 |
Главная |


Кинематический анализ работы плоского механизма.
|
из
5.00
|
Траектория движения материальной точки.
Цель работы: приобретение теоретических знаний о способах задания движения материальной точки. Усвоение практических навыков вычисления параметров движения и построение траекторий движения материальной точки.
Задача К1: материальная точка движется в плоскости  . Закон движения задан уравнениями:
. Закон движения задан уравнениями:  , где
, где  и
и  выражены в сантиметрах,
выражены в сантиметрах,  - в секундах (табл. К1.1, К1.2). Найти:
- в секундах (табл. К1.1, К1.2). Найти:
1. Уравнение траектории движения точки;
2. Построить данную траекторию на чертеже;
3. Определить скорость, ускорение точки в момент времени  .
.
Указания: задача К1 относится к кинематике точки и решается с помощью формул, по которым определяется скорость и ускорение точки при координатном и естественном способах задания движения. В данной задаче искомые величины нужно определить для момента времени  . при определении траектории движения точки следует использовать тригонометрическую формулу
. при определении траектории движения точки следует использовать тригонометрическую формулу 
Таблица К1.1 Таблица К1.2
| (предпоследняя цифра зачетной книжки) | (последняя цифра зачетной книжки) | |||||
| №пп |
| №пп | 
| |||
| 0 |
|
| 0 | 
| ||
| 1 |
|
| 1 | 
| ||
| 2 |
|
| 2 | 
| ||
| 3 |
|
| 3 | 
| ||
| 4 |
|
| 4 | 
| ||
| 5 |
|
| 5 | 
| ||
| 6 |
|
| 6 | 
| ||
| 7 |
|
| 7 | 
| ||
| 8 |
|
| 8 | 
| ||
| 9 |
|
| 9 | 
| ||










Пример К1: даны уравнения движения точки в плоскости : 
 – в сантиметрах, – в секундах. Найти:
– в сантиметрах, – в секундах. Найти:
1. Уравнение траектории точки;
2. Построить данную траекторию на чертеже;
3. Определить скорость, ускорение точки в момент времени  .
.
Решение:
1. Для определения уравнения траектории точки исключим из данных уравнений движения время

Уравнение траектории точки представляет собой уравнение эллипса с центром в т. С(2;1) и полуосями 1 и 2.
Найдем положение точки в момент времени .


 2. Скорость точки найдем по ее проекциям на координатные оси:
2. Скорость точки найдем по ее проекциям на координатные оси:
|

|
M1
C
O x
Рис. К1
 ;
; 

Построим вектор  на рисунке К1 в т. М1.
на рисунке К1 в т. М1.
3.Ускорение точки найдем по формулам


s w:val="24"/></w:rPr><m:t>2</m:t></m:r></m:sup></m:sSup></m:den></m:f><m:r><w:rPr><w:rFonts w:ascii="Cambria Math" w:fareast="Times New Roman" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/><w:i/><w:sz w:val="24"/><w:sz-cs w:val="24"/></w:rPr><m:t> </m:t></m:r></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>"> 

-8-
Ответ: 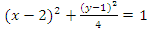 ;
;  ;
;
 .
.
Лабораторная работа №2.
Кинематический анализ работы плоского механизма.
Цель работы: знакомство с работой простейших плоских механизмов. Использование в практических расчетах основной теоремы кинематики, центра мгновенных скоростей. Изучение работы отдельных звеньев: кривошипа, ползуна, шатуна.
Задача К2: плоский механизм состоит из стержней 1-4 и ползуна  , соединенных друг с другом и с неподвижными опорами
, соединенных друг с другом и с неподвижными опорами  и
и  шарнирами (рис. К2.0 – К2.9). Длины стержней:
шарнирами (рис. К2.0 – К2.9). Длины стержней:  . Положение механизма определяется углами
. Положение механизма определяется углами  , которые вместе с другими величинами заданы в таблице К2. Точка
, которые вместе с другими величинами заданы в таблице К2. Точка  на всех рисунках и точка
на всех рисунках и точка  на рис. 7-9 в середине соответствующего стержня. Определить величины, указанные в таблице в столбце «найти».
на рис. 7-9 в середине соответствующего стержня. Определить величины, указанные в таблице в столбце «найти».
Дуговые стрелки на рисунках показывают углы, т. е. по ходу или против хода часовой стрелки (например, угол  на рис. 1 следует отложить от стержня
на рис. 1 следует отложить от стержня  против хода часовой стрелки, а на рис. 2 – от стержня
против хода часовой стрелки, а на рис. 2 – от стержня  по ходу часовой стрелки).
по ходу часовой стрелки).
Построение чертежа начинать со стержня, направление которого определяется углом  ; ползун
; ползун  и его направляющие для большей наглядности изобразить, как в
и его направляющие для большей наглядности изобразить, как в
примере К2 (см. рис. К2). Заданную угловую скорость считать направленной против хода часовой стрелки, а заданную скорость  – от точки к
– от точки к  .
.
Указания: задача К2 – на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.
Предпоследняя цифра зачетной книжки

2 3 1 D В b Рис. К2.0 | 2 E
A 3 
 4 4
 D D  O1 1 B
O1 1 B
 O2
Рис. К2.1 O2
Рис. К2.1
| ||
О2 4
А 2 D
2 E
 O1 3
B
b
Рис. К2.2
O1 3
B
b
Рис. К2.2
| b 2
E
D B 4
3
O2
3 O1
Рис. К2.3
| ||
| 1 А 3
D B b
O1
2
E
O2
4
Рис. К2.4
| O2 4
E
3 2
B D
O1
A
B 1
Рис. К2.5
| ||
| O2
A 3 E
1 4
O1 D
2
B
b
Рис. К2.6
|
O1
2 K
A 3
D
4
B
O2 E
Рис. К2.7
| ||
| 4 E 3
K D
O2 b
2
B
4 O1
Рис. К2.8
| 5 E
b 4 O1
B D K 1
A
O2
Рис. К2.9
|
 Е
Е 4
4
 O2
O2
Таблица К2
Последняя цифра зачетной книжки
Номер условия
Углы
Дано
Найти





 ,
, 
 ,
,
 ,
, 







 .
.  .
. . Точка Е принадлежит стержню АЕ. Чтобы найти
. Точка Е принадлежит стержню АЕ. Чтобы найти  :
:  ,
,  .
. . Теперь, зная
. Теперь, зная  , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня АЕ) на прямую, соединяющую эти точки (прямая АЕ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор
, воспользуемся теоремой о проекциях скоростей двух точек тела (стержня АЕ) на прямую, соединяющую эти точки (прямая АЕ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор  .
. . Точка В принадлежит стержню ВD. Следовательно, по аналогии с предыдущим, чтобы определить
. Точка В принадлежит стержню ВD. Следовательно, по аналогии с предыдущим, чтобы определить  перпендикулярны стержни 1 и 4). По направлению вектора
перпендикулярны стержни 1 и 4). По направлению вектора  будет перпендикулярен отрезку С2D, соединяющему точки D и С2, и направлен в сторону поворота. Величину VD найдем из пропорции
будет перпендикулярен отрезку С2D, соединяющему точки D и С2, и направлен в сторону поворота. Величину VD найдем из пропорции  .
. и
и  , заметим, что
, заметим, что  АС2Е – прямоугольный, т. к.острые углы в нем равны 30 и 60°, и что
АС2Е – прямоугольный, т. к.острые углы в нем равны 30 и 60°, и что  . Тогда
. Тогда  .
. C3DB=30°, а
C3DB=30°, а  3
3 
 3
3  . Составив пропорцию, найдем, что
. Составив пропорцию, найдем, что .
. .
. ,
,  ,
,  .
.