 |
Главная |


Передаточные функции по управлению и по возмущению
|
из
5.00
|
До сих пор рассматривались системы с одним входом и одним выходом, т.е. простейший вид одномерных систем. Даже в рамках одномерных систем входных процессов может быть несколько. В классической теории управления нередко рассматриваются системы с двумя входными воздействиями: управляющим и возмущающим, полезным сигналом и помехой.
Аппарат передаточных функций и в этом случае оказывается полезным. Для примера рассмотрим случай системы с обратной связью, в которой наряду с управляющим воздействием имеется возмущающее.
Приведем ее структурную схему и соответствующую систему дифференциальных уравнений. В теории автоматического управления, как правило, отдается предпочтение первой из этих двух эквивалентных форм описания систем. Точнее, основную часть информации о замкнутой системе приводят в виде структурной схемы, а недостающую – в виде дифференциальных уравнений или передаточных функций.
Итак, пусть структурная схема системы такая, как она изображена на рисунке 4.
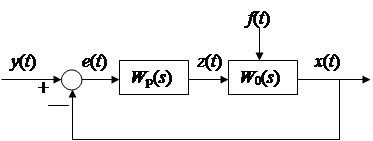
Рисунок 4 – Структурная схема системы с двумя воздействиями
Эта же система пусть описывается системой уравнений:
уравнением сравнивающего звена
 ;
;
уравнением регулятора
 , (
, (  );
);
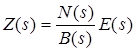
уравнением объекта регулирования
 , (
, (  ).
).
Здесь p – символ дифференцирования, B , N , D , M , C – полиномы от p. Другими словами, два последних уравнения являются, в действительности дифференциальными уравнения, только записанными в символьной форме. При нулевых начальных условиях применим преобразования Лапласа к каждой части уравнения этой системы уравнений. Тем самым будут получены те же самые уравнения в изображениях:
уравнение сравнивающего звена
 ;
;
уравнения регулятора
 ,
,  ;
;
уравнения объекта
 ,
,  ;
;
и выражения соответствующих передаточных функций, с использованием которых можно наиболее наглядным образом представить взаимосвязь между входом и выходом в каждом звене:
передаточную функцию регулятора  :
:
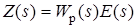 ,
,  ;
;
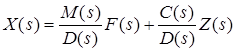
передаточную функцию объекта по управлению  и по возмущению
и по возмущению  :
:
 ,
,
 ,
,  .
.
Проще всего дать определение этих передаточных функций в виде отношения полиномов, коэффициенты которых определяются соответствующими коэффициентами дифференциальных уравнений, как это только что проделано. Однако полезней всего определить их как отношение изображений по Лапласу соответствующих координат не только при нулевых начальных условиях, но и при равенстве нулю всех остальных координат, которые в рассматриваемой ситуации не рассматривается как входная координата.
Например, передаточной функцией объекта по управлению является отношение изображений выходной координаты объекта к изображению входной координаты объекта при нулевых начальных условиях на упомянутые координаты и равенстве нулю возмущающего воздействия f(t).
Исключая переменные  и
и  из системы уравнений связывающей значения всех переменных (в изображениях), получим уравнение связи
из системы уравнений связывающей значения всех переменных (в изображениях), получим уравнение связи

Определим теперь выражение изображения выходной координаты замкнутой системы через изображения входных координат (управляющего и возмущающего воздействий)
 .
.
Отсюда видно, что передаточная функция замкнутой системы по управлению имеет в точности такой же вид, как если бы возмущение, вообще, отсутствовало
 ,
,
а передаточная функция замкнутой системы по возмущению имеет вид:
 .
.
Ее можно определить точно так же, как и ранее упомянутую, если предположить отсутствие управляющего воздействия.
Вообще, в классической теории управления все координаты равноправны. Хотя считается, что в данной теории рассматриваются системы с одной входной и одной выходной координатой, имеется некоторый выбор среди небольшого числа координат, какую из них считать входной, а какую – выходной. По умолчанию предполагается, что входной координатой является управляющее воздействие, а выходной – регулируемая или управляемая координата. Всякое отклонение от этого варианта уточняется. Например, говоря о передаточной функции по ошибке, подразумевается, что входной координатой считается управляющее воздействие, а выходной – координата ошибки. Аналогично, говоря о передаточной функции по возмущению, имеют в виду, что входной координатой является возмущение, а выходной – управляемая координата.
|
из
5.00
|
Обсуждение в статье: Передаточные функции по управлению и по возмущению |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы