 |
Главная |


Расчет переходных процессов в электроприводе за цикл работы
|
из
5.00
|
Для получения более простых передаточных функций регуляторов необходимо перейти от двухмассовой расчетной схемы к одномассовой расчетной схеме.
Обоснование перехода к одномассовой расчетной схеме:
- используются только обратные связи по переменным двигателя;
- частота собственных колебаний:
 (42)
(42)
- условие перехода:  .
.
Как показано ниже Т привода составляет 0,0258, тогда  . Тогда условие перехода выполняются (
. Тогда условие перехода выполняются (  ) и, следовательно, можно перейти к одномассовой расчетной схеме.
) и, следовательно, можно перейти к одномассовой расчетной схеме.
Суммарный момент инерции одномассовой расчетной схемы будет равен:
 .
.
Одномассовая расчетная схема представлена на рисунке 11
Рисунок 11 - Одномассовая расчетная схема
При регулировании зависимость момента допустимого по нагреву двигателя от скорости должна повторять зависимость момента статического от скорости.
Для управления приводом будем использовать двухконтурную систему автоматического регулирования с вольт/частотным управлением с последовательной коррекцией звеньев, с внутренним контуром регулирования момента и внешним контуром регулирования скорости.
При вольт/частотном управлении организуется два канала управления: канал управления частотой питания и канал управления напряжением. Стабилизация скорости осуществляется путем регулирования напряжения в функции частоты и в функции нагрузки.
Рассмотрим канал регулирования частоты.
Разлаживая уравнения динамической механической характеристики в ряд и линеаризуя полученные уравнения в окрестности точки М=0, s=0, получим линеаризованную модель асинхронного двигателя, справедливую для  .
.
Вследствие того, что в асинхронном электроприводе сложно измерять момент двигателя, вместо регулирования момента по отклонению применяют регулирование по возмущению. Т.к. возмущающим воздействием для контура регулирования момента является скорость, то будем вводить положительную обратную связь по скорости, с коэффициентом передачи  .
.
Регулировать скорость двигателя будем по отклонению, вводя отрицательную обратную связь по скорости.
Структурная схема канала регулирования частоты представлена на рисунке 12.
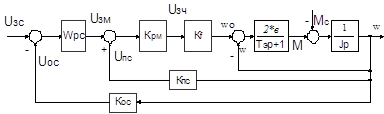
Рисунок 12 - Структурная схема канала регулирования частоты
Рассмотрим контур регулирования момента.
Для статического режима:
 (43)
(43)
Нулевая ошибка будет обеспечена, если:

 .(44)
.(44)
Максимальное значение момента двигателя:
 .(45)
.(45)
При вольт/частотном управлении с  :
:
 (46)
(46)  (47)
(47)
Электромагнитная постоянная времени:
 (48)
(48)
Жесткость механической характеристики:
 (49)
(49)
Коэффициент передачи преобразователя по частоте определяется отношением максимального сигнала на выходе преобразователя к максимальному сигналу на выходе регулятора момента:
 .(50)
.(50)
Максимальное значение момента ограничения равно критическому моменту естественной характеристики двигателя:
 (51)
(51)
Из уравнения (45) находим Крм:
 (52)
(52)
Регулятор момента представляется в виде П – регулятора .
Предельное значение коэффициента усиления обратной связи, обеспечивающее регулирования момента с нулевой ошибкой:
 (53)
(53)
Для расчета контура скорости представим контур момента в виде звена:

 (54)
(54)
Обозначив  , получим передаточную функцию оптимизированного контура регулирования момента:
, получим передаточную функцию оптимизированного контура регулирования момента:
 (55)
(55)
где 
Структурная схема контура регулирования скорости представлена на рисунке 13
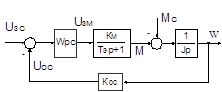
Рисунок 13 – Структурная схема контура регулирования скорости
Коэффициент передачи датчика отрицательной обратной связи по скорости рассчитывается как отношение максимальной скорости на соответствующее напряжение задания:
 (56)
(56)
Малой некомпенсируемой постоянной времени контура регулирования скорости является электромагнитная постоянная двигателя, т.е. принимаем  .
.
Большой компенсируемой постоянной времени контура регулирования скорости является механическая постоянная двигателя.
Для получения нулевой ошибки в статике и форсировки переходных процессов в динамике регулятор скорости должен быть ПИ – регулятор.
Настроим регулятор скорости на симметричный оптимум.
Желаемая передаточная функция контура скорости настроенного на симметричный оптимум:
 .(57)
.(57)
Передаточная функция объекта регулирования:
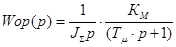 (58)
(58)
Разделив желаемую передаточную функцию контура скорости, на передаточную функция объекта регулирования получим передаточную функцию регулятора скорости:
 (59)
(59)
где  ,
,
 ;(60)
;(60)
 ;
;
 .
.
Для того чтобы убрать перерегулирование, по заданию необходимо на входе контура скорости поставить фильтр с постоянной времени  и следующей передаточной функцией:
и следующей передаточной функцией:
 (61)
(61)
Расчет переходных процессов производятся в пакете Matlab.
В модели будем использовать одномассовую консервативную расчетную схему привода.
Модель привода представлена на рисунке 14.
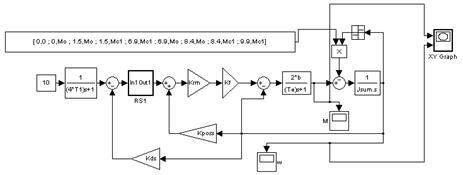
Рисунок 14 – Модель привода
Графики переходных процессов – момента электромагнитного двигателя и скорости первой массы, приведенные к валу двигателя - представлены на рисунках 15, 16.
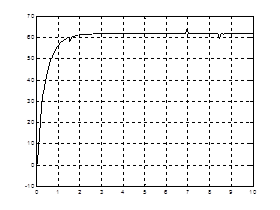
Рисунок 15 – График переходного процесса скорости первой массы
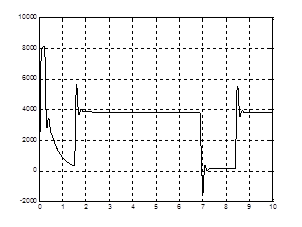
Рисунок 16 – График переходного процесса электромагнитного момента
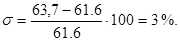
В результате моделирования получили, что перерегулирование скорости составляет:
|
из
5.00
|
Обсуждение в статье: Расчет переходных процессов в электроприводе за цикл работы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы