 |
Главная |


Практическое задание №3
|
из
5.00
|
Тема : «Кинематическая настройка технологического оборудования»
Цель работы:
- изучение структуры и связей кинематических групп технологического оборудования;
- приобретение практических навыков настройки кинематических цепей.
План работы:
1.Изучить строение и назначение элементов в кинематических группах и их связи.
2.Изучить правила настройки кинематических групп.
3.Рассчитать настройку кинематической цепи .
Теоретическая часть
Кинематические группы и связи в технологическом оборудовании. Любое исполнительное движение в технологическом оборудовании создается и реализуется с помощью кинематической группы.
Кинематическая группа включает:
- один или несколько источников движения (ИД).
- пространственно-временные связи между ними.
Источники движения машин Технологические машины пищевых производств, независимо от отраслевого назначения, для создания необходимых перемещений исполнительных органов имеют один или несколько источников движения.
В качестве источников движения могут использоваться:
- асинхронные двигатели переменного тока
- электродвигатели постоянного тока,
- асинхронные двигатели переменного тока с преобразователями частоты,
- гидропневмодвигатели,
- шаговые электродвигатели,
- источники движения в виде пружин и других аккумуляторов энергии.
Источники движения по признаку регулируемости делятся на нерегулируемые и регулируемые (по скорости, по направлению, по скорости и направлению)
При нерегулируемом источнике движения кинематическая группа содержит механические устройства для настройки параметров движения (органы настройки). Наименование кинематической группы аналогично наименованию регулируемого ею исполнительного органа движения.
Структура кинематической группы зависит от характера движения, числа исполнительных органов, вида источника движения, системы управления и потребности в регулировании.
Исполнительный орган – это подвижные конечные звенья кинематической группы, участвующие в образовании траектории исполнительного движения.
Рабочие исполнительные органы – это органы, осуществляющие абсолютное или относительное движение в процессе преобразования продукции.
Исполнительные органы в технологическом оборудовании совершают вращательные или поступательные движения, т.е. являются подвижными звеньями вращательной или поступательной кинематической пары, называемой исполнительной.
В зависимости от числа исполнительных органов кинематические группы делятся на простые и сложные. Простые имеют только один исполнительный орган, сложные два и более.
Под пространственно-кинематической связью понимается такая связь между двумя любыми ее звеньями, которая не позволяет им занимать в пространстве произвольные положения и иметь произвольные скорости.
Пространственно-кинематические связи в технологическом оборудовании осуществляются через технологические цепи и механические и немеханические каналы связи. Механические связи и цепи реализуются в машинах через механические звенья – передачи, устройства и механизмы, а немеханические – через гидропневмоавтоматику, электрические и электронные каналы связи.
Структурно пространственно-кинематические связи кинематической группы подразделяют на внутренние и внешние.
Внутренняя связь кинематической группы – это совокупность всех звеньев кинематических пар и устройств в группе, обеспечивающая условия получения движения с необходимой траекторией и требуемой точностью ее формы.
Внешняя связь кинематической группы – это совокупность всех звеньев кинематических пар, устройств и источника движения, обеспечивающая количественные характеристики движения (скорость, направление, путь).
Примеры структурных схем кинематических групп:
§ Сложная с двумя исполнительными органами
 1 B1
1 B1
3 i2 4
B2
a b 2
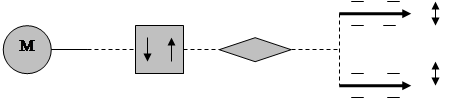
Рис.1. Блок-схема сложной кинематической группы
а – орган настройки на направление движения, b – орган настройки на траекторию и скорость движения, 3М-4 – внешняя связь
§ Простая группа
 |
1 i 2 B
Рис.2. Блок-схема простой кинематической группы
1(М)-2 – внешняя связь
§ Простая группа с регулируемым ИД
 |
В
Рис.3 Блок-схема простой группы с регулируемым ИД
Органы настройки, регулирующие скорость и направление, располагаются во внешней структурной связи кинематической группы – в цепи между источником движения и звеном внутренней связи группы.. Органы настройки, регулирующие форму траектории, располагаются во внутренней структурной связи группы.
Кинематические структуры оборудования. Кинематическая структура машины - это совокупность кинематических групп и их соединений. Группы между собой могут быть объединены разными способами в зависимости от общности их исполнительных органов и источников движения. Всякое соединение двух кинематических групп осуществляется через дополнительные устройства – суммирующие механизмы, муфты, реверсы и др.
Определяющей частью кинематической структуры любой машины является его формообразующая часть. Структуры машин можно разделить на три класса:
1.Класс простых структур (П) представляют машины с кинематической структурой, содержащей только простые группы, т.е. имеющие только один исполнительный орган , например Ф(В) или Ф (П) (с вращательным или поступательным движением) – машина для калибровки растительного сырья с транспортерным движителем, волчок для измельчения мясного сырья и др.
2.Класс сложных структур (С) представляет машины с кинематической структурой, содержащей сложные группы, т.е. группы имеющие по два и более исполнительных органов, например, создающие движения Ф (В1 В2) – тестомесильная машина с планетарным механизмом, Ф (В П) – ротационная формующая машина для производства тестовых заготовок для печенья с формующим барабаном и транспортером и др.
3.Класс комбинированных структур (К) представляет машины с кинематической структурой, содержащей одновременно простые и сложные группы, например, Ф (В) или Ф (П) и Ф (В П) или Ф (В1 В2) – тестомесильная машина с планетарным механизмом и нижним способом выгрузки теста с помощью транспортера и др.
Синтез и анализ кинематической структуры. При составлении и анализе кинематической структуры, являющейся основой для последующего проектирования технологической машины, необходимо четко представлять получаемый в зоне обработки продукт и ту поверхность исходного материала, на которую оказывается воздействие в данной машине. Это означает, что поверхность необходимо охарактеризовать определенными параметрами в продольном и поперечном сечениях.
Необходимо также представлять вид, конструкцию рабочего органа, непосредственно воздействующего на продукт, форму его рабочих граней, а также исходное и относительное взаимное положение обрабатываемого продукта и рабочего элемента при воздействии на продукт в ходе технологического процесса.
Анализ и синтез рабочего органа и его элементов, взаимодействующих с продуктом, а также форм линий позволяет установить количество, состав и характер движений для реализации в конструкции выбранного метода воздействия. После того как будут установлены и выбраны рациональные движения, собственно определяющие кинематику машины, приступают к составлению и анализу структур кинематических групп, который проводится последовательно от одной группы к другой в следующем порядке:
- устанавливают число исполнительных органов, которое, как правило, соответствует числу простых движений, образующих траекторию исполнительного движения;
- определяют характер и состав внутренних структурных связей группы;
- устанавливают источник движения и определяют характер и состав внешней структурной группы;
- устанавливают число и расположение необходимых органов настройки.
Принципы кинематической настройки технологического оборудования. Кинематическая настойка технологического оборудования является составной частью его наладки и проводится с целью подготовки оборудования для выполнения конкретных технологических операций. Собственно кинематическая настройка представляет собой установку скоростей рабочих органов и сводится к настройке кинематических цепей.
Кинематическим параметром любой кинематической цепи является ее передаточное отношение, определяемое как произведение передаточных отношений кинематических пар. Под передаточным отношением понимается отношение частоты вращения ведомого вала к частоте вращения ведущего вала  .
.
Требуемое передаточное отношение конкретного органа определяют по формуле настройки, которую получают из уравнения кинематического баланса, составляемого по кинематической схеме с учетом согласования конечных звеньев цепи по скоростям или перемещениям. Уравнение кинематического баланса представляет собой совокупность сомножителей передаточных отношений всех постоянных передач цепи согласования, включая передаточное отношение органа настройки.
Для вывода формулы настройки необходимо:
- составить условие кинематического согласования перемещений или скоростей конечных звеньев цепи в соответствии с ее функциональным назначением;
- составить уравнение кинематического баланса цепи согласования;
- решить уравнение относительно параметра, определяющего передаточное отношение органа настройки.
Задание
1. Провести анализ кинематической цепи (рис.5)
2. Составить уравнение кинематического баланса настраиваемой цепи и вывести формулу настойки цепи.
3. Провести числовой расчет цепи по заданным значениям чисел зубьев зубчатых колесваемым вариантам

Рис. 5. Схема кинематической цепи привода ползуна
1) Двигатель 1,1 кВт, 1000 об/мин; 2) z1 = 30; 3) z3 = 60; 4) z4 = 20; 5) z5 = 70; 6) z6 = 50; 7) z7 = 100; 8) zсм = 27; 31; 37 9) zсм = 54; 50; 44. 10) Шаг ходового винта tхв = 15 мм; 11) ползун
Решение:
Условие согласования перемещений конечных звеньев:
1 оборот барабана должен соответствовать Р мм продольного перемещения перемешивающего устройства.
Составление уравнения кинематического баланса
1 оборот барабана i1i2…iП …in tХ.В. = Р,
где i1.... in – передаточные отношения всех n постоянных передач цепи перемешивающего устройства, iП – передаточное отношение органа настройки перемешивающего устройства, tХ.В. – шаг передачи «ходовой винт-гайка».
Отсюда формула настройки iП = Р/( i1i2… in tХ.В) или iП = СП · Р.
Для скоростной цепи nM об/мин  nБ об/мин, где
nБ об/мин, где  означает «следует преобразовать»
означает «следует преобразовать»
Уравнение кинематического баланса
nM i1i2….iV… in = nБ
Отсюда формула настройки .
iV = nБ / nM i1i2… in или  .
.
(30/60)*(50/100)*(27/54)*15=1,9
(70/50)*(50/100)*(31/50)*15=6,5
(50/100)*(37/44)*15=6,3
Вывод: Изучила структуры и связи кинематических групп технологического оборудования, а также приобрела навыки в настройке кинематических цепей.
|
из
5.00
|
Обсуждение в статье: Практическое задание №3 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы