегося режима работы (
(4.58) Для неустановившегося режима работы (  ) появляется динамический момент
) появляется динамический момент 
где J-момент инерции всех вращающихся частей;  - угловое ускорение. Знак момента зависит от знака ускорения
- угловое ускорение. Знак момента зависит от знака ускорения  .При увеличении частоты n динамический момент положительный (
.При увеличении частоты n динамический момент положительный (  ), и складываясь со статическим моментом Мст, он увеличивает тормозной момент на валу двигателя. При уменьшении частоты n динамический момент отрицательный (
), и складываясь со статическим моментом Мст, он увеличивает тормозной момент на валу двигателя. При уменьшении частоты n динамический момент отрицательный (  ), поэтому общий тормозной момент уменьшается. Тогда уравнение моментов двигателя постоянного тока
), поэтому общий тормозной момент уменьшается. Тогда уравнение моментов двигателя постоянного тока

5.Неавтоматическая пускорегулирующая аппаратура (рубильник, пакетный выключатель, предохранитель).
К пускорегулирующим устройствам и аппаратам управления относятся: рубильники, пакетные выключатели, магнитные пускатели, пускорегулирующие сопротивления, силовые контроллеры, магнитные контроллеры, командоконтроллеры, контакторы, электромагнитные реле времени и др., а к аппаратам защиты— автоматические выключатели, реле максимального тока, тепловое реле, плавкие предохранители, защитные панели и др. Для чего служат рубильники? Рубильники служат для замыкания и размыкания электрических цепей постоянного и переменного тока напряжением не свыше 500 В.Какие бывают рубильники?
По количеству подвижных и неподвижных контактов рубильники бывают двух- и трехполюсные, а по расположению рукоятки, служащей для выключения и включения рубильника,—с центральной рукояткой, с боковой рукояткой, с центральным рычажным приводом и с боковым рычажным приводом. По расположению зажимов для присоединения проводов рубильники бывают с задним и с передним присоединением. Из каких частей состоит рубильник?
Рубильник состоит из панели, неподвижных контактов (губок), подвижных контактов (ножей) и привода (рукоятки или системы рычагов). Рубильник устанавливают в защитном металлическом корпусе.
Пакетные выключатели типа ПВ-1-10, ПВ-3-10, ПП-2-10/НЗ и др. Для чего служат пакетные выключатели?
Пакетные выключатели служат для включения и выключения силовых и осветительных электрических цепей небольшой мощности и напряжением не более 380 В.Из каких частей состоит пакетный выключатель?
Пакетный выключатель состоит из контактной системы и переключающего механизма.
Контактная система набирается из отдельных секций. Каждая секция состоит из изолятора, в пазах которого находятся неподвижные контакты с винтами для подключения проводов сети, и пружинящих подвижных контактов с фибровыми искрогасительными шайбами.
Отдельные секции собираются на скобах со стяжными болтами. Механизм переключения состоит из пружины, валика с рукояткой и пружинной шайбы. Крышка имеет по четыре фиксирующих выступа, расположенных один к другому под углом 90°, что определяет число коммутационных положений, равное четырем. Это позволяет вращать рукоятку и всю подвижную систему аппарата в обе стороны с частотой переключений не более 300 в час.
Пускатели магнитные серии ПМЕ-200
Для чего предназначены магнитные пускатели серии ПМЕ-200?
Магнитные пускатели серии ПМЕ-200 предназначены для дистанционного управления асинхронными двигателями с короткозамкнутым ротором напряжением 500 В с рабочими токами, не превышающими номинальный рабочий ток главных контактов пускателя.
Пускатели серии ПМЕ-200 со встроенными тепловыми реле также защищают электродвигатели от перегрузок недопустимой продолжительности.
Что означают буквы и цифры ПМЕ-200?
П — пускатель, М — магнитный, Е — единой общесоюзной конструкции. Цифра 2 указывает, что пускатель магнитный второй величины.
Для чего служат плавкие предохранители?
Плавкие предохранители сЛужат для защиты электрических сетей и электрооборудования крана от больших токов перегрузки и токов короткого замыкания. Принцип их действия основан на расплавлении плавких вставок при резком возрастании силы тока в цепи.
При прохождении по проводам электрического тока в них выделяется тепло и провода нагреваются. При большой перегрузке провода могут нагреваться столь значительно, что покрывающая их изоляция может воспламениться.
Во избежание подобных случаев в электропроводку включают предохранители с плавящимся проводником (с плавкой вставкой). Плавкие вставки предохранителей изготовляются из свинца, его сплавов, цинка, алюминия, меди и серебра. Плавкие вставки рассчитываются таким образом, чтобы они плавились прежде, чем температура самих проводов достигнет величины, опасной для их изоляции.
Категорически запрещается взамен калиброванных плавких вставок ставить в предохранитель скрутки из медных или других проводов.
Почему запрещается взамен калиброванных плавких вставок ставить в предохранители скрутки из медных или других проводов?
Потому что медная или другая скрутка не расплавится при коротком замыкании или перегрузке, и такой предохранитель может стать причиной пожара или выхода из строя электрооборудования.
Какие предохранители выпускает промышленность?
Промышленность выпускает следующие предохранители: предохранители с закрытыми разборными патронами без наполнителя серии ПР-2 без защелкивающих механизмов ГОСТ 3041—45 на номинальное напряжение до 220 В (габарит I) и до 500 В (габарит II) на номинальный ток патрона 15, 60, 100, 200, 350, 600 и 1000 А. В комплект предохранителя входят: патрон, две контактные стойки для переднего и заднего присоединения проводов и одна или две плавкие вставки (в зависимости от величины тока).
Предохранители НПН-20-60 выпускаются на номинальный ток б, 10, 15, 20, 25, 30, 40, 50 и 60 А, резьбовые предохранители серии ПРС типа ПРС-6 — на 6 А, ПРС-20 — на 20 А, предохранители однополюсные резьбовые ГОСТ 1138—63 типа Ц27ПК-2 —на 6,10, 15 и 20 А.
6.Регулирование частоты вращения двигателей постоянного тока
Из уравнения электрического равновесия двигателя постоянного тока с регулировочным реостатом в цепи якоря
U = E + (R Я + R*) IЯ
и формул ЭДС Е = сЕ Ф n и вращающего момента М = cM Ф IЯ можно получить формулу частоты вращения ДПТ с параллельным возбуждением:
n = (U / сЕ Ф ) – (RЯ + R*) М / сЕcM Ф 2 ,
- здесь U / сЕ Ф = nо - частота вращения идеального холостого хода при работе двигателя без потерь М = 0,
Ф - магнитный поток машины (без учёта реакции якоря Ф = ФВ).
Из полученной формулы следует, что частоту вращения ДПТ можно регулировать следующими способами:
1. Изменением магнитного потока возбуждения - полюсный способ.
2. Изменением подаваемого на якорь напряжения - якорный способ.
3. Изменением сопротивления реостата в цепи якоря - реостатный способ.
Полюсный способ
Полюсный способ регулирования частоты вращения двигателя осуществляется изменением магнитного потока возбуждения Ф = var с помощью изменения сопротивления регулировочного реостата в цепи возбуждения RРР = var .
В номинальном режиме регулировочный реостат с целью снижения тепловых потерь полностью выведен (положение 1, RРР = 0). При регулировании реостат RРР частично (положение 2) или полностью (положение 3) вводится и его сопротивление возрастает RРР á. В результате возрастает сопротивление цепи возбуждения (RРР á + RОВ), что вызывает снижение тока возбуждения IB â и уменьшение магнитного потока двигателя Ф â. Снижение магнитного потока приводит в свою очередь к увеличению частоты вращения идеального холостого хода nоá и рабочей частоты вращения якоря n á > n ном:
n = (U / сЕ Ф) – RЯ М / сЕcM Ф 2 .
Преимущества:
1. Простота;
2. Плавность регулирования частоты вращения двигателя;
3. Способ экономичен вследствие малых тепловых потерь в реостате (RРР IВ2 );
4. Большой диапазон регулирования вверх от номинала D = n / n ном = 2 : 1 и даже 5 : 1 – для специальных конструкций двигателей.
Недостатки – способ не позволяет регулировать частоту вращения вниз от номинала.
ЯКОРНЫЙ СПОСОБ
Якорный способ регулирования частоты вращения двигателя осуществляется изменением напряжения, подаваемого на якорь U = var, при независимом питании обмотки возбуждения. Для питания обмотки якоря двигателя обычно используется тиристорный регулируемый источник напряжения, с помощью которого можно плавно понижать напряжение на якоре Uâ< U ном , что приводит в свою очередь к снижению частоты вращения идеального холостого хода nоâ и рабочей частоты вращения якоря n â < n ном:
n = (U / сЕ Ф) – RЯ М / сЕcM Ф 2 .
Преимущества:
1. Плавность регулирования частоты вращения двигателя;
2. Высокая экономичность;
3. Большой диапазон регулирования вниз от номинала D = n / n ном = 1 : 10;
Недостатки – способ дорог.
NB. Якорный способ регулирования в сочетании с полюсным регулированием реостатом в цепи возбуждения позволяет в широком диапазоне плавно регулировать частоту вращения двигателя как вниз, так и вверх от номинала.
РЕОСТАТНЫЙ СПОСОБ
Реостатный способ регулирования частоты вращения двигателя осуществляется изменением сопротивления регулировочного реостата в цепи якоря R* = var.
В номинальном режиме регулировочный реостат в цепи якоря с целью снижения тепловых потерь полностью выведен (положение 1, R* = 0). При регулировании реостат частично (положение 2) или полностью (положение 3) вводится и его сопротивление возрастает R* á. В результате увеличивается сопротивление цепи якоря (R* á + RЯ), что при сохранении частоты вращения идеального холостого хода nо= const приводит к снижению частоты вращения якоря n â < n ном :
n = (U / сЕ Ф ) – (RЯ + R*) М / сЕcM Ф 2
Преимущества:
1. Простота;
2. Плавность регулирования частоты вращения двигателя;
3. Большой диапазон вниз от номинала D = n / n ном = 1 : 2
Недостатки:
1. Способ неэкономичен вследствие больших тепловых потерь в реостате (R* IЯ2 );
2. Снижается жёсткость механической характеристики, что снижает стабильность работы двигателя |dn/dM| á.
ЭЛЕКТРИЧЕСКОЕ ТОРМОЖЕНИЕ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Работа электропривода большинства производственных механизмов состоит из трех этапов: пуск в ход, технологическая операция и останов. После отключения двигателя от сети его останов (торможение) происходит под действием сил трения, при этом кинетическая энергия движущихся частей выделяется в виде тепла в узлах трения механизма и двигателя. В тех случаях, когда запас кинетической энергии велик, а силы трения малы, время торможения может составить десятки секунд и даже несколько минут.
Сокращение времени торможения, особенно когда длительность технологической операции мала, может значительно повысить производительность рабочего механизма, так как в режиме торможении обычно полезной работы не совершается. Для сокращения времени торможения в большинстве случаев применяют механические тормоза, которые имеют ряд существенных недостатков - быстрый износ трущихся поверхностей, трудность регулирования силы трения, громоздкость тормозного механизма и др.
В настоящее время для торможения электропривода широко используются тормозные свойства самого приводного двигателя, что во многих случаях позволяет отказаться от механических тормозов. Механические тормоза необходимы как запасные или аварийные, если откажет электрическое торможение, а также для удержания механизма в неподвижном состоянии при неработающем двигателе.
Во всех тормозных режимах двигатель развивает электромагнитный момент, действующий против направления вращения ротора и потому называемый тормозным моментом. Под действием тормозного момента в одних случаях происходит быстрый останов, в других - поддержание частоты вращения заданной величины.
Для сокращения времени переходных процессов двигатель постоянного тока может использоваться в нескольких режимах электрического торможения.
ТОРМОЖЕНИЕ ПРОТИВОВКЛЮЧЕНИЕМ
Для торможения ДПТ способом противовключения используется схема реверсирования - обмотка возбуждения остаётся включённой в питающую сеть, а переключатель QF из положения 1-1 переводится в положение 2-2, в результате чего обмотка якоря отключается от сети и снова включается в сеть с изменённой полярностью.
При этом изменяется направление тока якоря и направление электромагнитного момента, который теперь действует против вращающегося по инерции якоря, т.е. является тормозящим моментом.
Преимущества - способ прост и эффективен, торможение практически мгновенное.
Недостатки:1). Опасность реверсирования двигателя.
2). Очень большой тормозной ток, практически в 2 раза превышающий пусковой, что вызывает серьёзные нарушения в работе питающей сети и самого двигателя (см. Прямой пуск ДПТ).
ДИНАМИЧЕСКОЕ ТОРМОЖЕНИЕ
Для торможения ДПТ динамическим способом обмотка возбуждения остаётся включённой в питающую сеть, а переключатель QF из положения 1-1 переводится в положение 2-2, в результате чего обмотка якоря отключается от сети и замыкается накоротко или на тормозной резистор R т с целью снижения тока якоря.
Отключённый от сети U = 0 и замкнутый на резистор двигатель переходит в генераторный режим и вырабатывает электрическую энергию за счёт кинетической энергии вращающегося привода E = сЕ ФВ n .
При этом изменяется направление тока якоря IЯ = (U - E)/ RЯ и направление электромагнитного момента, который теперь действует против вращающегося по инерции якоря, т.е. является тормозящим моментом.
Преимущества - способ прост и эффективен.
Недостатки - большой тормозной ток при замыкании обмотки якоря накоротко (практически равный пусковому).
ГЕНЕРАТОРНОЕ (РЕКУПЕРАТИВНОЕ) ТОРМОЖЕНИЕ
Режим генераторного торможения возникает самопроизвольно при условии, когда частота вращения якоря n становится больше частоты вращения идеального холостого хода: n >nо.
Такой режим возникает, например, при опускании груза, когда под действием его веса частота вращения якоря увеличивается и становится больше синхронной. При этом двигатель переходит в генераторный режим, а кинетическая энергия привода превращается в электрическую энергию и поступает в питающую сеть.
Электромагнитный момент двигателя становится тормозящим, спуск груза притормаживается и тем самым ограничивается скорость опускания груза, хотя двигатель продолжает вращаться в том же направлении с повышенной частотой n >nо.
7.Автоматическая ПРА (эл.магн. реле, магн.пускатель, автоматический выключатель)
Контактор.Это электромагнитный аппарат с дистанционным управлением, предназначенный для частых включений и отключений силовой электрической цепи при нормальном режиме работы, а также для редких отключений при токах перегрузки в электроустановках напряжением до 1000 В.
Магнитные пускатели. Выключатели, работающие под действием электромагнита. Они предназначены для дистанционного управления трехфазными асинхронными двигателями с короткозамкнутым ротором напряжением до 660 В и для их защиты от перегрузок, если есть тепловое реле, и автоматического отключения двигателя при снижении напряжения на 50-60% номинального. Управление пускателями осуществляется обычно кнопками.
Электромагнитные реле. Это аппараты, в которых при изменении управляющего (входного) сигнала происходит скачкообразное изменение управляемого (выходного) сигнала.
Реле времени.Это аппараты для создания выдержки времени между срабатыванием двух или нескольких аппаратов. При автоматизации технологических процессов может возникнуть необходимость производить операции в определенной временной последовательности.
|
из
5.00
|
Обсуждение в статье: Рабочие характеристики двигателей постоянного тока |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы