 |
Главная |


Экзаменационный билет №2
|
из
5.00
|
Экзаменационный билет №1
1. Какие системы управления относят к следящим? Приведите примеры следящих систем.
Следящая система управления — это система автоматического управления, в которой управляемая величина воспроизводит произвольно изменяющееся задающее воздействие.
Пример следящей системы — радиолокационная станция, в её задачи входит сопровождение цели с заранее неизвестным законом движения.
О динамических свойствах следящей системы можно судить по величине ошибки. Также сигнал ошибки в следящих системах является сигналом, в зависимости от величины и «характера» которого осуществляется управление объектом. Различают системы статические и астатические. Статические системы управляются значением ошибки: есть ошибка - есть управление в системе, больше величина ошибки - сильнее реакция системы. Так, если целью сопровождения радиолокационной станции является неподвижно висящий вертолёт, то станция, отработав ошибку, "замирает". Если цель-вертолёт начнёт движение, то появится ошибка и система "оживёт". Если траектория движения цели будет круговой с постоянной скоростью, на постоянной высоте с центром в точке, где находится радиолокационная станция, то ошибка (её "характер") будет постоянной. Системы способные автоматически выполнять свои функции при наличии ошибки постоянной величины называют астатическими.
Типичным представителем следящей системы является система согласования угловых положений двух валов(осей), один из которых является командным( вращается оператором или от какого-то устройства), а другой вал(вал нагрузки) – исполнительный. Оператор, поворачивая командный вал, задает тем самым требуемый угол поворота нагрузки, регулируемый исполнительным устройством.
Типовая схема одноканальной следящей системы:

УН – усилитель напряжения
УМ – усилитель мощность
ИМ – исполнительный механизм
КУ – коэффициент усиления
Р – редуктор
Н – нагрузка
2. В чем заключается сущность использования принципа подчиненного регулирования?
Большое распространение получили в настоящее время системы, построенные по принципу подчиненного регулирования, который поясняется рисунке. В системе предусматривается n контуров регулирования со своими регуляторами Wpi(p), причем выходной сигнал регулятора внешнего контура является предписанным значением для внутреннего контура, т.е. работа каждого внутреннего контура подчинена внешнему контуру.

Структурная схема САУ подчиненного регулирования
Два главных достоинства определяют работу систем подчиненного регулирования.
1. Простота расчета и настройки. Настройка в процессе наладки ведется начиная с внутреннего контура. Каждый контур включает в себя регулятор, за счет параметров и структуры которого получаются стандартные характеристики. Причем в каждом контуре компенсируется наибольшая постоянная времени.
2. Удобство ограничения предельных значений промежуточных координат системы. Это достигается за счет ограничения определенным значением выходного сигнала регулятора внешнего контура.
Вместе с тем, из принципа построения системы подчиненного регулирования очевидно, что быстродействие каждого внешнего контура будет ниже быстродействия соответствующего внутреннего контура. Действительно, если в первом контуре частота среза л.а.х. составит 1/2Tμ , где 2Tμ- сумма малых нескомпенсированных постоянных времени, то даже при отсутствии во внешнем контуре других звеньев с малыми постоянными времени, частота среза его л.а.х. будет 1/4Tμ и т.д. Поэтому системы подчиненного регулирования редко строятся с числом контуров больше трех.
Экзаменационный билет №2
1. Преобразователь цифрового кода во временной интервал(ПК-ШИМ).

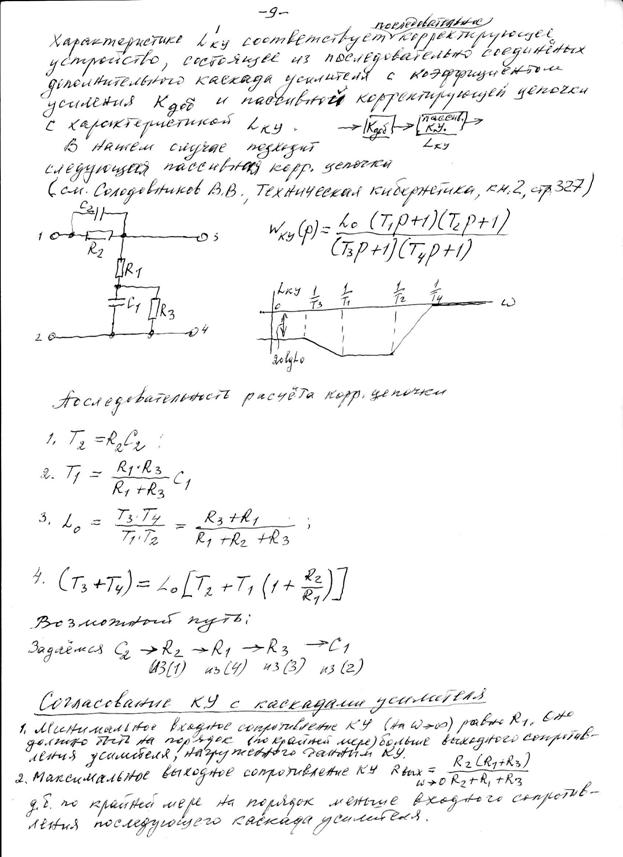
2. Коррекция следящих систем по методу желаемых ЛЧХ.

Диаграммы Солодовникова — устанавливают связь между величиной перерегулирования σ%, временем переходного процесса tрег, максимальным значением вещественной части АФЧХ Pmax и частотой среза ωср.

Например, σ% = 25 % и tрег = 2 с.
Значению σ% = 25 % на графике σ(Pmax) соответствует значение tрег =  на графике tрег(Pmax).
на графике tрег(Pmax).
Отсюда можно найти ωп =  = 5,34 рад/c.
= 5,34 рад/c.
Частота среза находится из условия: ωср = (0,6÷0,9)ωп.
По диаграммам для определения запасов устойчивости определяют запас устойчивости по фазе Δφ и амплитуде ΔL в зависимости от перерегулирования σ%.

|
из
5.00
|
Обсуждение в статье: Экзаменационный билет №2 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы