 |
Главная |


Закон «преломления» светового луча
|
из
5.00
|
А. Закон "преломления" светового луча. Критики СТО ограничиваются, как правило, анализом эффектов "сокращения" масштабов движущихся тел и "замедлением" времени. К сожалению, они не принимают во внимание, что движущийся объект пролетает мимо них с наблюдаемой скоростью v(t), и наблюдатель по мере движения объекта вынужден рассматривать его под различными углами наблюдения q. При этом возникает ряд интересных явлений, с частью которых мы уже познакомились.
Угол наблюдения q образован двумя векторами: вектором скорости движущегося тела и вектором, направленным вдоль светового луча от движущегося источника к наблюдателю. Теоретически он может меняться от 0 до 180 градусов в системе отсчета, связанной с наблюдателем. В системе отсчета, связанной с движущимся объектом, этот луч будет иметь другое направление, т.е. идти под другим углом q' (меняясь тоже от 0 до 180 градусов).
Из преобразования Лоренца известны следующие соотношения:

где: f и f ' частоты принимаемого и излучаемого сигналов соответственно.
Запишем теперь угол расхождения между лучами (угол аберрации), который нам понадобится в дальнейшем:
Допустим, что движущийся объект это линейка длиной Dx', ориентированная вдоль вектора скорости V . Нетрудно видеть, что наблюдаемая длина линейки будет зависеть от V и q. Кажущаяся длина линейки есть (2.5):
 .
.
Формула, связывающая Dx и Dx', позволяет получить очень важное соотношение, которое можно назвать законом "преломления". Для этой цели умножим Dx на sinq и преобразуем это произведение.
 (4.1)
(4.1)
Физический смысл полученного выражения можно проиллюстрировать рис. 5.
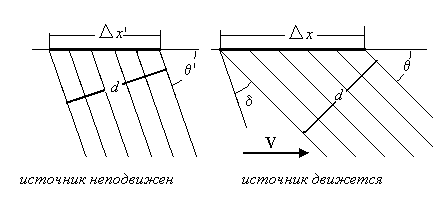
Рис 5.
Величина d это толщина светового луча. Она сохраняется постоянной в любой инерциальной системе отсчета. Если учесть, что ширина этого луча не зависит от выбора инерциальной системы отсчета, можно сформулировать закон "преломления" света при переходе наблюдателя из одной инерциальной системы отсчета в другую:
При переходе наблюдателя из одной системы отсчета в другую световой луч не меняет своего сечения; он поворачивается на угол аберрации d = q' - q.
Б. Наблюдаемая форма движущегося объекта. Полученное соотношение можно с успехом использовать для описания видимой формы движущегося объекта. Пусть мимо нас со скоростью V, параллельной оси x, пролетает куб, ориентированный по осям x,y,z или x',y',z'. Пусть лучи от неподвижного куба размером а х а направлены в точку встречи с наблюдателем под углом q’ (рис. 6А).
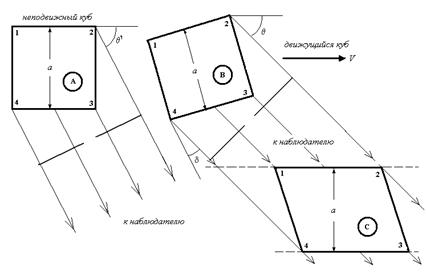
Рис. 6
Если куб находится очень далеко от нас, то человеческий глаз увидит плоское изображение. Однако если человек знает, что форма предмета куб, его мозг быстро восстановит "изображение". Наблюдателю будет казаться, что летящий куб "развернут" на угол d по отношению к своей истинной ориентации (рис. 6 В).
Отметим следующее:
1. Наблюдаемая форма куба сохраняется, но изображение будет поворачиваться при изменении угла наблюдения на угол d(q). Ориентация куба в движении вдоль оси х напоминает фигуру высшего пилотажа под названием "кобра". Наибольший наблюдаемый «поворот» куба будет при критическом угле наблюдения. Это напоминает во многом явление либрации.
2. Пусть цвет куба зеленый, а его скорость порядка 0,7с. Цвет куба при изменении угла наблюдения будет меняться от фиолетового при малых углах и до красного больших скоростях. Изменение цвета - явление, известное под названием эффект Допплера.
Описанная выше визуальная форма движущегося куба есть сугубо субъективное явление, полученное при участии головного мозга. Это субъективная кажимость (как говорят: "обман зрения"). Теперь необходимо рассмотреть объективную кажимость (объективное явление), т.е. то, что мы будем измерять на самом деле, например, с помощью оптического дальномера.
В. Измеряемая форма движущегося объекта. Оставим в стороне иллюзии, связанные с субъективным человеческим восприятием (оптической иллюзией). Реальная форма объекта может быть получена методами радиолокации или иными объективными оптическими методами измерений расстояния с помощью световых лучей или электромагнитных волн. Однако нам нет необходимости использовать столь сложные средства, поскольку мы знаем закон "преломления" светового луча. Результаты измерений покажут, что (рис. 6 С):
1. Измеряемая с помощью световых лучей форма движущегося куба меняется,хотя с кубом на самом деле не происходит никаких изменений.
2. Изменение измеряемой формы куба связано с изменением направления фронта светового луча.
Закон «преломления» светового луча позволяет сравнительно просто определить наблюдаемую форму движущегося объекта. Например, если вписать в куб сферу, можно описать изменение ее формы при движении.
Локация Венеры
Прежде, чем переходить к экспериментам, связанным с локацией Венеры, рассмотрим три модели определения расстояния радиолокационным способом. Допустим, что мимо нас со скоростью V движется объект, расстояние до которого нам необходимо определить методом радиолокационных измерений. Для этой цели мы посылаем электромагнитный импульс к этому объекту и принимаем отраженный сигнал. Измеряя время распространения сигнала до объекта и обратно, и зная скорость света, мы сможем определить расстояние до объекта. От РЛС до объекта сигнал распространяется без искажений. Мы будем считать, что от РЛС сигнал распространяется со скоростью света без искажений, а отраженный сигнал искажается. Здесь возможны три различных варианта исчисления времени возвращения сигнала:
1) При распространении к РЛС скорость света и скорость движения объекта складываются по закону параллелограмма (классическая механика Ньютона).
2) Релятивистский вариант (специальная теория относительности). Время распространения сигнала от РЛС к объекту равно времени возвращения отраженного сигнала к РЛС.
3) Вариант, учитывающий «деформацию» пространственного отрезка при возвращении отраженного сигнала к РЛС.
Не приводя простых расчетов, выпишем формулы для этих трех случаев:
1) Первый вариант приводит к следующему значению времени прохождения сигнала «РЛС – объект – РЛС  . При малых скоростях относительного движения мы будем иметь
. При малых скоростях относительного движения мы будем иметь  .
.
2) Релятивистский вариант дает простой результат  .
.
3) Вариант с учетом «деформации»  . При малых скоростях мы будем иметь
. При малых скоростях мы будем иметь  . Таким образом, первый и третий варианты при малых скоростях дают одинаковый результат с точностью до членов (V/c)2.
. Таким образом, первый и третий варианты при малых скоростях дают одинаковый результат с точностью до членов (V/c)2.
А. Локация Венеры. Теперь мы можем обсудить результаты локации Венеры, приведенные в [7], [8]. Поскольку детальное описание приведено в указанной литературе, мы приведем цитаты, характеризующие эти измерения [7]:
«… Радиолокация Венеры в 1961 г. впервые дала возможность преодолеть технический барьер и выполнить решающий эксперимент по проверке относительной скорости света в пространстве. Предполагалось, что радар даст погрешность ± 1,5 км, и при этом из-за вращения Земли в вычисленных расстояниях могла возникнуть разность до 260 км в зависимости от того, какую принять из двух моделей для распространения волн. Венера наблюдалась в нижнем соединении.
В [3] на рис. 4 значения большой полуоси орбиты Земли – астрономические единицы (а.е.), полученные по ньюкомбовским орбитам Земли и Венеры и вычисленные по лазерным наблюдениям в Мильстоуне с использованием эйнштейновской модели (с - модели) для распространения света; при этом были обнаружены чрезмерно большие вариации в значении а.е., превосходящие иногда 2000 км….»
Действительно если экспериментально обнаруженные вариации иногда превосходят 2000 км при максимально возможном ожидаемом отклонении в 260 км, это уже не «погрешность вычислений», а непригодность теории. Для сравнения заметим, что «ньютоновский вариант» укладывается в пределы ошибок измерений ± 1,5 км. Продолжим цитирование:
«…Естественно, астрономическая единица имеет единственное значение, вариации же наблюдаемой величины превышали максимальное значение всех возможных ошибок. Вариации а.е. содержали суточную компоненту, пропорциональную скорости вращения Земли, тридцатидневную компоненту , пропорциональную скорости движения системы Земля – Луна и синодическую компоненту, пропорциональную относительным скоростям.
Я провел анализ восьми радарных наблюдений Венеры, опубликованных в 1961 г. [4], используя две модели: с и с + v. Результаты были опубликованы в 1969 г. В статье «Радарная проверка относительной скорости света в пространстве» [5]. На рис. 1 в [5] представлен график разностей между средними гелиоцентрическими радиус-векторами Венеры (вычисления велись по таблицам Ньюкомба) и 1) Ньюкомбовскими возмущенными радиусами – эта разность обозначена через N , и 2) радиусами, найденными по радарным измерениям расстояний для эйнштейновской с - модели (Е) и 3) ими же для галилеево-ньютоновской c + v - модели (G). Все разности выражены в миллионных долях а.е.
Так полный анализ с – модели по всем данным радиолокации дал значение планетных масс почти такие же, как у Ньюкомба, и при этом в Мильстоуне использовалась эйнштейновская с – модель [3], то кривая Е должна совпадать с N с точностью до максимально возможных ошибок в наблюдениях. Однако проанализированные мною наблюдения свидетельствуют против с – модели Эйнштейна, поскольку разности N – E значительно превосходят ошибку.
Точки на кривой G представляют значения, полученные по эфемеридам, которые я вычислил по методу Коуэлла для численного интегрирования уравнений движения. Хорошее согласие между эфемероидными точками и кривой G неопровержимо свидетельствует в пользу с + v - модели, т.е. подтверждает ньютоновскую модель движения света в пространстве…»
Итак, эксперимент опровергает предсказания специальной теории относительности. Но он не противоречит ни первому варианту, рассмотренному выше, ни третьему варианту. Есть еще эксперименты, не согласующиеся со СТО, но мы их рассматривать не будем.
Заметим, что аналогичная ситуация возникла в 1961 году. Тогда группа ученых, возглавляемых академиком В.А. Котельниковым, провела локацию Венеры другим способом и тоже обнаружила расхождения с предсказаниями теории относительности. Ученые были поставлены в такое положение, когда им пришлось «оправдываться» за эксперименты (природу), не оправдавшие надежды релятивистов.
Когда-то некий экспериментатор обратился к Эйнштейну, утверждая, что теория относительности противоречит его экспериментам. На это Эйнштейн ответил: «Тем хуже для эксперимента». Но это хуже и для научной истины, на которую опирается наука.
Б. Астероиды. Драматической может оказаться ситуация при возможной бомбардировке Земли блуждающим астероидом. Здесь ошибка в вычислениях может иметь катастрофические последствия для Человечества. Задумайтесь об этом апологеты теории относительности.
В . Второй «Gedanken Experiment» Эйнштейна . Теперь нам можно познакомиться с одним из «мысленных экспериментов» А. Эйнштейна, чтобы понять причину неудач специальной теории относительности. Обратимся к [9], где дано краткое описание второго эксперимента.
«В т о р о й о п ы т [9]. Сравнение хода часов. При сравнении хода часов, связанных с системами отсчета, движущихся друг относительно друга, необходимо помнить, что нельзя одни часы в системе S сравнить с одними часами в системе S’, так как часы пространственно совпадают друг с другом лишь в один момент времени. … Пусть в той точке, где расположены часы в системе S’, находится источник света (рис. 7).
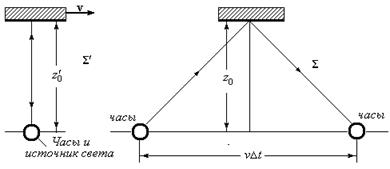
Рис. 7
Световой сигнал, испущенный перпендикулярно к v, отразится зеркалом … и вернется обратно. Для наблюдателя в S’ время, необходимое для этого равно Dt’ = 2z0/c
Наблюдатель, покоящийся в S, измерит это время посредством пары часов… Так как скорость света не зависит от системы отсчета, ….
 (15.4)
(15.4)
Интересно отметить, что для наблюдателя, покоящегося в системе S, время Dt больше, нежели собственное время. Это явление называется «замедлением времени»».
Комментарий. Напомним, что мы до сих пор придерживались классической концепции пространственно-временных отношений и не столкнулись с не интерпретируемыми явлениями. Мы предложим объяснение, оставаясь в рамках этой концепции.
Предварительное замечание. Световой луч, достигнув движущейся поверхности, отражается от нее. Точка отражения становится новым (вторичным) источником светового сигнала. В силу этого в системе отсчета S время возвращения светового луча будет искажено (эффект «деформации» расстояния). Оно будет отличаться от действительного времени прохождения. Здесь мы воспользуемся тем, что в системе отсчета любого источника излучения свет не претерпевает искажений.
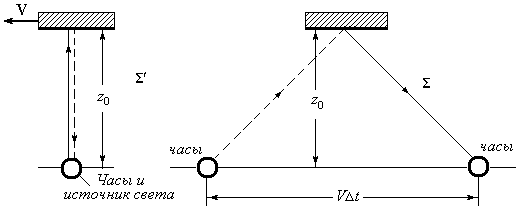
Рис. 8
Время прямого прохождения от часов к зеркалу в собственной системе отсчета источника излучения (сплошная линия на левой фигуре рис. 8) равно DT = z0/ c. Лучи, имеющие искажения, показаны на рис. 8 пунктиром.
Время обратного прохождения собственной системе отсчета точки отражения как источника (сплошная линия на правой фигуре рис. 8) равно  . В системе отсчета, связанной с источником света, световой луч идет в обратном направлении как бы «медленнее», чем в прямом направлении. На рис. 8 сплошной линией показаны не «деформированные» участки пути света, а пунктирными – «деформированные».
. В системе отсчета, связанной с источником света, световой луч идет в обратном направлении как бы «медленнее», чем в прямом направлении. На рис. 8 сплошной линией показаны не «деформированные» участки пути света, а пунктирными – «деформированные».
Таким образом, действительное время прохождения луча равно  . Тот же результат получается в системе отсчета, связанной с зеркалом. Он не зависит от того, в какой инерциальной системе мы измеряем время прохождения. В результате учета «деформации» расстояния эффект «замедления времени» исчезает. Никакого «замедления времени» в природе не существует! Нет и «сжатия» масштабов вдоль направления движения.
. Тот же результат получается в системе отсчета, связанной с зеркалом. Он не зависит от того, в какой инерциальной системе мы измеряем время прохождения. В результате учета «деформации» расстояния эффект «замедления времени» исчезает. Никакого «замедления времени» в природе не существует! Нет и «сжатия» масштабов вдоль направления движения.
|
из
5.00
|
Обсуждение в статье: Закон «преломления» светового луча |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы