 |
Главная |


Разработка алгоритма управления и расчёт параметров элементов структурной схемы
|
из
5.00
|
В качестве системы управления выбираем систему подчинённого регулирования координат с тремя контурами: контур тока, контур скорости первой массы, контур с гибкой обратной связью по скорости второй массы.
Так как из расчётов приведенных ранее видно что:
Тэ и Тм отличаются не очень значительно, то придётся использовать внутреннюю обратную связь по ЭДС двигателя.
Контур тока.
Контур тока будем настраивать на симметричный оптимум. В качестве малой не скомпенсированной постоянной времени принимаем постоянную времени двигателя тиристорного преобразователя.
Т  = Тп = 0.002 с.
= Тп = 0.002 с.
Исходя из того что по условию задания на курсовой проект в качестве преобразователя используется ТП, то примем постоянную времени Тп=0,002с, что соизмеримо с Тэ, тогда ТП представляем инерционным звеном с передаточной функцией

Структурная схема контура тока представлена на рис 1.
 Uзт I
Uзт I
Рис 1.
Коэффициент обратной связи по току:
Кот = Uзт мах / Iмах = 0.1
Коэффициент усиления преобразователя
Кп = Uп / Uзт = 70/10 = 7
При настройке на технический оптимум желаемая передаточная функция разомкнутого контура равна:
 ;
;
где  = 2
= 2
Передаточная функция разомкнутого контура

Передаточная функция регулятора тока

Получили ПИ - регулятор тока.
Постоянная времени полученного регулятора тока Трт = 7.1 мс
Передаточная функция замкнутого контура тока

Контур скорости
Имея ввиду то что Ту = 0.0158 с, а 4Т  = 4*0.002 = 0.008 с
= 4*0.002 = 0.008 с
Можно сказать что Ту>>4Т 
Следовательно при расчёте контура скорости можно пренебречь влиянием обратной связи по упругому моменту. Структурная схема контура скорости имеет вид: (рис 2).
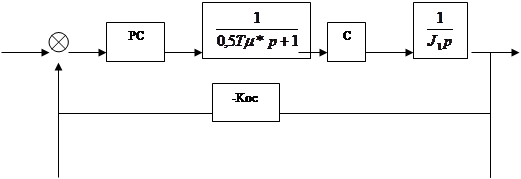 |
Рис 2.
Коэффициент обратной связи по скорости:
Кос =  =
=  0.159
0.159
Для стабилизации скорости применим ПИ-регулятор, который устранит статическую ошибку. Тогда желаемая передаточная функция разомкнутого контура скорости первой массы:

Передаточная функция разомкнутого контура скорости:

Тогда передаточная функция регулятора скорости первой массы будет:

Получили ПИ - регулятор скорости
Контур скорости второй массы
Для того чтобы уменьшить влияние упругой связи двух массовой системы на работу электропривода и демпфирования упругих колебаний введём гибкую обратную связь по скорости (ускорению) второй массы. Таким образом на регулятор скорости будет подаваться не только задание на скорость и сигнал обратной связи по скорости первой массы, но и сигнал гибкой обратной связи по скорости второй массы. Действие этой гибкой связи можно расценивать как искусственное увеличение  .
.
Структурная схема контура представлена на рис 3:
|

|

|

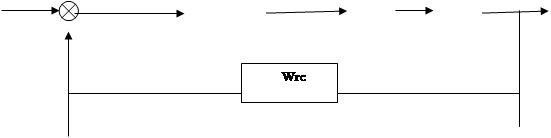
Рис 3
Передаточная функция гибкой обратной связи
Wгс = - То*Р
Для нормальной работы системы необходимо привести сигнал гибкой ОС к сигналу задания на скорость. Для этого в цепь гибкой ОС необходимо ввести коэффициент ОС по скорости первой массы.
Wгс = - То*Р*Кос
Для определения То надо задаться величиной о и подставить её в формулу:

Примем j = 5.8 Получим To = 0,235 Результаты моделирования.

Рис.4. Момент сопротивления

Рис.5. Скорость второй массы без гибкой обратной гибкой ОС.

Рис.6. Напряжение с ТП и сигнал управления.

Рис.7. Зависимость тока от времени.
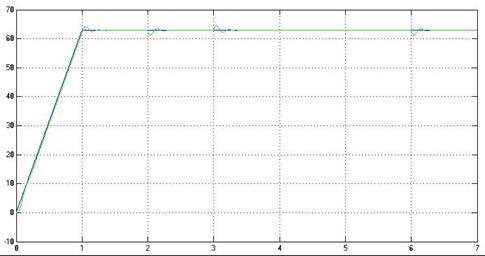
Рис.8. Скорость второй массы с гибкой ОС, задание 10в

Рис.9. Скорость второй массы с гибкой ОС, задание 10в (увеличено)
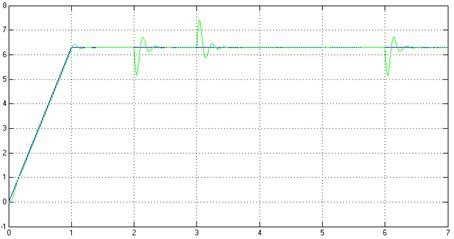
Рис.10. Скорость второй массы с гибкой ОС, задание 1в

Рис.11. Скорость второй массы с гибкой ОС, задание 1в (увеличено)
|
из
5.00
|
Обсуждение в статье: Разработка алгоритма управления и расчёт параметров элементов структурной схемы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы