 |
Главная |


Лабораторная работа № 2
|
из
5.00
|
Тема: Исследование алгоритма попарных перестановок конструктивных
элементов между ТЭЗами. Компоновка итерационным алгоритмом.
Цель работы:
1. Ознакомление студента с методами автоматизированной компоновки на этапе конструкторского проектирования с помощью итерационного алгоритма.
2. Анализ преимущества автоматизации проектирования по сравнению с ручным способом.
3. Закрепление практических навыков на персональном компьютере (ПЭВМ) в диалоговом режиме.
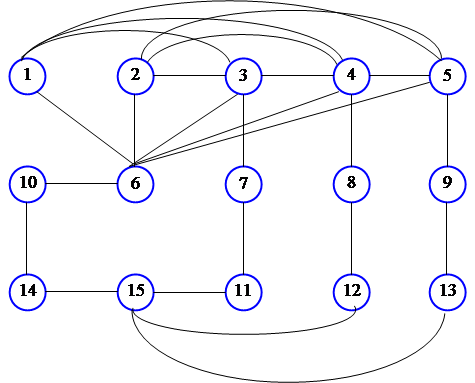
Мультиграф схемы
 |
Дано:
N = 15 (элементов)
P = 2 (плат)
n max = 8 (элементов)
Где:
N – число элементов схемы;
P – число плат, на которых нужно разместить схему;
n max – максимальное количество элементов, размещаемых на каждой плате.
Матрица связности мультиграфа
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| 1 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 4 | 1 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 5 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 6 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 7 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 8 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 9 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 10 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 11 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 13 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 |
| 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 |
| 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 |
Таб.2
Матрица связности мультиграфа (Рис.2)
Сравнительный анализ полученного разбиения с результатами ручного разбиения и с помощью последовательного алгоритма
Хотя итерационные алгоритмы в отличии от последовательных позволяют на каждом шаге получать локальный минимум, но обладают меньшим быстродействием,
в этой лабораторной работе этого не видно. Сказывается то, что при компановке данным методом первое приближение дало окончательный результат.
Среднее время выполнения компановки
итерационным методом: 0 ч. 9 мин. 30 сек.
При увеличении элементов на схеме и количества плат машинный способ наиболее удобен.
Лабораторная работа № 3
Тема: Исследование алгоритма последовательного размещения конструктивных
элементов по монтажным местам ТЭЗа. Размещение последовательным
алгоритмом.
Цель работы:
Ознакомление студента с методами автоматизированного размещения электронных схем на этапе конструкторского проектирования с помощью последовательных алгоритмов.
Анализ преимуществ автоматизированного проектирования.
Закрепление практических навыков работы на ПЭВМ в диалоговом режиме.
Исходная схема, предназначенная для размещения и плата
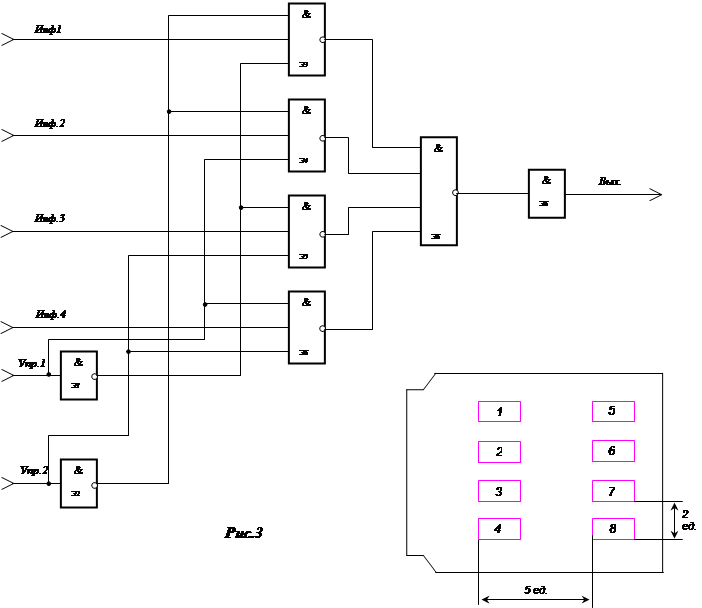
Дано:
N = 8 (элементов);
M = 8 (мест);
|
Закрепленное посадочное место – Р1;
Монтаж печатный.
Где:
N – число элементов схемы;
M – число посадочных мест.
Разместить схему (Рис.3) на плате (Рис.4).
Граф схемы
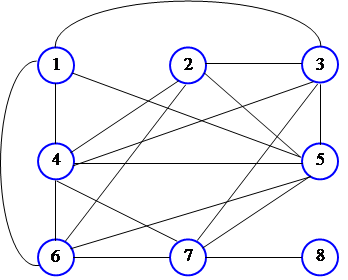 |
Рис.5
Граф схемы (рис.3)
Матрица связности графа схемы
| D 1 | D 2 | D 3 | D 4 | D 5 | D 6 | D 7 | D 8 | |
| D 1 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| D 2 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| D 3 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| D 4 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0 |
| D 5 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 0 |
| D 6 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 |
| D 7 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 |
| D 8 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
Таб.3
Матрица связности графа схемы (Рис.4)
Матрица расстояний
| D 1 | D 2 | D 3 | D 4 | D 5 | D 6 | D 7 | D 8 | |
| D 1 | 0 | 2 | 4 | 6 | 5 | 7 | 9 | 11 |
| D 2 | 2 | 0 | 2 | 4 | 7 | 5 | 7 | 9 |
| D 3 | 4 | 2 | 0 | 2 | 9 | 7 | 5 | 7 |
| D 4 | 6 | 4 | 2 | 0 | 11 | 9 | 7 | 5 |
| D 5 | 5 | 7 | 9 | 11 | 0 | 2 | 4 | 6 |
| D 6 | 7 | 5 | 7 | 9 | 2 | 0 | 2 | 4 |
| D 7 | 9 | 7 | 5 | 7 | 4 | 2 | 0 | 2 |
| D 8 | 11 | 9 | 7 | 5 | 6 | 4 | 2 | 0 |
Таб.4
Матрица расстояний схемы (Рис.3)
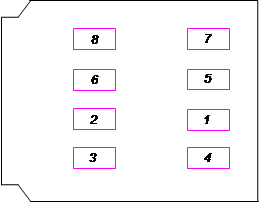
Вариант ручного размещения
 |
Матрица длины связей
| D 1 | D 2 | D 3 | D 4 | D 5 | D 6 | D 7 | D 8 | |
| D 1 | 0 | 5 | 7 | 2 | 2 | 7 | 0 | 0 |
| D 2 | 5 | 0 | 2 | 7 | 7 | 2 | 0 | 0 |
| D 3 | 7 | 2 | 0 | 5 | 9 | 4 | 11 | 0 |
| D 4 | 2 | 7 | 5 | 0 | 4 | 9 | 6 | 0 |
| D 5 | 2 | 7 | 9 | 4 | 0 | 5 | 2 | 0 |
| D 6 | 7 | 2 | 4 | 9 | 5 | 0 | 7 | 0 |
| D 7 | 0 | 0 | 11 | 6 | 2 | 7 | 0 | 5 |
| D 8 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 0 |
Таб.5
Суммарная связность = 106
Сравнительный анализ ручного и машинного размещения
|
из
5.00
|
Обсуждение в статье: Лабораторная работа № 2 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы