 |
Главная |


Составление расчетной схемы механической части электропривода
|
из
5.00
|
Для теоретического исследования реальную механическую часть электропривода (рисунок 2) заменяем динамически эквивалентной приведенной расчётной схемой, состоящей из сосредоточенных инерционных элементов, соединённых между собой упругими связями, и обладающей таким же энергетическим запасом, как и реальная исходная система привода. Параметрами эквивалентной приведенной расчётной схемы являются суммарные приведенные моменты инерции масс, образованные приведенными массами, связи между которыми приняты жёсткими, и эквивалентные приведенные жёсткости упругих механических связей.
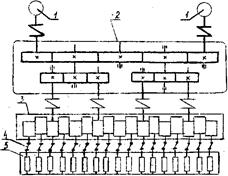
Рисунок 2 - Кинематическая схема механизма
Электропривод состоит из следующих кинематических элементов:
1 - электродвигатель;
2 - редуктор;
3 - шестерная клеть;
4 - универсальные шпиндели;
5 - рабочая клеть.
Момент инерции муфт между двигателем и редуктором равен 16 кг*м2 ,момент инерции муфт между редуктором и шестерной клетью равен 40,2 кг*м2, одного шпинделя - 0,003 кг*м2. Момент инерции редуктора, приведенный к валу двигателя, равен 30% от Jдв.
Количество шпинделей -17, количество рабочих роликов -17, опорных - 15.
Механическая часть электропривода листоправильного стана представляет собой трехмассовую систему, состоящую из роторов (якорей) двигателей с полумуфтами на валах - J1, редуктора с полумуфтами на его входном и выходном валах - J2 и рабочий орган машины, также с полумуфтами на входном валу - J3. Упругими звеньями данной системы являются жесткости соединительных муфт С12 и С23.
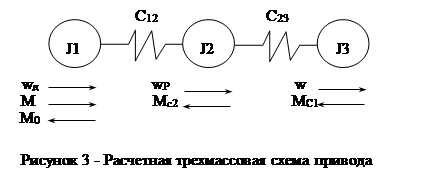
Рассчитаем параметры полученной схемы.
Момент инерции первой массы:
 (9)
(9)
где J  пм1 - момент инерции полумуфт на валах двигателей.
пм1 - момент инерции полумуфт на валах двигателей.
Момент инерции редуктора с полумуфтами на его входном и выходном валах (учитывая, что момент инерции редуктора, приведенный к валу двигателя, равен 30% от J дв) равен:
 (10)
(10)
где Jпм2 - момент инерции полумуфты на выходном вале редуктора.
Момент инерции рабочего органа привода с полумуфтами на входном валу, приведенный к валу двигателя, рассчитывается по следующему выражению:
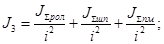 (11)
(11)
где J рол – суммарный момент инерции рабочих и опорных роликов;
J шп - момент инерции шпинделей;
J пм - момент инерции полумуфт;
i – передаточное отношение редуктора.
Определим момент инерции ролика:
 (12)
(12)
где L - длина ролика, м;
D - диаметр ролика, м;
 - плотность материала( =7,66*103 кг/м3).
- плотность материала( =7,66*103 кг/м3).
Учитывая количество рабочих и опорных роликов, получим:
 (13)
(13)
Момент инерции шпинделей:
 (14)
(14)
Тогда момент инерции рабочего органа будет равен:

Жесткость муфты между редуктором и шестерной клетью, приведенная к валу двигателя:
 .(15)
.(15)
Учитывая, что при параллельном соединении упругих элементов жесткости складываются, найдем жесткости соединительных муфт С12 и С23,которые являются упругими звеньями трехмассовой системы:
 (16)
(16)
где См1 - жесткость соединительной муфты между двигателем и редуктором.
 (17)
(17)
Расчет переходных процессов в трехмассовой системе сложен, поэтому преобразуем систему в двухмассовую.
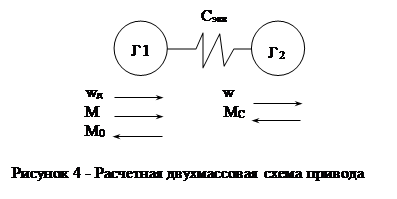 |
Рассчитаем параметры схемы. Эквивалентная жесткость двухмассовой расчетной схемы:
 (18)
(18)

 (19)
(19)
Переход и обоснование перехода к одномассовой расчетной схеме будет приведен ниже.
|
из
5.00
|
Обсуждение в статье: Составление расчетной схемы механической части электропривода |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы