 |
Главная |


Процесс выполнения команды в МПК К580
|
из
5.00
|
Организация магистралей микро ЭВМ.
Обмен информацией между МП БИС и ВУ организуется с помощью трех
магистралей микроЭВМ: МА, МД и МУ. Ввиду малой нагрузочной
способности, а также ограниченного числа выводов МП БИС в микроЭВМ необходимо использовать дополнительные схемы для организации этих магистралей.
Магистраль адресов является однонаправленной магистралью,
выдача адресов на которую осуществляется лишь МП БИС или
схемой прямого доступа к памяти при работе микроЭВМ с каналом прямого доступа к памяти. Малая нагрузочная способность МА требует применения буфера.
По МД организуется двунаправленный обмен данными между
МП БИС и памятью или ВУ. Максимальная нагрузочная способность МД невелика, что не позволяет непосредственно подключать к ней системы с большой емкостью памяти и широким набором периферийных устройств.
Для увеличения нагрузочной способности МД микроЭВМ необходимо также применять буфер МД.
Магистраль управления состоит из пяти шин, сигналы на которых формируются из записанного слова состояния МП БИС и его
выходных сигналов ПРИЕМ и Зп. На рис. 2.2.1 приведены организации МУ на схеме КР580ВН28.
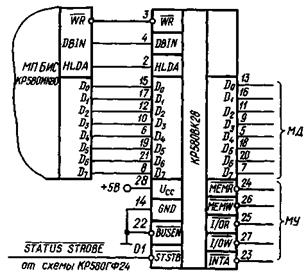
Рисунок 2.2.1 – Схема формирования МУ микроЭВМ
Команды МП БИС КР580ИК80.
Восьмиразрядное машинное слово используется для сообщения МП БИС как кода команд, так и данных. Набор команд фиксирован и состоит из 246
различных команд.
Все команды можно разделить на пять
групп:
1. Команды переноса данных, осуществляющие перенос
данных между регистрами или между регистрами и памятью.
2. Арифметические команды, включающие в себя команды сложения, вычитания, увеличения или уменьшения на единицу данных в регистрах или памяти.
3. Логические команды, позволяющие осуществить
логические операции И, ИЛИ, исключающие ИЛИ, сравнение,
сдвиг или взятие дополнения числа в регистрах или памяти
4. Команды передачи управления, обеспечивающие безусловную или передачу управления по условию, а также вызов или возврат из
подпрограмм.
5. Команды управления и работы со стеком, организующие ввод-вывод данных из микроЭВМ, доступ к стеку и внутреннему регистру признаков МП БИС, а также ее управление.
Память микроЭВМ организована в виде 8-разрядных ячеек, каждая из которых имеет свой 16-разрядный адрес. Таким образом,
МП БИС может работать с памятью емкостью до 65 536 байт. Одна команда может содержать от 1 до 3 байт.
Многобайтовые команды записываются в последовательные ячейки памяти. Первый байт команды всегда содержит код команды. При трехбайтовых командах
во втором и третьем байтах содержатся данные (адрес), причем во
втором байте записывается младший байт данных, а в третьем —
старший байт данных (адреса).
МП БИС имеет четыре различных типа адресации к памяти
или регистрам:
1. Прямая адресация — второй и третий байты команды содержат указание адреса памяти (младший байт адреса во втором байте команды, а старший байт — в третьем).
2. Адресация к регистру — команда указывает на регистр или пару регистров, в которых записаны данные.
3. Косвенная адресация с помощью регистров — команда указывает на пару регистров, в которых записан адрес памяти или данные.
4. Непосредственная — команда сама содержит данные. При двухбайтовых данных во втором байте команды записывается младший байт, а в третьем — старший.
За исключением обслуживания прерываний и выполнения команд передачи управления, МП БИС осуществляет выполнение программы, считывая команды последовательно из ячеек памяти.
В командах передачи управления адрес, к которому будет обращаться МП БИС, может указываться с помощью прямой или косвенной адресации. При выполнении команд передачи управления
по условию МП БИС проверяет наличие условия и в случае его подтверждения осуществляет передачу управления. При неудовлетворении условия выполнение программы будет продолжаться с команды, записанной в ячейке памяти, следующей после команды передачи управления по условию.
При обслуживании прерывания в зависимости от кода команды RST<N> МП БИС обращается к одной из восьми фиксированных ячеек памяти.
Тема 2.3
Интерфейсные интегральные схемы МПК К580
Организация обмена данными с микроЭВМ
В параллельном коде.
Асинхронный процесс обмена данными между микроЭВМ и
ВУ, а также требования наиболее рационального распределения
времени работы микроЭВМ приводят к необходимости разработки
интерфейсных устройств при организации обмена данными.
Задача таких устройств состоит в приеме данных по сигналам управления,
формирования сигналов, указывающих на наличие данных в устройстве, выдаче данных по сигналам управления, а также формировании сигналов, указывающих на готовность устройства к приему новых данных. Процесс обмена информацией организуется интерфейсным устройством под действием сигналов управления, поступающих от микроЭВМ и ВУ.
Технология БИС позволяет создавать универсальные многофункциональные интерфейсные устройства ввода-вывода параллельной информации. Такие устройства могут быть программируемыми и применяться для двунаправленной передачи данных и сигналов управления.
МикроЭВМ информируется о готовности устройства
к обмену данными, как правило, по сигналам прерывания. Обмен
данными осуществляется путем обращения микроЭВМ к устройству
ввода-вывода как к адресу памяти или ВУ.
Таким образом, интерфейсные устройства ввода-вывода параллельной информации позволяют согласовать во времени процесс обмена данными между микроЭВМ и ВУ при рациональном использовании времени работы микроЭВМ.
Программируемое устройство ввода-вывода
параллельной информации различного формата (КР580ВВ55).
Микросхема КР580ВВ55 представляет собой
программируемое устройство, используемое для ввода-вывода параллельной информации.
Схема позволяет осуществлять обмен 8-
разрядными данными по трем каналам: А, В, С.
Направление обмена и режим работы для каждого канала задается программно. Каналы служат для передачи как данных, так и управляющих сигналов.
Упрощенно схема состоит из регистра управления и трех регистров, предназначенных для ввода-вывода данных.
Структура микросхемы КР580ВВ55 приведена на рис. 2.3.1, а, а ее
условное обозначение — на рис. 2.3.2, б.
Назначение выводов: Д0 —Д7 — двунаправленная магистраль данных для передачи данных, управляющих слов и информации состояния;
КА0—КА7 — двунаправленная магистраль данных каналов А;
КВ0—КВ7 — двунаправленная магистраль данных канала В;
КС0—КС7 — двунаправленная магистраль данных канала С (магистрали каналов передачи данных, управляющих сигналов и сигналов запроса на прерывание от ВУ и МП БИС);
ВУ — выбор устройства;
А0—А1 — входы, необходимые для выбора одного из каналов А, В, С или регистра управления;
Чт (чтение) — вход, на который подается сигнал на выдачу данных из внутренних регистров схемы на МД;
R— вход, используемый для начальной установки схемы.
При подаче сигнала на этот вход содержание всех внутренних регистров устанавливается на ноль;
Зп (запись) — вход записи данных в схему.
Для микроЭВМ схему можно представить состоящей либо из
четырех ВУ, либо из четырех адресов памяти.
Для формирования сигнала выборки устройства, подаваемого на вход ВУ(инверсный), можно использовать шины А2—А15 MA микроЭВМ.
При обращении к схеме как к четырем ВУ входы Чт и Зп должны быть подключены к шинам Чт.ВВ и ЗпВВ МУ микроЭВМ.
При обращении к схеме как к четырем адресам памяти ее входы Чт и Зп должны быть соответственно подключены к шинам Чт. ПАМЯТЬ и Зп. ПАМЯТЬ МУ микроЭВМ.
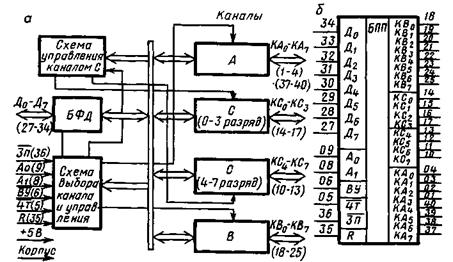
Рисунок 2.3.1 – Упрощенная схема программируемого параллельного интерфейса КР580ВВ55 (а) и его условное обозначение (б)
Схема может выполнять следующие функции: буферизацию (при
асинхронном режиме обмена данными); преобразование формата
данных; сопряжение микроЭВМ с ВУ в режиме прерывания.
Режимы работы микросхемы К580ВВ55 задаются при ее начальной установке. Четыре подадресных регистра схемы включают в
себя три регистра каналов ввода-вывода данных (А, В, С) и регистр
управления.
Регистр канала С может быть подразделен на два
четырехразрядных регистра ввода-вывода данных, к которым осуществляется доступ как к отдельным независимым регистрам (рис.
2.3.1, а). Имеется возможность подразделения трех каналов на две
группы (рис. 2.3.2, б). В этих группах каналы А к В используются
для обмена данными с микроЭВМ, а отдельные шины канала С—
для записи управляющих сигналов.
Режимы работы каналов задаются путем записи управляющего
слова в регистр управления. Существует три типа работы схемы.
Тип 0 — это простой ввод-вывод данных по трем 8-разрядным каналам, причем канал С может быть подразделен на два 4-разрядных канала. Каждый из каналов может быть использован отдельно для ввода или вывода информации.
При работе схемы в этом режиме никаких дополнительных сигналов управления не требуется.
Вид каналов приведен на рис. 2.3.2, а.
Тип 1 - Позволяет осуществлять обмен данными по каналам А и В с помощью сигналов управления, передаваемых по каналу С.
Для каналов А и В существует четыре комбинации взаимных направлений передачи данных:
а) каналы А н В работают в режиме вывода данных;
б) каналы А и В работают в режиме ввода данных;
в) канал А работает в режиме ввода, а В — в режиме вывода данных;
г) канал А работает в режиме вывода, а В — в режиме ввода данных.
Незадействованные для управляющих сигналов шины канала С могут быть использованы для ввода-вывода информации. Направление передачи информации по этим шинам определяется управляющим словом, записанным в регистре управления.
Управляющие сигналы, передаваемые по шинам канала С при работе каналов А и В в режиме ввода данных:
По сигналу СТБ (СТРОБ) информация записывается во входной буфер данных схемы. Выходной сигнал ВВБФ («Ввод в буфер») устанавливается в «1» и поддерживается на протяжении всего интервала времени от записи данных до момента их чтения микроЭВМ.
Сигналы СТБ и ВВБФ не могут быть использованы для информации МП БИС о готовности данных по вводу, так как ввод можно осуществлять лишь после окончания сигнала СТРОБ.
Для информирования МП БИС о готовности данных по вводу
используется выходной сигнал 3. Пр (запрос прерывания), появляющийся на КС0, КС3 в зависимости от выбранного канала.
Разрешение на выдачу сигнала 3. Пр выдает внутренний триггер разрешения прерывания схемы (Р. Пр). Состояние триггера устанавливается лишь программно и не поступает на внешние зажимы схемы.
Незадействованные под управляющие сигналы шины КС6, КС7 могут быть использованы для ввода-вывода данных в зависимости от управляющего слова.
Управляющие сигналы, передаваемые по шинам канала С при
работе каналов А к В в режиме вывода данных:
Данные в схему записываются с помощью импульса записи, подаваемого на вход ЗП.
В момент окончания записи данных формируется выходной управляющий сигнал ВБФ (ввод в буфер), указывающий, что данные записаны во входной буфер данных и готовы для выдачи в ВУ.
Данные в ВУ выводятся по сигналу ПРИЕМ, выдаваемому с ВУ. Сигнал на выходе З.Пр («Запрос прерывания») используется для информирования микроЭВМ о готовности канала по выводу новых данных.
На интервале вывода данных во ВУ сигнал 3. Пр. установлен в «0» и будет переведен в «1» при наличии «1» у сигналов ПРИЕМ, ВБФ и триггера разрешения прерывания (Р. Пр.).
Так же как и в случае ввода данных, управление состоянием триггера осуществляется путем записи «0» или «1» в соответствующий разряд регистра канала С. Это дает возможность программно управлять режимом вывода данных из микроЭВМ.
Незадействованные под управляющие сигналы КС4—KC5 могут быть использованы для ввода-вывода информации.
Доступ к ним осуществляется с помощью операции чтения данных из регистра канала С или использования управляющего слова для изменения содержания отдельных разрядов регистра канала С.
Сигналы ВВБФ, ВБФ и 3 Пр канала С не могут быть изменены произвольно программно при установке отдельных его разрядов или при начальной установке схемы, так как они отражают состояние внутренних триггеров на разрешение прерываний схемы
Тип 2 - При работе по этому типу канал А используется для двунаправленной передачи данных, канал С — для записи управляющих сигналов, обеспечивающих передачу данных по каналу А. Управляющие сигналы являются комбинацией сигналов, необходимых при работе канала А по типу 1.
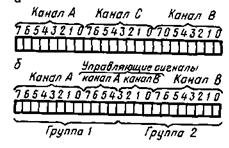
Рисунок 2.3.2 – Использование регистров канала А, В, С для передачи информации по режиму 0 (а) и по режиму 1 (б)
Шины КС2, КС0 могут быть задействованы для ввода-вывода или передачи управляющего сигнала.
Комбинации режимов задаются путем записи управляющего слова по адресу регистра управления схемы.
В регистр управления можно только записывать управляющие слова. Чтение информации из регистра управления недопустимо.
Так как схема КР580ВВ55 не имеет внутреннего регистра, указывающего на состояние схемы, то для его определения считывают содержание регистра канала С и интерпретируют отдельные его разряды.
При работе схемы по типу 1 или 2 можно изменять содержание отдельных разрядов канала С с помощью управляющего слова, записываемого в регистр управления.
При подаче уровня «1» на вход R обнуляются регистр управления, триггеры разрешения прерываний, а все каналы устанавливаются в режим ввода данных.
|
из
5.00
|
Обсуждение в статье: Процесс выполнения команды в МПК К580 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы