 |
Главная |


Законы частотного регулирования скорости асинхронного двигателя.
|
из
5.00
|
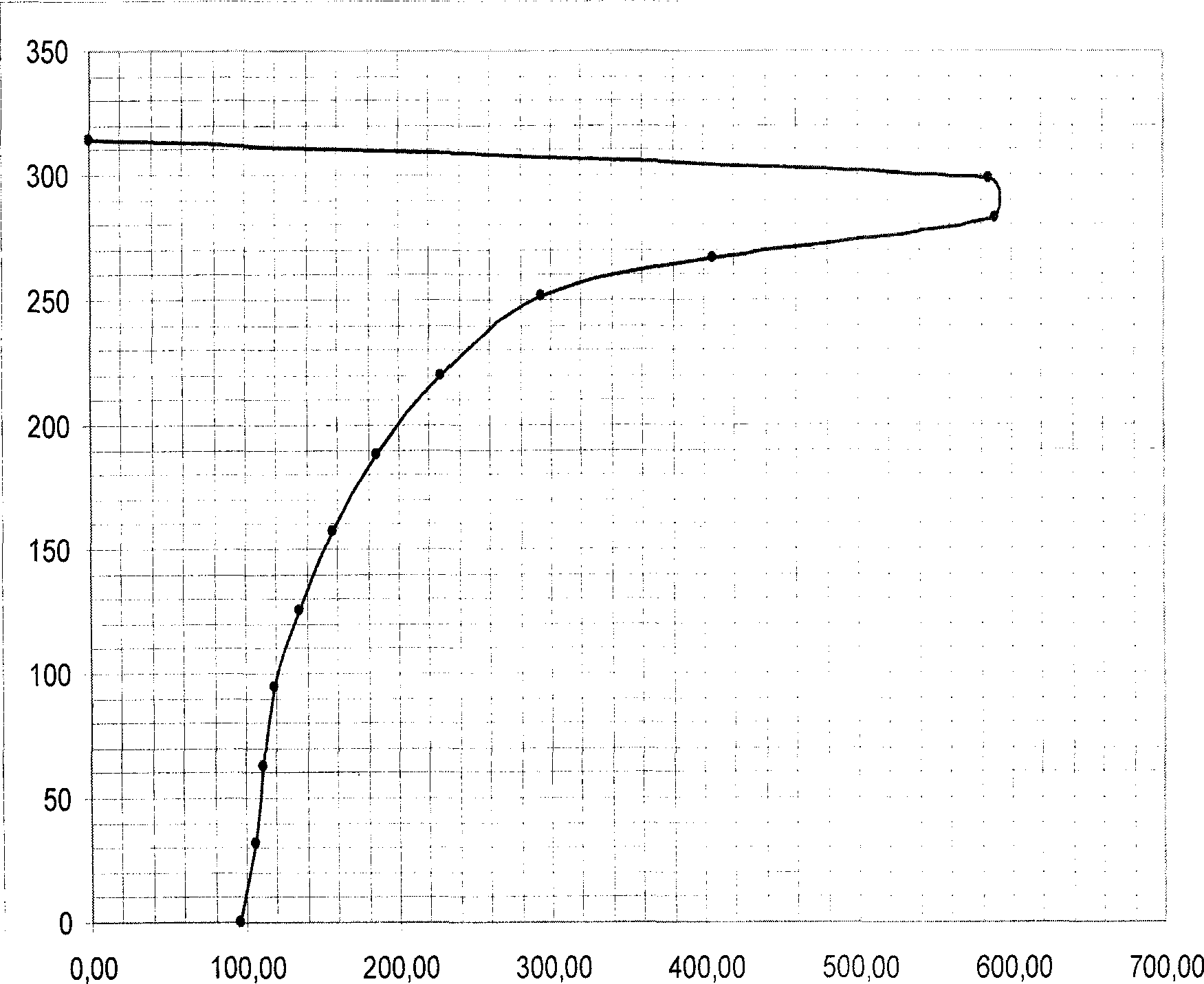
Как уже было отмечено, что наиболее простой закон частотного регулирования  не обеспечивает постоянства критического момента
не обеспечивает постоянства критического момента
и тем самым перегрузочной способности АД при широком изменении частоты напряжения питания. Поэтому такой закон может быть использован при малых отклонениях частоты от номинального значения. Требуемые параметры механической характеристики АД в широком изменении частоты могут обеспечить более сложные законы регулирования , которые получили широкое применение при частотном управлении АД.f = 50 Гц,



| 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 |

| 314 | 298,3 | 282,6 | 266,9 | 251,2 | 219,8 | 188,4 | 157 | 125,6 | 94,2 | 62,8 | 31,4 | 0 |

| 0 | 0,05 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,85 | 0,9 | 1 |
| M H*м | 0,00 | 585,51 | 589,55 | 406,27 | 293,95 | 227,99 | 185,60 | 156,29 | 134,88 | 118,58 | 111,82 | 105,78 | 95,46 |

f =25 Гц;



| 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 |
|
| 157 | 149,2 | 141,3 | 133,5 | 125,6 | 109,9 | 94,2 | 78,5 | 62,8 | 47,1 | 31,4 | 15,7 | 0 |

| 0 | 0,025 | 0,05 | 0,1 | 0,15 | 0,2 | 0,25 | 0,3 | 0,35 | 0,4 | 0,425 | 0,45 | 0,5 |
| M H*м | 0,00 | 376,97 | 535,86 | 534,7 | 449,48 | 374,26 | 318,1 | 274,8 | 241,33 | 214,83 | 203,58 | 193,42 | 175.8 |

f =5 Гц;




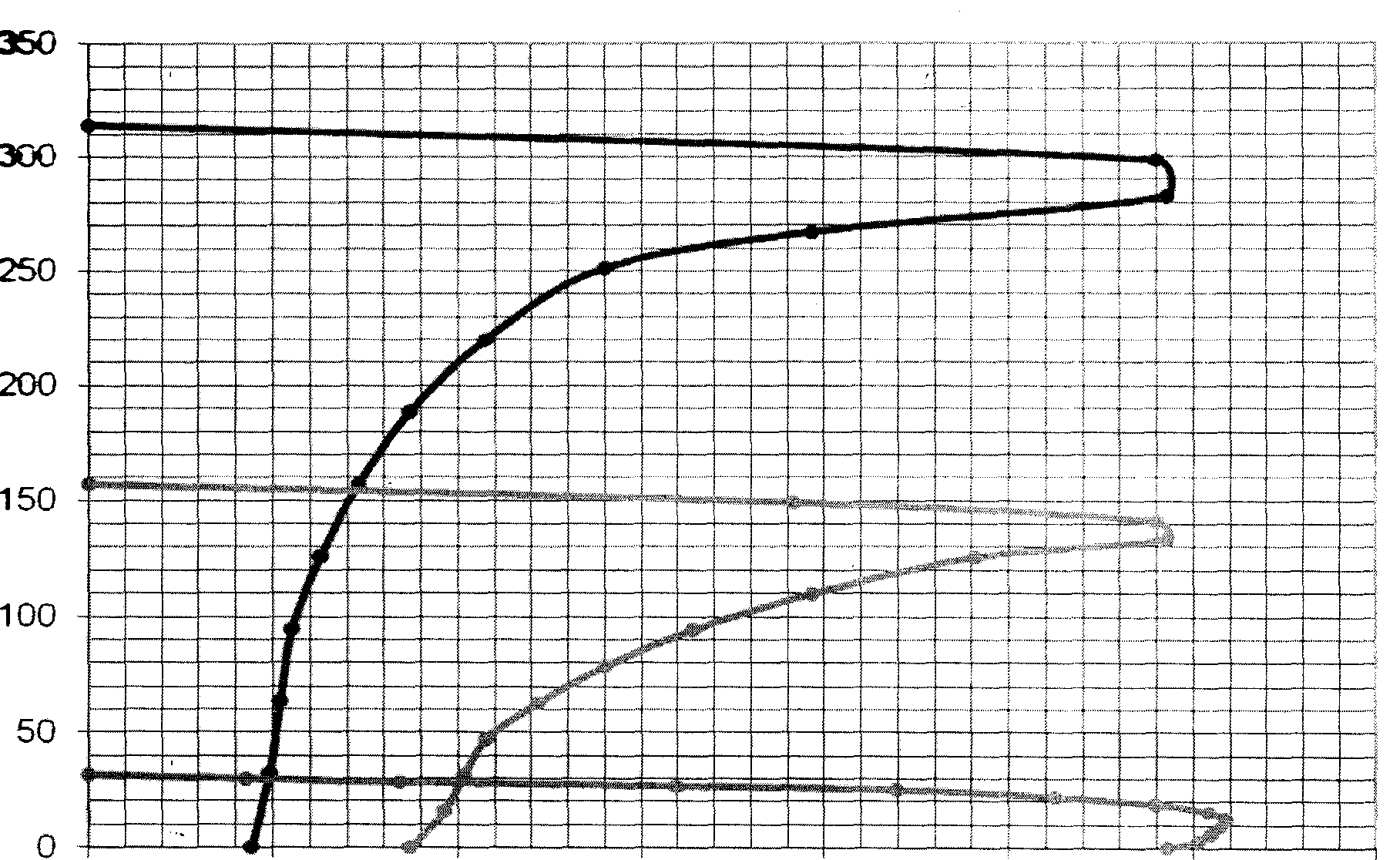
Расчет механических характеристик при постоянстве потокосцепления статора.
Такой закон частного регулирования обеспечивает постоянство критического момента во всём диапазоне регулирования скорости.
Относительная критическая скорость ротора:




Критический момент:

Где:

ЭДС за активным сопротивлением по ( схеме замещения):

Выражение для расчета момента как частный случай – пусковой момент:

f =5 Гц;

| 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 | 314 |

| 314 | 298,3 | 282,6 | 267 | 251,3 | 220 | 220 | 157 | 125,9 | 94,6 | 63,3 | 32 | 0 |

| 0 | 0,05 | 0,1 | 0,2 | 0,3 | 0,4 | 0,4 | 0,6 | 0,7 | 0,8 | 0,85 | 0,9 | 1 |
| M H*м | 0,0000 | 579,42 | 585,77 | 393,39 | 280,06 | 215,15 | 215,15 | 145,97 | 125,59 | 110,16 | 103,79 | 98,09 | 88,38 |


f =25 Гц;



| 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 | 157 |

| 157 | 149,2 | 141,3 | 133,5 | 125,6 | 109,9 | 94,2 | 78,5 | 62,8 | 47,1 | 31,4 | 15,7 | 0 |

| 0 | 0,025 | 0,05 | 0,1 | 0,15 | 0,2 | 0,25 | 0,3 | 0,35 | 0,4 | 0,425 | 0,45 | 0,25 |
| M H*м | 0 | 383,5 | 579,42 | 585,77 | 481,67 | 393,39 | 328,23 | 280,1 | 243,6 | 215,2 | 203,22 | 192,5 | 174,1 |

f =5 Гц;


| 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 | 31,4 |
|
| 31,4 | 29,8 | 28,3 | 26,7 | 25,1 | 22 | 18,8 | 15,7 | 12,6 | 9,42 | 6,28 | 3,14 | 0 |

| 0 | 0,005 | 0,01 | 0,02 | 0,03 | 0,04 | 0,05 | 0,06 | 0,07 | 0,08 | 0,085 | 0,09 | 0,1 |
| M H*м | 0 | 85,57 | 168,3 | 319,2 | 439,34 | 525,19 | 579,42 | 608,1 | 617,78 | 614,47 | 609,41 | 602,7 | 585,77 |

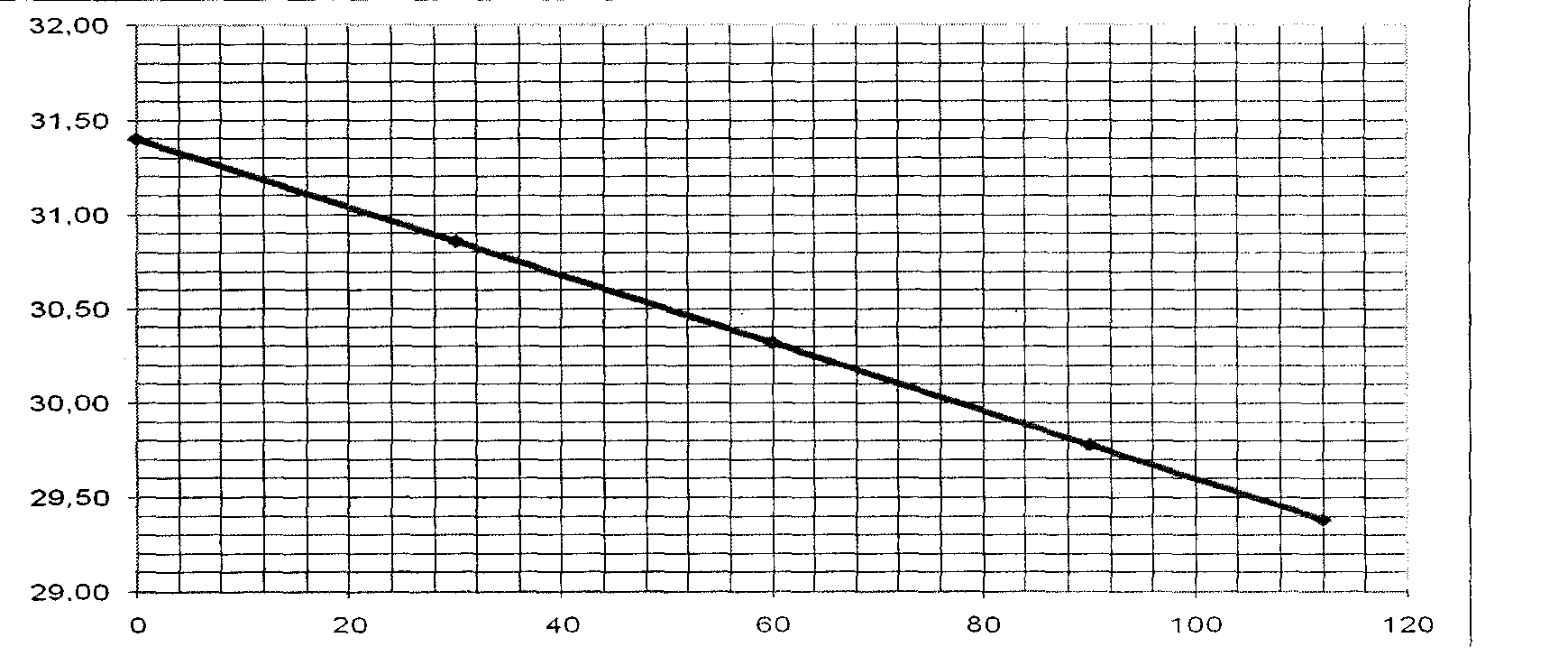
Расчет механических характеристик при постоянстве тока сцепления ротора.
При  эта характеристика будет линейной , как и механическая характеристика двигателя постоянного тока с независимым возбуждением, т.е механическая характеристика АД при изменении частоты аналогичны механическим характеристикам двигателя постоянного тока при изменении напряжения якоря.
эта характеристика будет линейной , как и механическая характеристика двигателя постоянного тока с независимым возбуждением, т.е механическая характеристика АД при изменении частоты аналогичны механическим характеристикам двигателя постоянного тока при изменении напряжения якоря.
Потокосцепление ротора:

где 
Скорость вращения ротора:

f=50 Гц;

| 314 | 314 | 314 | 314 | 314 |
| M H*м | 0 | 30 | 60 | 90 | 112 |

| 314 | 313,46 | 312,92 | 312,38 | 311,98 |

f=25 Гц;

|
| 157 | 157 | 157 | 157 | 157 |
| M H*м | 0 | 30 | 60 | 90 | 112 |

| 157,00 | 156,46 | 155,92 | 155,38 | 154,98 |

f=5 Гц;



| 31,4 | 31,4 | 31,4 | 31,4 | 31,4 |
| M H*м | 0 | 30 | 60 | 90 | 112 |

| 31,40 | 30,86 | 30,32 | 29,78 | 29,38 |

Система векторного регулирования скорости асинхронного электродвигателя.
Данный вид системы обеспечивает характеристики асинхронного электропривода, близкие характеристики постоянного тока. Эти свойства системы достигаются за счет разделения каналов регулирования потокосцепления и скорости вращения электродвигателя, не достижимого при использовании скалярного управления. При построении указанных систем используется векторное представление физических величин, Преобразователи, использующие данный принцип управления, имеют сравнительную высокую стоимость и применяются в механизмах повышенными требованиями к качеству регулирования скорости, например, приводы в станках, лифтах, кранах. Следует также отметить, что существует четкая тенденция к отказу от датчиков скорости и разработке алгоритмов определения состояния двигателя по измеренным фазным токам инапряжениям, что ведет к снижению стоимости и повышению надежности системы.
|
из
5.00
|
Обсуждение в статье: Законы частотного регулирования скорости асинхронного двигателя. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы