 |
Главная |


Статические и астатические системы
|
из
5.00
|
Свойство астатизма является одним из важнейших свойств систем управления. По передаточной функции системы очень просто судить о наличии у нее этого свойства. И все же это свойство системы, а не передаточной функции. Поэтому и начнем рассуждения с качественной стороны дела.
Свойство астатизма может быть по отношению к управляющему или возмущающему воздействию. По умолчанию подразумевается первый случай.
Система называется астатической, если при стремлении управляющего воздействия к постоянной величине, отличной от нуля, сигнал ошибки стремится к нулю.
Уточнение того, что постоянная величина, к которой стремится управляющее воздействие, отлична от нуля, потребовалось только потому, что в противном случае сигнал ошибки стремится к нулю вне зависимости от того, астатическая система или нет.
Об астатизме системы легко судить по ее передаточной функции. Выясним условия, которым должна удовлетворять передаточная функция астатической системы.
По теореме о начальных и конечных значениях условие равенства нулю предельного значения сигнала ошибки имеет вид:
 .
.
Условие же неравенства нулю предельного значения входного процесса имеет вид:
 .
.
Последнее неравенство возможно в случае, когда изображение Y(s) можно представить в виде
 ,
,
таком что
 .
.
Подставим такое значение изображения по Лапласу входного воздействия в выражение предельного значения сигнала ошибки:

Так как второй сомножитель здесь не равен нулю, то условием равенства произведения в правой части последнего выражения является равенство нулю первого сомножителя.
Говорят, что функция  имеет нуль n-го порядка (
имеет нуль n-го порядка (  ) в начале координат, если она может быть представлена в виде
) в начале координат, если она может быть представлена в виде
 и
и  .
.
Таким образом, система астатическая тогда и только тогда, когда ее передаточная функция по ошибке имеет нуль какого-либо порядка в начале координат.
Суждение об астатизме замкнутой системы ведется обычно по виду передаточной функции разомкнутой системы. Под передаточной функцией разомкнутой системы понимается передаточная функция той последовательности операторов, которая начинается с выхода сравнивающего звена и кончается одним из входов в это звено.
Передаточная функция замкнутой системы по ошибке  достаточно просто выражается через передаточную функцию разомкнутой системы
достаточно просто выражается через передаточную функцию разомкнутой системы  :
:

 .
.
Не трудно доказать, что передаточная функция по ошибке имеет нуль n–го порядка в начале координат, когда передаточная функция разомкнутой системы имеет полюс того же порядка в начале координат.
Действительно, пусть это условие выполнено, т.е. возможно представление передаточной функции разомкнутой системы в виде
 , (
, (  ).
).
Тогда
 ,
,  .
.
Строго говоря, если передаточная функция по ошибке имеет нуль n–го порядка в начале координат, то можно говорить об астатизме того же порядка системы управления. Астатизм выше первого порядка редко встречается и его трудно организовать, поэтому, говоря об астатизме, имеют в виду, как правило, именно астатизм первого порядка.
Все ранее сказанное об астатизме имело отношение к астатизму по управляющему воздействию. Если в качестве входного воздействия рассматривать возмущающее воздействие, то приведенные выше определения будут относиться к астатизму по возмущения, а не по управлению.
Пример. Простейшим примером воздействия, стремящегося к постоянному, не равному нулю значению, является, так называемое единичное ступенчатое воздействие. В дальнейшем оно будет рассмотрено достаточно подробно, а пока только скажем, что оно равно единице при положительных значениях моментов времени и нулю при отрицательных. Преобразование Лапласа такой функции равно 1/s.
На рисунке 5 показана кривой 1 показана реакция астатической системы, а кривой 2 – реакция статической системы на единичное ступенчатое воздействие. Самым существенным здесь является то, что в первом случае величина установившейся ошибки e равна нулю, а во втором – некоторой постоянной величине.
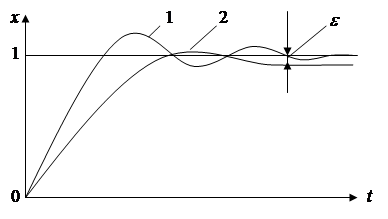
Рисунок 5 – Статические и астатические системы
Различие между статическими и астатическими системами принципиально с теоретической точки зрения, хотя с практической это не совсем так. Действительно, если значение передаточной функций по ошибке в начале координат пренебрежимо мало, то следует ожидать столь же малым значение установившейся ошибки.
ЛИТЕРАТУРА
1. Мирошник И.В. Теория автоматического управления. Линейные системы. - СПб.: Питер, 2005.
2. Филлипс Ч., Харбор Р. Системы управления с обратной связью. М.: Лаборатория Базовых Знаний, 2001.
3. Методы классической и современной теории автоматического управления в 3-х т. Т.1: Анализ и статистическая динамика систем автоматического управления / Под ред. Н.Д. Егупова. – Изд. МГТУ им. Н.Э. Баумана, 2000.
4. Медведев В.С., Потемкин В.Г. Control System Toolbox. MATLAB 5 для студентов/ Под общ. ред. В.Г. Потемкина. - М.: ДИАЛОГ-МИФИ, 1999.
|
из
5.00
|
Обсуждение в статье: Статические и астатические системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы